 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArgus: Vision-Centric Reasoning with Grounded Chain-of-Thought
May 29, 2025Recent advances in multimodal large language models (MLLMs) have demonstrated remarkable capabilities in vision-language tasks, yet they often struggle with vision-centric scenarios where precise visual focus is needed for accurate reasoning. In this paper, we introduce Argus to address these limitations with a new visual attention grounding mechanism. Our approach employs object-centric grounding as visual chain-of-thought signals, enabling more effective goal-conditioned visual attention during multimodal reasoning tasks. Evaluations on diverse benchmarks demonstrate that Argus excels in both multimodal reasoning tasks and referring object grounding tasks. Extensive analysis further validates various design choices of Argus, and reveals the effectiveness of explicit language-guided visual region-of-interest engagement in MLLMs, highlighting the importance of advancing multimodal intelligence from a visual-centric perspective. Project page: https://yunzeman.github.io/argus/
FRAG: Frame Selection Augmented Generation for Long Video and Long Document Understanding
Apr 24, 2025



There has been impressive progress in Large Multimodal Models (LMMs). Recent works extend these models to long inputs, including multi-page documents and long videos. However, the model size and performance of these long context models are still limited due to the computational cost in both training and inference. In this work, we explore an orthogonal direction and process long inputs without long context LMMs. We propose Frame Selection Augmented Generation (FRAG), where the model first selects relevant frames within the input, and then only generates the final outputs based on the selected frames. The core of the selection process is done by scoring each frame independently, which does not require long context processing. The frames with the highest scores are then selected by a simple Top-K selection. We show that this frustratingly simple framework is applicable to both long videos and multi-page documents using existing LMMs without any fine-tuning. We consider two models, LLaVA-OneVision and InternVL2, in our experiments and show that FRAG consistently improves the performance and achieves state-of-the-art performances for both long video and long document understanding. For videos, FRAG substantially improves InternVL2-76B by 5.8% on MLVU and 3.7% on Video-MME. For documents, FRAG achieves over 20% improvements on MP-DocVQA compared with recent LMMs specialized in long document understanding. Code is available at: https://github.com/NVlabs/FRAG
Eagle 2.5: Boosting Long-Context Post-Training for Frontier Vision-Language Models
Apr 21, 2025We introduce Eagle 2.5, a family of frontier vision-language models (VLMs) for long-context multimodal learning. Our work addresses the challenges in long video comprehension and high-resolution image understanding, introducing a generalist framework for both tasks. The proposed training framework incorporates Automatic Degrade Sampling and Image Area Preservation, two techniques that preserve contextual integrity and visual details. The framework also includes numerous efficiency optimizations in the pipeline for long-context data training. Finally, we propose Eagle-Video-110K, a novel dataset that integrates both story-level and clip-level annotations, facilitating long-video understanding. Eagle 2.5 demonstrates substantial improvements on long-context multimodal benchmarks, providing a robust solution to the limitations of existing VLMs. Notably, our best model Eagle 2.5-8B achieves 72.4% on Video-MME with 512 input frames, matching the results of top-tier commercial model such as GPT-4o and large-scale open-source models like Qwen2.5-VL-72B and InternVL2.5-78B.
Token-Efficient Long Video Understanding for Multimodal LLMs
Mar 06, 2025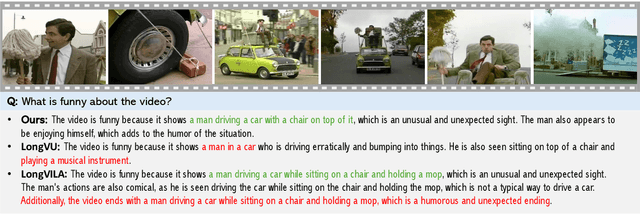
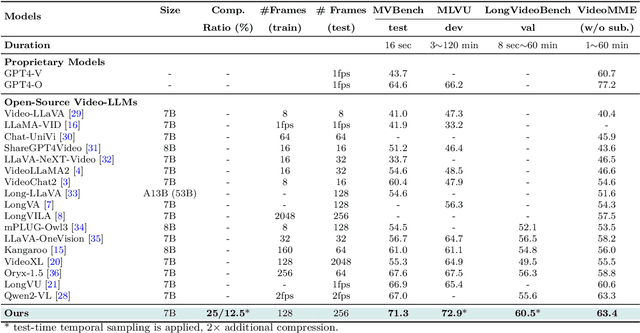
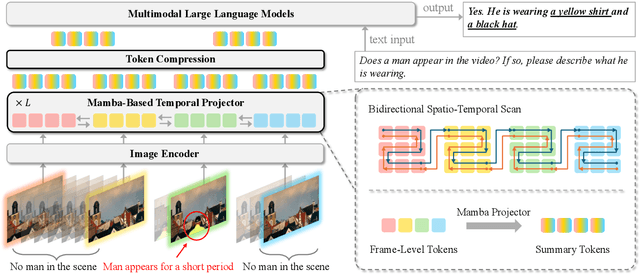
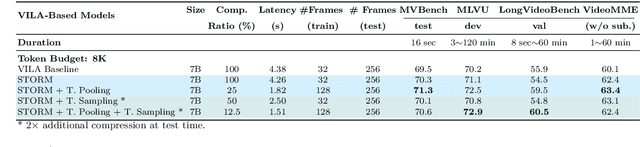
