 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFoundationMotion: Auto-Labeling and Reasoning about Spatial Movement in Videos
Dec 11, 2025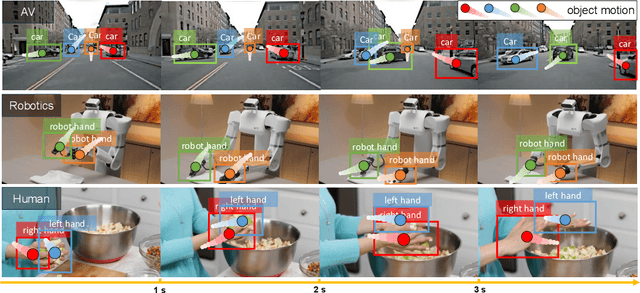
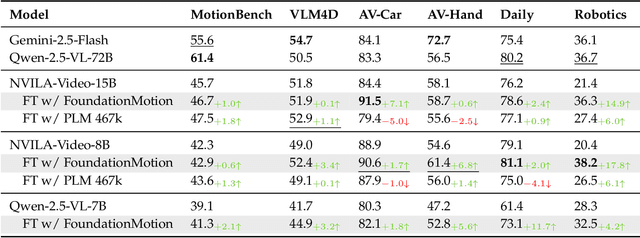
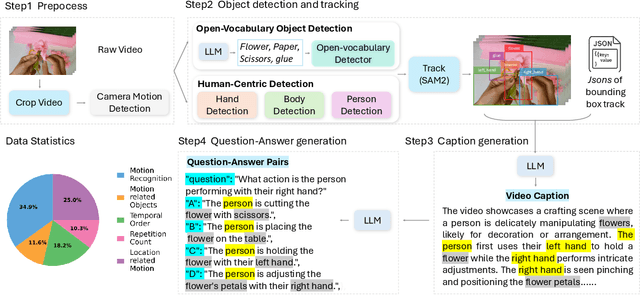
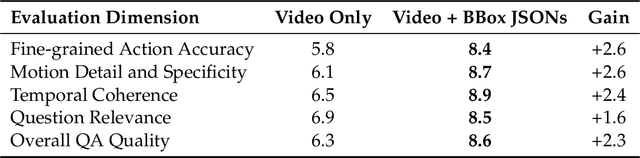
Motion understanding is fundamental to physical reasoning, enabling models to infer dynamics and predict future states. However, state-of-the-art models still struggle on recent motion benchmarks, primarily due to the scarcity of large-scale, fine-grained motion datasets. Existing motion datasets are often constructed from costly manual annotation, severely limiting scalability. To address this challenge, we introduce FoundationMotion, a fully automated data curation pipeline that constructs large-scale motion datasets. Our approach first detects and tracks objects in videos to extract their trajectories, then leverages these trajectories and video frames with Large Language Models (LLMs) to generate fine-grained captions and diverse question-answer pairs about motion and spatial reasoning. Using datasets produced by this pipeline, we fine-tune open-source models including NVILA-Video-15B and Qwen2.5-7B, achieving substantial improvements in motion understanding without compromising performance on other tasks. Notably, our models outperform strong closed-source baselines like Gemini-2.5 Flash and large open-source models such as Qwen2.5-VL-72B across diverse motion understanding datasets and benchmarks. FoundationMotion thus provides a scalable solution for curating fine-grained motion datasets that enable effective fine-tuning of diverse models to enhance motion understanding and spatial reasoning capabilities.
