 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTether: Autonomous Functional Play with Correspondence-Driven Trajectory Warping
Mar 03, 2026The ability to conduct and learn from interaction and experience is a central challenge in robotics, offering a scalable alternative to labor-intensive human demonstrations. However, realizing such "play" requires (1) a policy robust to diverse, potentially out-of-distribution environment states, and (2) a procedure that continuously produces useful robot experience. To address these challenges, we introduce Tether, a method for autonomous functional play involving structured, task-directed interactions. First, we design a novel open-loop policy that warps actions from a small set of source demonstrations (<=10) by anchoring them to semantic keypoint correspondences in the target scene. We show that this design is extremely data-efficient and robust even under significant spatial and semantic variations. Second, we deploy this policy for autonomous functional play in the real world via a continuous cycle of task selection, execution, evaluation, and improvement, guided by the visual understanding capabilities of vision-language models. This procedure generates diverse, high-quality datasets with minimal human intervention. In a household-like multi-object setup, our method is the first to perform many hours of autonomous multi-task play in the real world starting from only a handful of demonstrations. This produces a stream of data that consistently improves the performance of closed-loop imitation policies over time, ultimately yielding over 1000 expert-level trajectories and training policies competitive with those learned from human-collected demonstrations.
Vision Language Models are In-Context Value Learners
Nov 07, 2024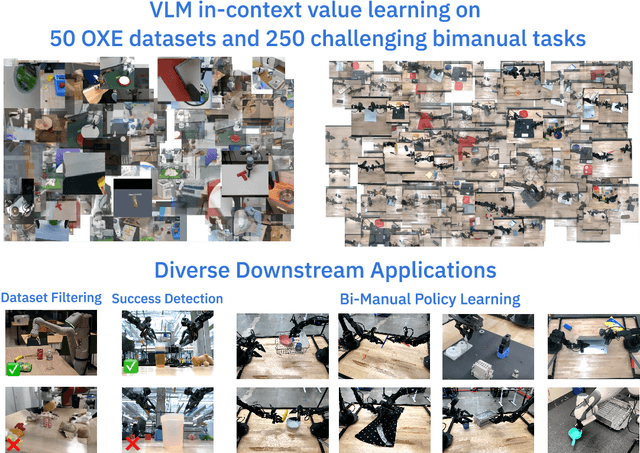
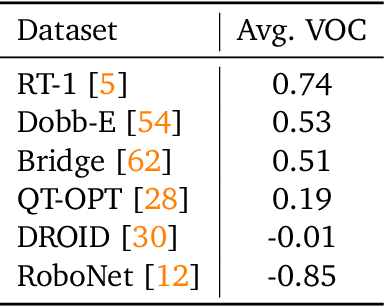
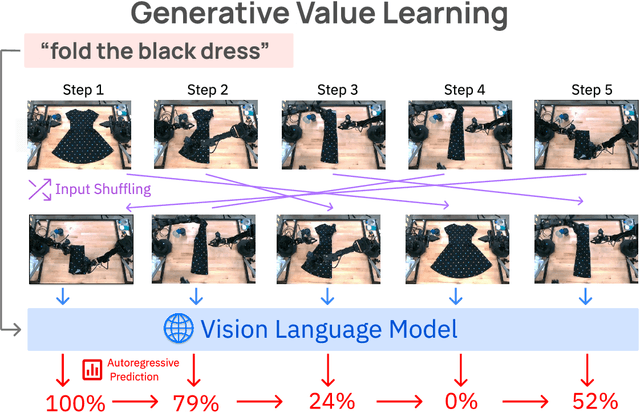
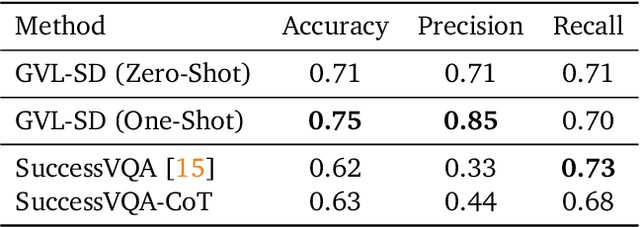
Predicting temporal progress from visual trajectories is important for intelligent robots that can learn, adapt, and improve. However, learning such progress estimator, or temporal value function, across different tasks and domains requires both a large amount of diverse data and methods which can scale and generalize. To address these challenges, we present Generative Value Learning (\GVL), a universal value function estimator that leverages the world knowledge embedded in vision-language models (VLMs) to predict task progress. Naively asking a VLM to predict values for a video sequence performs poorly due to the strong temporal correlation between successive frames. Instead, GVL poses value estimation as a temporal ordering problem over shuffled video frames; this seemingly more challenging task encourages VLMs to more fully exploit their underlying semantic and temporal grounding capabilities to differentiate frames based on their perceived task progress, consequently producing significantly better value predictions. Without any robot or task specific training, GVL can in-context zero-shot and few-shot predict effective values for more than 300 distinct real-world tasks across diverse robot platforms, including challenging bimanual manipulation tasks. Furthermore, we demonstrate that GVL permits flexible multi-modal in-context learning via examples from heterogeneous tasks and embodiments, such as human videos. The generality of GVL enables various downstream applications pertinent to visuomotor policy learning, including dataset filtering, success detection, and advantage-weighted regression -- all without any model training or finetuning.
