 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBPP: Long-Context Robot Imitation Learning by Focusing on Key History Frames
Feb 16, 2026Many robot tasks require attending to the history of past observations. For example, finding an item in a room requires remembering which places have already been searched. However, the best-performing robot policies typically condition only on the current observation, limiting their applicability to such tasks. Naively conditioning on past observations often fails due to spurious correlations: policies latch onto incidental features of training histories that do not generalize to out-of-distribution trajectories upon deployment. We analyze why policies latch onto these spurious correlations and find that this problem stems from limited coverage over the space of possible histories during training, which grows exponentially with horizon. Existing regularization techniques provide inconsistent benefits across tasks, as they do not fundamentally address this coverage problem. Motivated by these findings, we propose Big Picture Policies (BPP), an approach that conditions on a minimal set of meaningful keyframes detected by a vision-language model. By projecting diverse rollouts onto a compact set of task-relevant events, BPP substantially reduces distribution shift between training and deployment, without sacrificing expressivity. We evaluate BPP on four challenging real-world manipulation tasks and three simulation tasks, all requiring history conditioning. BPP achieves 70% higher success rates than the best comparison on real-world evaluations.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Learning the RoPEs: Better 2D and 3D Position Encodings with STRING
Feb 04, 2025



We introduce STRING: Separable Translationally Invariant Position Encodings. STRING extends Rotary Position Encodings, a recently proposed and widely used algorithm in large language models, via a unifying theoretical framework. Importantly, STRING still provides exact translation invariance, including token coordinates of arbitrary dimensionality, whilst maintaining a low computational footprint. These properties are especially important in robotics, where efficient 3D token representation is key. We integrate STRING into Vision Transformers with RGB(-D) inputs (color plus optional depth), showing substantial gains, e.g. in open-vocabulary object detection and for robotics controllers. We complement our experiments with a rigorous mathematical analysis, proving the universality of our methods.
Vision Language Models are In-Context Value Learners
Nov 07, 2024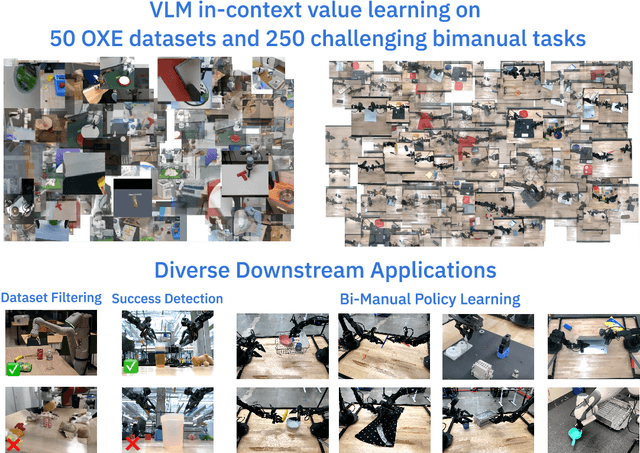
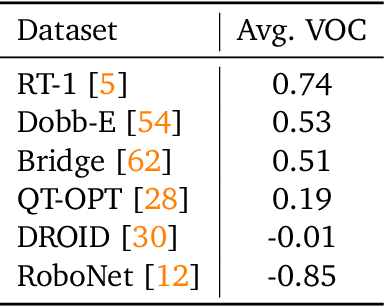
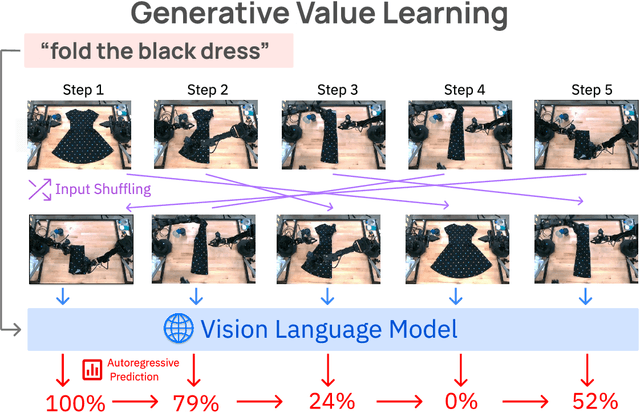
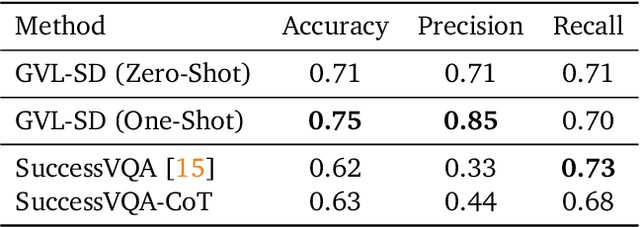