Recent advances in video-based multimodal large language models (Video-LLMs) have significantly improved video understanding by processing videos as sequences of image frames. However, many existing methods treat frames independently in the vision backbone, lacking explicit temporal modeling, which limits their ability to capture dynamic patterns and efficiently handle long videos. To address these limitations, we introduce STORM (\textbf{S}patiotemporal \textbf{TO}ken \textbf{R}eduction for \textbf{M}ultimodal LLMs), a novel architecture incorporating a dedicated temporal encoder between the image encoder and the LLM. Our temporal encoder leverages the Mamba State Space Model to integrate temporal information into image tokens, generating enriched representations that preserve inter-frame dynamics across the entire video sequence. This enriched encoding not only enhances video reasoning capabilities but also enables effective token reduction strategies, including test-time sampling and training-based temporal and spatial pooling, substantially reducing computational demands on the LLM without sacrificing key temporal information. By integrating these techniques, our approach simultaneously reduces training and inference latency while improving performance, enabling efficient and robust video understanding over extended temporal contexts. Extensive evaluations show that STORM achieves state-of-the-art results across various long video understanding benchmarks (more than 5\% improvement on MLVU and LongVideoBench) while reducing the computation costs by up to $8\times$ and the decoding latency by 2.4-2.9$\times$ for the fixed numbers of input frames. Project page is available at https://research.nvidia.com/labs/lpr/storm
QLIP: Text-Aligned Visual Tokenization Unifies Auto-Regressive Multimodal Understanding and Generation
Feb 07, 2025We introduce Quantized Language-Image Pretraining (QLIP), a visual tokenization method that combines state-of-the-art reconstruction quality with state-of-the-art zero-shot image understanding. QLIP trains a binary-spherical-quantization-based autoencoder with reconstruction and language-image alignment objectives. We are the first to show that the two objectives do not need to be at odds. We balance the two loss terms dynamically during training and show that a two-stage training pipeline effectively mixes the large-batch requirements of image-language pre-training with the memory bottleneck imposed by the reconstruction objective. We validate the effectiveness of QLIP for multimodal understanding and text-conditioned image generation with a single model. Specifically, QLIP serves as a drop-in replacement for the visual encoder for LLaVA and the image tokenizer for LlamaGen with comparable or even better performance. Finally, we demonstrate that QLIP enables a unified mixed-modality auto-regressive model for understanding and generation.
Omni-RGPT: Unifying Image and Video Region-level Understanding via Token Marks
Jan 14, 2025We present Omni-RGPT, a multimodal large language model designed to facilitate region-level comprehension for both images and videos. To achieve consistent region representation across spatio-temporal dimensions, we introduce Token Mark, a set of tokens highlighting the target regions within the visual feature space. These tokens are directly embedded into spatial regions using region prompts (e.g., boxes or masks) and simultaneously incorporated into the text prompt to specify the target, establishing a direct connection between visual and text tokens. To further support robust video understanding without requiring tracklets, we introduce an auxiliary task that guides Token Mark by leveraging the consistency of the tokens, enabling stable region interpretation across the video. Additionally, we introduce a large-scale region-level video instruction dataset (RegVID-300k). Omni-RGPT achieves state-of-the-art results on image and video-based commonsense reasoning benchmarks while showing strong performance in captioning and referring expression comprehension tasks.