Eurekaverse: Environment Curriculum Generation via Large Language Models
Nov 04, 2024
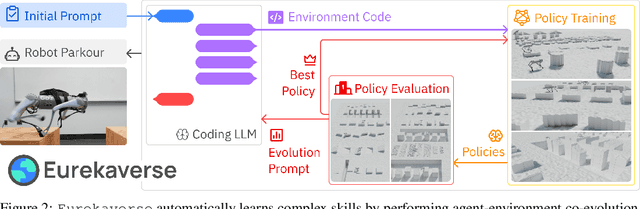
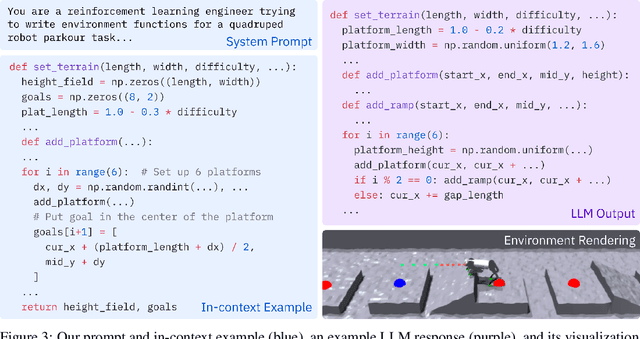
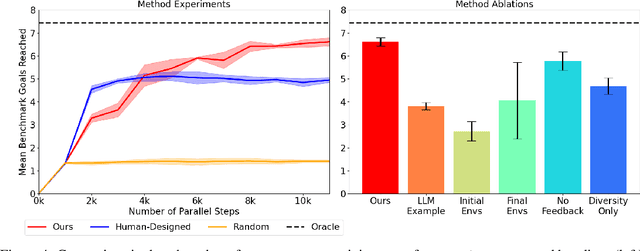
Recent work has demonstrated that a promising strategy for teaching robots a wide range of complex skills is by training them on a curriculum of progressively more challenging environments. However, developing an effective curriculum of environment distributions currently requires significant expertise, which must be repeated for every new domain. Our key insight is that environments are often naturally represented as code. Thus, we probe whether effective environment curriculum design can be achieved and automated via code generation by large language models (LLM). In this paper, we introduce Eurekaverse, an unsupervised environment design algorithm that uses LLMs to sample progressively more challenging, diverse, and learnable environments for skill training. We validate Eurekaverse's effectiveness in the domain of quadrupedal parkour learning, in which a quadruped robot must traverse through a variety of obstacle courses. The automatic curriculum designed by Eurekaverse enables gradual learning of complex parkour skills in simulation and can successfully transfer to the real-world, outperforming manual training courses designed by humans.
On-Robot Reinforcement Learning with Goal-Contrastive Rewards
Oct 25, 2024Reinforcement Learning (RL) has the potential to enable robots to learn from their own actions in the real world. Unfortunately, RL can be prohibitively expensive, in terms of on-robot runtime, due to inefficient exploration when learning from a sparse reward signal. Designing dense reward functions is labour-intensive and requires domain expertise. In our work, we propose GCR (Goal-Contrastive Rewards), a dense reward function learning method that can be trained on passive video demonstrations. By using videos without actions, our method is easier to scale, as we can use arbitrary videos. GCR combines two loss functions, an implicit value loss function that models how the reward increases when traversing a successful trajectory, and a goal-contrastive loss that discriminates between successful and failed trajectories. We perform experiments in simulated manipulation environments across RoboMimic and MimicGen tasks, as well as in the real world using a Franka arm and a Spot quadruped. We find that GCR leads to a more-sample efficient RL, enabling model-free RL to solve about twice as many tasks as our baseline reward learning methods. We also demonstrate positive cross-embodiment transfer from videos of people and of other robots performing a task. Appendix: \url{https://tinyurl.com/gcr-appendix-2}.