Predicting temporal progress from visual trajectories is important for intelligent robots that can learn, adapt, and improve. However, learning such progress estimator, or temporal value function, across different tasks and domains requires both a large amount of diverse data and methods which can scale and generalize. To address these challenges, we present Generative Value Learning (\GVL), a universal value function estimator that leverages the world knowledge embedded in vision-language models (VLMs) to predict task progress. Naively asking a VLM to predict values for a video sequence performs poorly due to the strong temporal correlation between successive frames. Instead, GVL poses value estimation as a temporal ordering problem over shuffled video frames; this seemingly more challenging task encourages VLMs to more fully exploit their underlying semantic and temporal grounding capabilities to differentiate frames based on their perceived task progress, consequently producing significantly better value predictions. Without any robot or task specific training, GVL can in-context zero-shot and few-shot predict effective values for more than 300 distinct real-world tasks across diverse robot platforms, including challenging bimanual manipulation tasks. Furthermore, we demonstrate that GVL permits flexible multi-modal in-context learning via examples from heterogeneous tasks and embodiments, such as human videos. The generality of GVL enables various downstream applications pertinent to visuomotor policy learning, including dataset filtering, success detection, and advantage-weighted regression -- all without any model training or finetuning.
Evaluating Real-World Robot Manipulation Policies in Simulation
May 09, 2024



The field of robotics has made significant advances towards generalist robot manipulation policies. However, real-world evaluation of such policies is not scalable and faces reproducibility challenges, which are likely to worsen as policies broaden the spectrum of tasks they can perform. We identify control and visual disparities between real and simulated environments as key challenges for reliable simulated evaluation and propose approaches for mitigating these gaps without needing to craft full-fidelity digital twins of real-world environments. We then employ these approaches to create SIMPLER, a collection of simulated environments for manipulation policy evaluation on common real robot setups. Through paired sim-and-real evaluations of manipulation policies, we demonstrate strong correlation between policy performance in SIMPLER environments and in the real world. Additionally, we find that SIMPLER evaluations accurately reflect real-world policy behavior modes such as sensitivity to various distribution shifts. We open-source all SIMPLER environments along with our workflow for creating new environments at https://simpler-env.github.io to facilitate research on general-purpose manipulation policies and simulated evaluation frameworks.
RT-Trajectory: Robotic Task Generalization via Hindsight Trajectory Sketches
Nov 06, 2023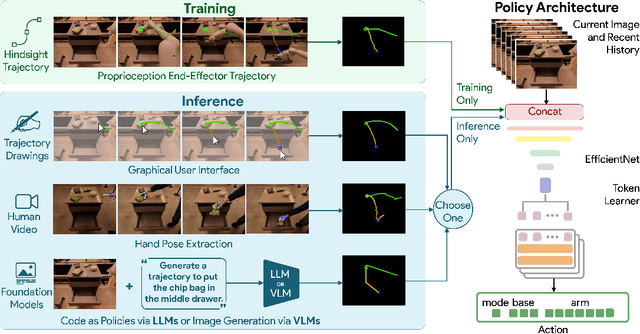
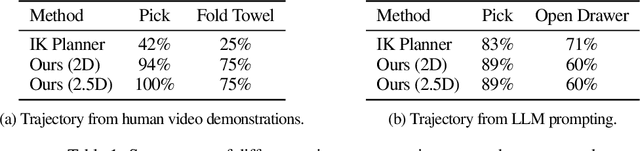
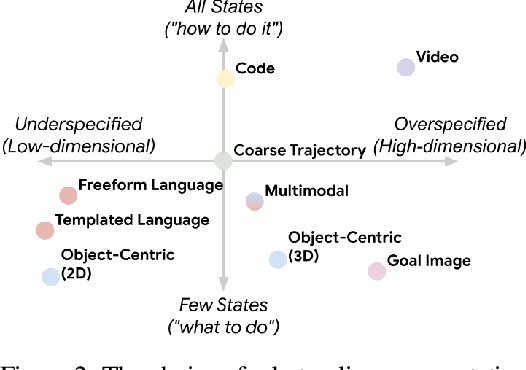