Scaling RL to Long Videos
Jul 10, 2025We introduce a full-stack framework that scales up reasoning in vision-language models (VLMs) to long videos, leveraging reinforcement learning. We address the unique challenges of long video reasoning by integrating three critical components: (1) a large-scale dataset, LongVideo-Reason, comprising 52K long video QA pairs with high-quality reasoning annotations across diverse domains such as sports, games, and vlogs; (2) a two-stage training pipeline that extends VLMs with chain-of-thought supervised fine-tuning (CoT-SFT) and reinforcement learning (RL); and (3) a training infrastructure for long video RL, named Multi-modal Reinforcement Sequence Parallelism (MR-SP), which incorporates sequence parallelism and a vLLM-based engine tailored for long video, using cached video embeddings for efficient rollout and prefilling. In experiments, LongVILA-R1-7B achieves strong performance on long video QA benchmarks such as VideoMME. It also outperforms Video-R1-7B and even matches Gemini-1.5-Pro across temporal reasoning, goal and purpose reasoning, spatial reasoning, and plot reasoning on our LongVideo-Reason-eval benchmark. Notably, our MR-SP system achieves up to 2.1x speedup on long video RL training. LongVILA-R1 demonstrates consistent performance gains as the number of input video frames scales. LongVILA-R1 marks a firm step towards long video reasoning in VLMs. In addition, we release our training system for public availability that supports RL training on various modalities (video, text, and audio), various models (VILA and Qwen series), and even image and video generation models. On a single A100 node (8 GPUs), it supports RL training on hour-long videos (e.g., 3,600 frames / around 256k tokens).
Scaling Vision Pre-Training to 4K Resolution
Mar 25, 2025High-resolution perception of visual details is crucial for daily tasks. Current vision pre-training, however, is still limited to low resolutions (e.g., 378 x 378 pixels) due to the quadratic cost of processing larger images. We introduce PS3 that scales CLIP-style vision pre-training to 4K resolution with a near-constant cost. Instead of contrastive learning on global image representation, PS3 is pre-trained by selectively processing local regions and contrasting them with local detailed captions, enabling high-resolution representation learning with greatly reduced computational overhead. The pre-trained PS3 is able to both encode the global image at low resolution and selectively process local high-resolution regions based on their saliency or relevance to a text prompt. When applying PS3 to multi-modal LLM (MLLM), the resulting model, named VILA-HD, significantly improves high-resolution visual perception compared to baselines without high-resolution vision pre-training such as AnyRes and S^2 while using up to 4.3x fewer tokens. PS3 also unlocks appealing scaling properties of VILA-HD, including scaling up resolution for free and scaling up test-time compute for better performance. Compared to state of the arts, VILA-HD outperforms previous MLLMs such as NVILA and Qwen2-VL across multiple benchmarks and achieves better efficiency than latest token pruning approaches. Finally, we find current benchmarks do not require 4K-resolution perception, which motivates us to propose 4KPro, a new benchmark of image QA at 4K resolution, on which VILA-HD outperforms all previous MLLMs, including a 14.5% improvement over GPT-4o, and a 3.2% improvement and 2.96x speedup over Qwen2-VL.
NVILA: Efficient Frontier Visual Language Models
Dec 05, 2024
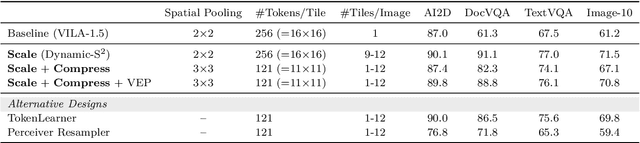
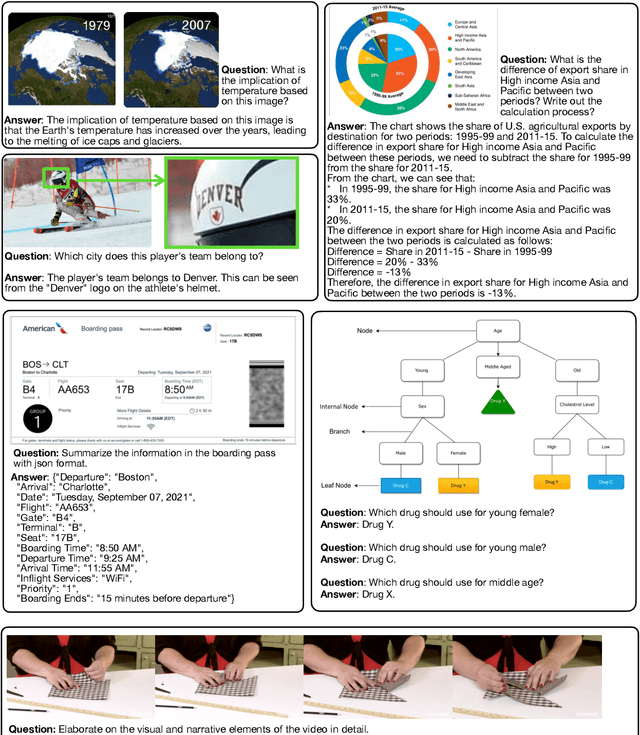
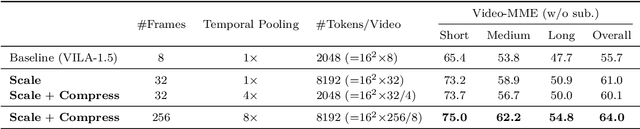