DrEureka: Language Model Guided Sim-To-Real Transfer
Jun 04, 2024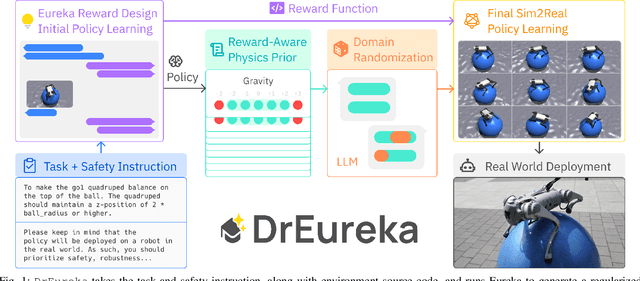
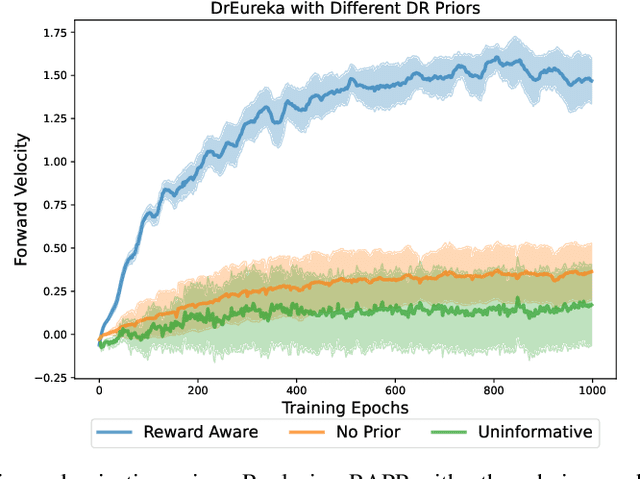

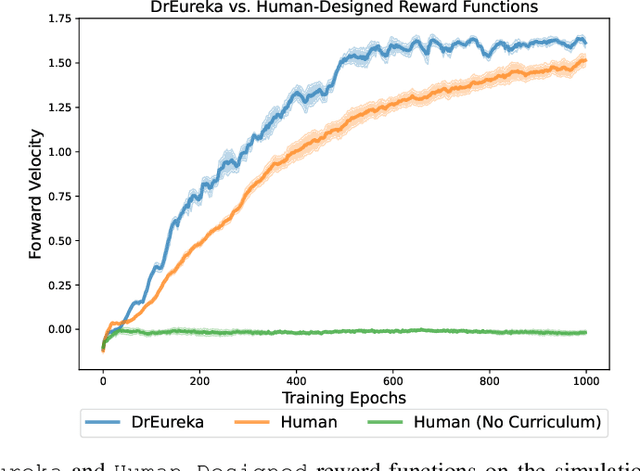
Transferring policies learned in simulation to the real world is a promising strategy for acquiring robot skills at scale. However, sim-to-real approaches typically rely on manual design and tuning of the task reward function as well as the simulation physics parameters, rendering the process slow and human-labor intensive. In this paper, we investigate using Large Language Models (LLMs) to automate and accelerate sim-to-real design. Our LLM-guided sim-to-real approach, DrEureka, requires only the physics simulation for the target task and automatically constructs suitable reward functions and domain randomization distributions to support real-world transfer. We first demonstrate that our approach can discover sim-to-real configurations that are competitive with existing human-designed ones on quadruped locomotion and dexterous manipulation tasks. Then, we showcase that our approach is capable of solving novel robot tasks, such as quadruped balancing and walking atop a yoga ball, without iterative manual design.