Generalization remains one of the most important desiderata for robust robot learning systems. While recently proposed approaches show promise in generalization to novel objects, semantic concepts, or visual distribution shifts, generalization to new tasks remains challenging. For example, a language-conditioned policy trained on pick-and-place tasks will not be able to generalize to a folding task, even if the arm trajectory of folding is similar to pick-and-place. Our key insight is that this kind of generalization becomes feasible if we represent the task through rough trajectory sketches. We propose a policy conditioning method using such rough trajectory sketches, which we call RT-Trajectory, that is practical, easy to specify, and allows the policy to effectively perform new tasks that would otherwise be challenging to perform. We find that trajectory sketches strike a balance between being detailed enough to express low-level motion-centric guidance while being coarse enough to allow the learned policy to interpret the trajectory sketch in the context of situational visual observations. In addition, we show how trajectory sketches can provide a useful interface to communicate with robotic policies: they can be specified through simple human inputs like drawings or videos, or through automated methods such as modern image-generating or waypoint-generating methods. We evaluate RT-Trajectory at scale on a variety of real-world robotic tasks, and find that RT-Trajectory is able to perform a wider range of tasks compared to language-conditioned and goal-conditioned policies, when provided the same training data.
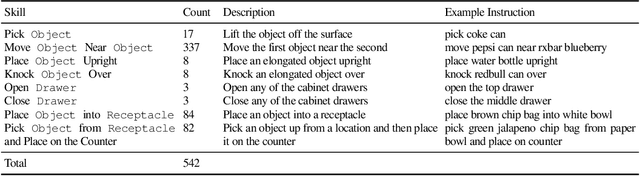
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
Jul 28, 2023We study how vision-language models trained on Internet-scale data can be incorporated directly into end-to-end robotic control to boost generalization and enable emergent semantic reasoning. Our goal is to enable a single end-to-end trained model to both learn to map robot observations to actions and enjoy the benefits of large-scale pretraining on language and vision-language data from the web. To this end, we propose to co-fine-tune state-of-the-art vision-language models on both robotic trajectory data and Internet-scale vision-language tasks, such as visual question answering. In contrast to other approaches, we propose a simple, general recipe to achieve this goal: in order to fit both natural language responses and robotic actions into the same format, we express the actions as text tokens and incorporate them directly into the training set of the model in the same way as natural language tokens. We refer to such category of models as vision-language-action models (VLA) and instantiate an example of such a model, which we call RT-2. Our extensive evaluation (6k evaluation trials) shows that our approach leads to performant robotic policies and enables RT-2 to obtain a range of emergent capabilities from Internet-scale training. This includes significantly improved generalization to novel objects, the ability to interpret commands not present in the robot training data (such as placing an object onto a particular number or icon), and the ability to perform rudimentary reasoning in response to user commands (such as picking up the smallest or largest object, or the one closest to another object). We further show that incorporating chain of thought reasoning allows RT-2 to perform multi-stage semantic reasoning, for example figuring out which object to pick up for use as an improvised hammer (a rock), or which type of drink is best suited for someone who is tired (an energy drink).