Visual language models (VLMs) have made significant advances in accuracy in recent years. However, their efficiency has received much less attention. This paper introduces NVILA, a family of open VLMs designed to optimize both efficiency and accuracy. Building on top of VILA, we improve its model architecture by first scaling up the spatial and temporal resolutions, and then compressing visual tokens. This "scale-then-compress" approach enables NVILA to efficiently process high-resolution images and long videos. We also conduct a systematic investigation to enhance the efficiency of NVILA throughout its entire lifecycle, from training and fine-tuning to deployment. NVILA matches or surpasses the accuracy of many leading open and proprietary VLMs across a wide range of image and video benchmarks. At the same time, it reduces training costs by 4.5X, fine-tuning memory usage by 3.4X, pre-filling latency by 1.6-2.2X, and decoding latency by 1.2-2.8X. We will soon make our code and models available to facilitate reproducibility.
LLARVA: Vision-Action Instruction Tuning Enhances Robot Learning
Jun 17, 2024



In recent years, instruction-tuned Large Multimodal Models (LMMs) have been successful at several tasks, including image captioning and visual question answering; yet leveraging these models remains an open question for robotics. Prior LMMs for robotics applications have been extensively trained on language and action data, but their ability to generalize in different settings has often been less than desired. To address this, we introduce LLARVA, a model trained with a novel instruction tuning method that leverages structured prompts to unify a range of robotic learning tasks, scenarios, and environments. Additionally, we show that predicting intermediate 2-D representations, which we refer to as "visual traces", can help further align vision and action spaces for robot learning. We generate 8.5M image-visual trace pairs from the Open X-Embodiment dataset in order to pre-train our model, and we evaluate on 12 different tasks in the RLBench simulator as well as a physical Franka Emika Panda 7-DoF robot. Our experiments yield strong performance, demonstrating that LLARVA - using 2-D and language representations - performs well compared to several contemporary baselines, and can generalize across various robot environments and configurations.
When Do We Not Need Larger Vision Models?
Mar 19, 2024Scaling up the size of vision models has been the de facto standard to obtain more powerful visual representations. In this work, we discuss the point beyond which larger vision models are not necessary. First, we demonstrate the power of Scaling on Scales (S$^2$), whereby a pre-trained and frozen smaller vision model (e.g., ViT-B or ViT-L), run over multiple image scales, can outperform larger models (e.g., ViT-H or ViT-G) on classification, segmentation, depth estimation, Multimodal LLM (MLLM) benchmarks, and robotic manipulation. Notably, S$^2$ achieves state-of-the-art performance in detailed understanding of MLLM on the V* benchmark, surpassing models such as GPT-4V. We examine the conditions under which S$^2$ is a preferred scaling approach compared to scaling on model size. While larger models have the advantage of better generalization on hard examples, we show that features of larger vision models can be well approximated by those of multi-scale smaller models. This suggests most, if not all, of the representations learned by current large pre-trained models can also be obtained from multi-scale smaller models. Our results show that a multi-scale smaller model has comparable learning capacity to a larger model, and pre-training smaller models with S$^2$ can match or even exceed the advantage of larger models. We release a Python package that can apply S$^2$ on any vision model with one line of code: https://github.com/bfshi/scaling_on_scales.