NVILA: Efficient Frontier Visual Language Models
Dec 05, 2024
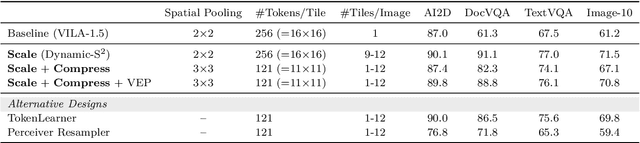
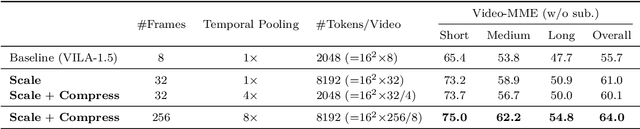
Visual language models (VLMs) have made significant advances in accuracy in recent years. However, their efficiency has received much less attention. This paper introduces NVILA, a family of open VLMs designed to optimize both efficiency and accuracy. Building on top of VILA, we improve its model architecture by first scaling up the spatial and temporal resolutions, and then compressing visual tokens. This "scale-then-compress" approach enables NVILA to efficiently process high-resolution images and long videos. We also conduct a systematic investigation to enhance the efficiency of NVILA throughout its entire lifecycle, from training and fine-tuning to deployment. NVILA matches or surpasses the accuracy of many leading open and proprietary VLMs across a wide range of image and video benchmarks. At the same time, it reduces training costs by 4.5X, fine-tuning memory usage by 3.4X, pre-filling latency by 1.6-2.2X, and decoding latency by 1.2-2.8X. We will soon make our code and models available to facilitate reproducibility.
Eagle: Exploring The Design Space for Multimodal LLMs with Mixture of Encoders
Aug 28, 2024



The ability to accurately interpret complex visual information is a crucial topic of multimodal large language models (MLLMs). Recent work indicates that enhanced visual perception significantly reduces hallucinations and improves performance on resolution-sensitive tasks, such as optical character recognition and document analysis. A number of recent MLLMs achieve this goal using a mixture of vision encoders. Despite their success, there is a lack of systematic comparisons and detailed ablation studies addressing critical aspects, such as expert selection and the integration of multiple vision experts. This study provides an extensive exploration of the design space for MLLMs using a mixture of vision encoders and resolutions. Our findings reveal several underlying principles common to various existing strategies, leading to a streamlined yet effective design approach. We discover that simply concatenating visual tokens from a set of complementary vision encoders is as effective as more complex mixing architectures or strategies. We additionally introduce Pre-Alignment to bridge the gap between vision-focused encoders and language tokens, enhancing model coherence. The resulting family of MLLMs, Eagle, surpasses other leading open-source models on major MLLM benchmarks. Models and code: https://github.com/NVlabs/Eagle