Language to Rewards for Robotic Skill Synthesis
Jun 16, 2023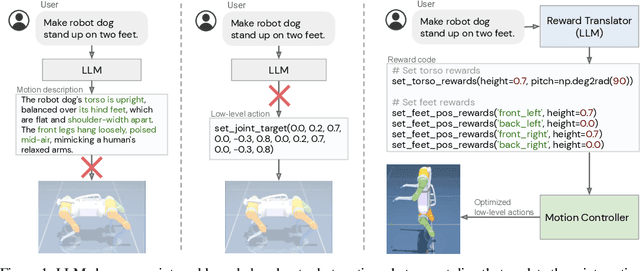
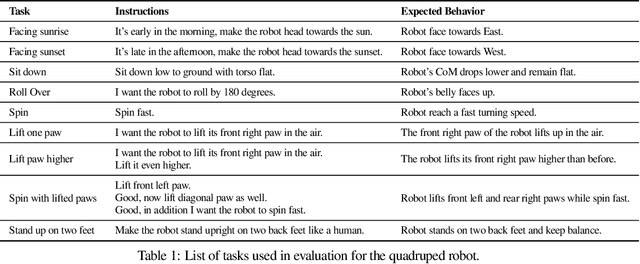
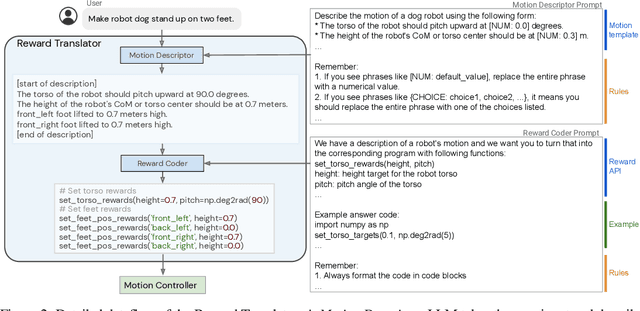
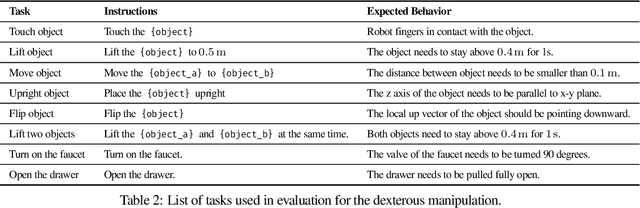
Large language models (LLMs) have demonstrated exciting progress in acquiring diverse new capabilities through in-context learning, ranging from logical reasoning to code-writing. Robotics researchers have also explored using LLMs to advance the capabilities of robotic control. However, since low-level robot actions are hardware-dependent and underrepresented in LLM training corpora, existing efforts in applying LLMs to robotics have largely treated LLMs as semantic planners or relied on human-engineered control primitives to interface with the robot. On the other hand, reward functions are shown to be flexible representations that can be optimized for control policies to achieve diverse tasks, while their semantic richness makes them suitable to be specified by LLMs. In this work, we introduce a new paradigm that harnesses this realization by utilizing LLMs to define reward parameters that can be optimized and accomplish variety of robotic tasks. Using reward as the intermediate interface generated by LLMs, we can effectively bridge the gap between high-level language instructions or corrections to low-level robot actions. Meanwhile, combining this with a real-time optimizer, MuJoCo MPC, empowers an interactive behavior creation experience where users can immediately observe the results and provide feedback to the system. To systematically evaluate the performance of our proposed method, we designed a total of 17 tasks for a simulated quadruped robot and a dexterous manipulator robot. We demonstrate that our proposed method reliably tackles 90% of the designed tasks, while a baseline using primitive skills as the interface with Code-as-policies achieves 50% of the tasks. We further validated our method on a real robot arm where complex manipulation skills such as non-prehensile pushing emerge through our interactive system.
On Designing a Learning Robot: Improving Morphology for Enhanced Task Performance and Learning
Mar 23, 2023As robots become more prevalent, optimizing their design for better performance and efficiency is becoming increasingly important. However, current robot design practices overlook the impact of perception and design choices on a robot's learning capabilities. To address this gap, we propose a comprehensive methodology that accounts for the interplay between the robot's perception, hardware characteristics, and task requirements. Our approach optimizes the robot's morphology holistically, leading to improved learning and task execution proficiency. To achieve this, we introduce a Morphology-AGnostIc Controller (MAGIC), which helps with the rapid assessment of different robot designs. The MAGIC policy is efficiently trained through a novel PRIvileged Single-stage learning via latent alignMent (PRISM) framework, which also encourages behaviors that are typical of robot onboard observation. Our simulation-based results demonstrate that morphologies optimized holistically improve the robot performance by 15-20% on various manipulation tasks, and require 25x less data to match human-expert made morphology performance. In summary, our work contributes to the growing trend of learning-based approaches in robotics and emphasizes the potential in designing robots that facilitate better learning.