Composing Pre-Trained Object-Centric Representations for Robotics From "What" and "Where" Foundation Models
Apr 20, 2024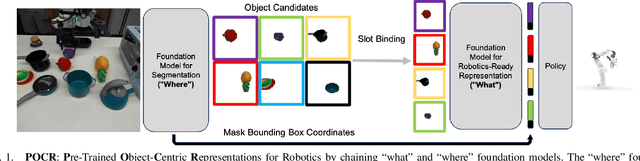
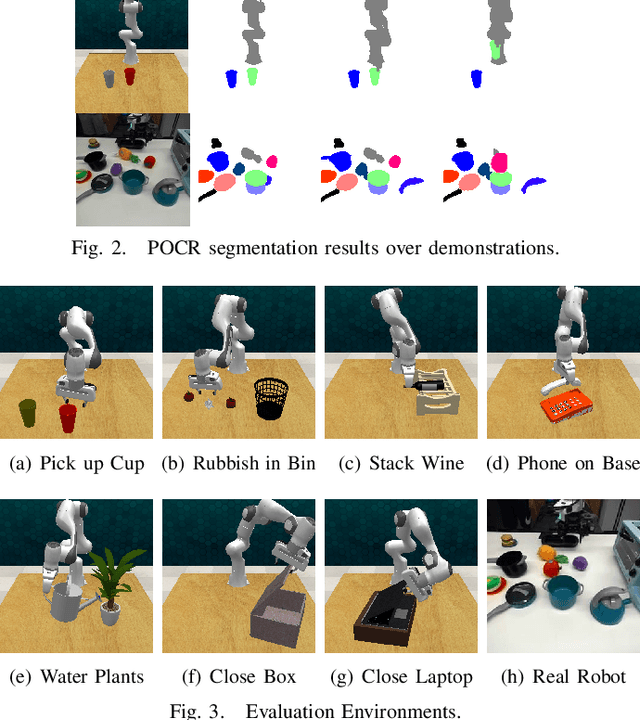
There have recently been large advances both in pre-training visual representations for robotic control and segmenting unknown category objects in general images. To leverage these for improved robot learning, we propose $\textbf{POCR}$, a new framework for building pre-trained object-centric representations for robotic control. Building on theories of "what-where" representations in psychology and computer vision, we use segmentations from a pre-trained model to stably locate across timesteps, various entities in the scene, capturing "where" information. To each such segmented entity, we apply other pre-trained models that build vector descriptions suitable for robotic control tasks, thus capturing "what" the entity is. Thus, our pre-trained object-centric representations for control are constructed by appropriately combining the outputs of off-the-shelf pre-trained models, with no new training. On various simulated and real robotic tasks, we show that imitation policies for robotic manipulators trained on POCR achieve better performance and systematic generalization than state of the art pre-trained representations for robotics, as well as prior object-centric representations that are typically trained from scratch.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Eureka: Human-Level Reward Design via Coding Large Language Models
Oct 19, 2023



Large Language Models (LLMs) have excelled as high-level semantic planners for sequential decision-making tasks. However, harnessing them to learn complex low-level manipulation tasks, such as dexterous pen spinning, remains an open problem. We bridge this fundamental gap and present Eureka, a human-level reward design algorithm powered by LLMs. Eureka exploits the remarkable zero-shot generation, code-writing, and in-context improvement capabilities of state-of-the-art LLMs, such as GPT-4, to perform evolutionary optimization over reward code. The resulting rewards can then be used to acquire complex skills via reinforcement learning. Without any task-specific prompting or pre-defined reward templates, Eureka generates reward functions that outperform expert human-engineered rewards. In a diverse suite of 29 open-source RL environments that include 10 distinct robot morphologies, Eureka outperforms human experts on 83% of the tasks, leading to an average normalized improvement of 52%. The generality of Eureka also enables a new gradient-free in-context learning approach to reinforcement learning from human feedback (RLHF), readily incorporating human inputs to improve the quality and the safety of the generated rewards without model updating. Finally, using Eureka rewards in a curriculum learning setting, we demonstrate for the first time, a simulated Shadow Hand capable of performing pen spinning tricks, adeptly manipulating a pen in circles at rapid speed.