Humanoid Locomotion as Next Token Prediction
Feb 29, 2024



We cast real-world humanoid control as a next token prediction problem, akin to predicting the next word in language. Our model is a causal transformer trained via autoregressive prediction of sensorimotor trajectories. To account for the multi-modal nature of the data, we perform prediction in a modality-aligned way, and for each input token predict the next token from the same modality. This general formulation enables us to leverage data with missing modalities, like video trajectories without actions. We train our model on a collection of simulated trajectories coming from prior neural network policies, model-based controllers, motion capture data, and YouTube videos of humans. We show that our model enables a full-sized humanoid to walk in San Francisco zero-shot. Our model can transfer to the real world even when trained on only 27 hours of walking data, and can generalize to commands not seen during training like walking backward. These findings suggest a promising path toward learning challenging real-world control tasks by generative modeling of sensorimotor trajectories.
Rethinking Patch Dependence for Masked Autoencoders
Jan 25, 2024



In this work, we re-examine inter-patch dependencies in the decoding mechanism of masked autoencoders (MAE). We decompose this decoding mechanism for masked patch reconstruction in MAE into self-attention and cross-attention. Our investigations suggest that self-attention between mask patches is not essential for learning good representations. To this end, we propose a novel pretraining framework: Cross-Attention Masked Autoencoders (CrossMAE). CrossMAE's decoder leverages only cross-attention between masked and visible tokens, with no degradation in downstream performance. This design also enables decoding only a small subset of mask tokens, boosting efficiency. Furthermore, each decoder block can now leverage different encoder features, resulting in improved representation learning. CrossMAE matches MAE in performance with 2.5 to 3.7$\times$ less decoding compute. It also surpasses MAE on ImageNet classification and COCO instance segmentation under the same compute. Code and models: https://crossmae.github.io
Recursive Visual Programming
Dec 04, 2023



Visual Programming (VP) has emerged as a powerful framework for Visual Question Answering (VQA). By generating and executing bespoke code for each question, these methods demonstrate impressive compositional and reasoning capabilities, especially in few-shot and zero-shot scenarios. However, existing VP methods generate all code in a single function, resulting in code that is suboptimal in terms of both accuracy and interpretability. Inspired by human coding practices, we propose Recursive Visual Programming (RVP), which simplifies generated routines, provides more efficient problem solving, and can manage more complex data structures. RVP is inspired by human coding practices and approaches VQA tasks with an iterative recursive code generation approach, allowing decomposition of complicated problems into smaller parts. Notably, RVP is capable of dynamic type assignment, i.e., as the system recursively generates a new piece of code, it autonomously determines the appropriate return type and crafts the requisite code to generate that output. We show RVP's efficacy through extensive experiments on benchmarks including VSR, COVR, GQA, and NextQA, underscoring the value of adopting human-like recursive and modular programming techniques for solving VQA tasks through coding.
LLM-grounded Video Diffusion Models
Oct 02, 2023Text-conditioned diffusion models have emerged as a promising tool for neural video generation. However, current models still struggle with intricate spatiotemporal prompts and often generate restricted or incorrect motion (e.g., even lacking the ability to be prompted for objects moving from left to right). To address these limitations, we introduce LLM-grounded Video Diffusion (LVD). Instead of directly generating videos from the text inputs, LVD first leverages a large language model (LLM) to generate dynamic scene layouts based on the text inputs and subsequently uses the generated layouts to guide a diffusion model for video generation. We show that LLMs are able to understand complex spatiotemporal dynamics from text alone and generate layouts that align closely with both the prompts and the object motion patterns typically observed in the real world. We then propose to guide video diffusion models with these layouts by adjusting the attention maps. Our approach is training-free and can be integrated into any video diffusion model that admits classifier guidance. Our results demonstrate that LVD significantly outperforms its base video diffusion model and several strong baseline methods in faithfully generating videos with the desired attributes and motion patterns.