ARDuP: Active Region Video Diffusion for Universal Policies
Jun 19, 2024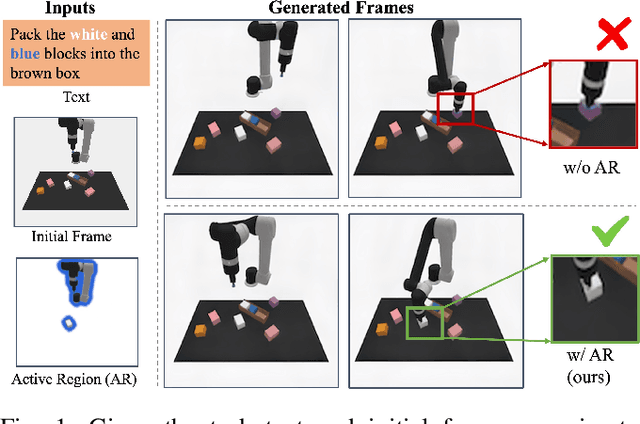
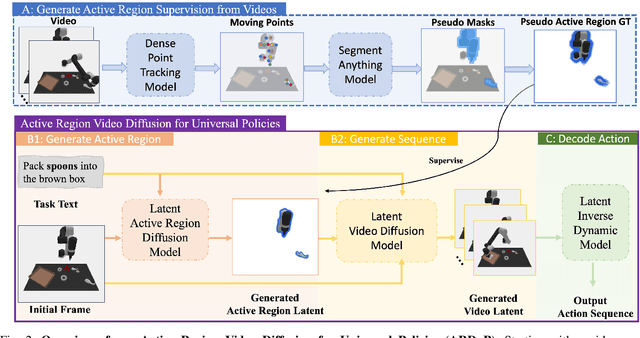
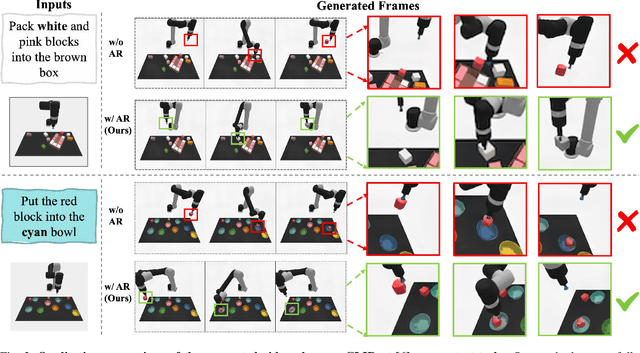
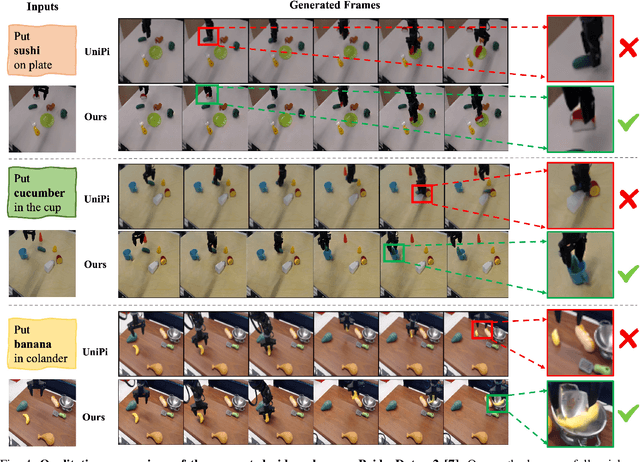
Sequential decision-making can be formulated as a text-conditioned video generation problem, where a video planner, guided by a text-defined goal, generates future frames visualizing planned actions, from which control actions are subsequently derived. In this work, we introduce Active Region Video Diffusion for Universal Policies (ARDuP), a novel framework for video-based policy learning that emphasizes the generation of active regions, i.e. potential interaction areas, enhancing the conditional policy's focus on interactive areas critical for task execution. This innovative framework integrates active region conditioning with latent diffusion models for video planning and employs latent representations for direct action decoding during inverse dynamic modeling. By utilizing motion cues in videos for automatic active region discovery, our method eliminates the need for manual annotations of active regions. We validate ARDuP's efficacy via extensive experiments on simulator CLIPort and the real-world dataset BridgeData v2, achieving notable improvements in success rates and generating convincingly realistic video plans.
X-VILA: Cross-Modality Alignment for Large Language Model
May 29, 2024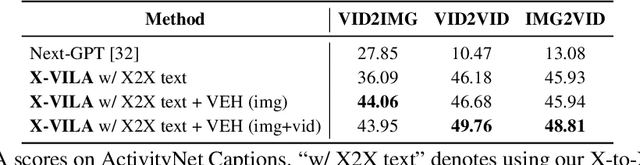
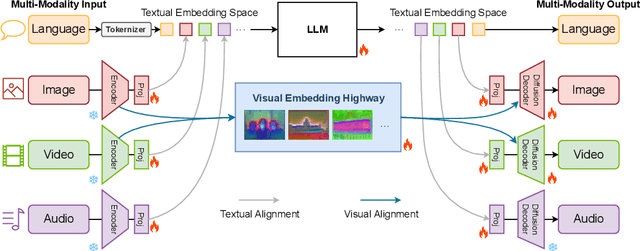
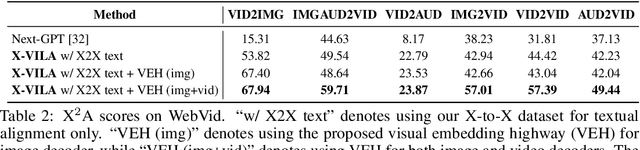
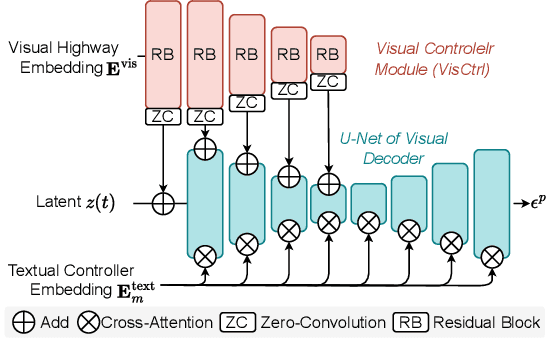
We introduce X-VILA, an omni-modality model designed to extend the capabilities of large language models (LLMs) by incorporating image, video, and audio modalities. By aligning modality-specific encoders with LLM inputs and diffusion decoders with LLM outputs, X-VILA achieves cross-modality understanding, reasoning, and generation. To facilitate this cross-modality alignment, we curate an effective interleaved any-to-any modality instruction-following dataset. Furthermore, we identify a significant problem with the current cross-modality alignment method, which results in visual information loss. To address the issue, we propose a visual alignment mechanism with a visual embedding highway module. We then introduce a resource-efficient recipe for training X-VILA, that exhibits proficiency in any-to-any modality conversation, surpassing previous approaches by large margins. X-VILA also showcases emergent properties across modalities even in the absence of similar training data. The project will be made open-source.