Universal Visual Decomposer: Long-Horizon Manipulation Made Easy
Oct 12, 2023



Real-world robotic tasks stretch over extended horizons and encompass multiple stages. Learning long-horizon manipulation tasks, however, is a long-standing challenge, and demands decomposing the overarching task into several manageable subtasks to facilitate policy learning and generalization to unseen tasks. Prior task decomposition methods require task-specific knowledge, are computationally intensive, and cannot readily be applied to new tasks. To address these shortcomings, we propose Universal Visual Decomposer (UVD), an off-the-shelf task decomposition method for visual long horizon manipulation using pre-trained visual representations designed for robotic control. At a high level, UVD discovers subgoals by detecting phase shifts in the embedding space of the pre-trained representation. Operating purely on visual demonstrations without auxiliary information, UVD can effectively extract visual subgoals embedded in the videos, while incurring zero additional training cost on top of standard visuomotor policy training. Goal-conditioned policies learned with UVD-discovered subgoals exhibit significantly improved compositional generalization at test time to unseen tasks. Furthermore, UVD-discovered subgoals can be used to construct goal-based reward shaping that jump-starts temporally extended exploration for reinforcement learning. We extensively evaluate UVD on both simulation and real-world tasks, and in all cases, UVD substantially outperforms baselines across imitation and reinforcement learning settings on in-domain and out-of-domain task sequences alike, validating the clear advantage of automated visual task decomposition within the simple, compact UVD framework.
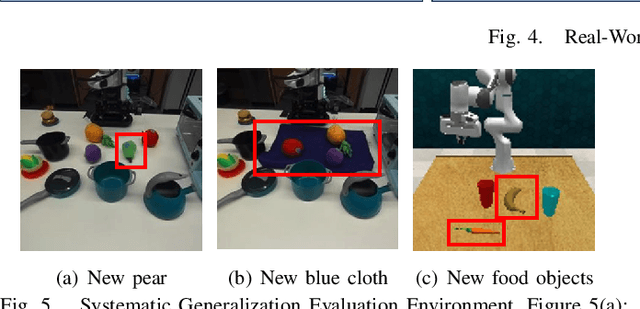
LIV: Language-Image Representations and Rewards for Robotic Control
Jun 01, 2023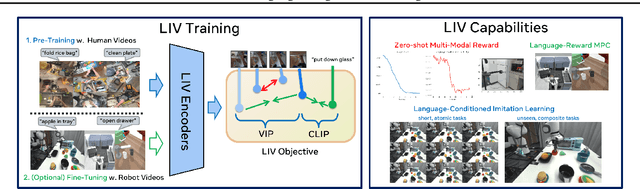
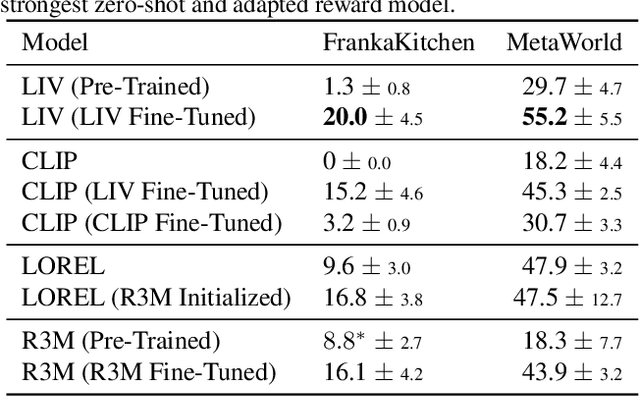
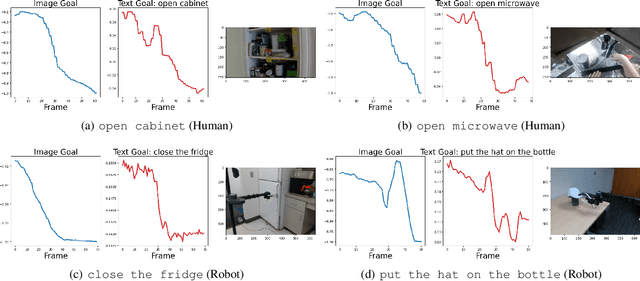
We present Language-Image Value learning (LIV), a unified objective for vision-language representation and reward learning from action-free videos with text annotations. Exploiting a novel connection between dual reinforcement learning and mutual information contrastive learning, the LIV objective trains a multi-modal representation that implicitly encodes a universal value function for tasks specified as language or image goals. We use LIV to pre-train the first control-centric vision-language representation from large human video datasets such as EpicKitchen. Given only a language or image goal, the pre-trained LIV model can assign dense rewards to each frame in videos of unseen robots or humans attempting that task in unseen environments. Further, when some target domain-specific data is available, the same objective can be used to fine-tune and improve LIV and even other pre-trained representations for robotic control and reward specification in that domain. In our experiments on several simulated and real-world robot environments, LIV models consistently outperform the best prior input state representations for imitation learning, as well as reward specification methods for policy synthesis. Our results validate the advantages of joint vision-language representation and reward learning within the unified, compact LIV framework.