 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNot All Skills Help: Measuring and Repairing Agent Knowledge
Jun 13, 2026LLM agents can improve without weight updates by accumulating natural-language skills from experience, but current systems entrust every decision about which skills to keep and how to apply them to LLM judgment alone. We argue that this conflates two distinct roles: generating a skill from experience is a creative act that judgment handles well, while deciding whether that skill actually helps requires empirical evidence across many tasks. Measuring per-skill causal contributions via randomized masking, we find that skill libraries exhibit pervasive causal heterogeneity: individual skills routinely help on some task types while hurting on others, yet their opposing effects cancel in aggregate, making them invisible to global curation methods. We propose ASSAY, a framework that separates generation from curation: it computes a per-skill causal attribution on a small development set, restructures the library offline, and suppresses skills with negative predicted effect for each test task. Across seven base models spanning four providers and two benchmarks (AppWorld and tau-bench), ASSAY consistently improves over prior skill-curation approaches. On AppWorld's hardest split, DeepSeek-V3 achieves 69.3% task-goal completion (47.4% relative improvement), a new state of the art among all published methods including weight-tuned approaches. On tau-bench retail, GPT-4.1 improves by 8.7% relative, advancing past o4-mini, o1, and GPT-4.5 on the public leaderboard without any weight modification. Ablation traces the dominant gain to per-task masking, confirming that the bottleneck is matching skills to tasks at inference time, not removing bad skills globally. Code is available at https://github.com/aiming-lab/assay.
STORM: Internalized Modeling for Spatial-Temporal Reasoning in Video-Language Models
May 25, 2026Many video reasoning tasks require tracking motion, temporal order, and evolving visual states across frames. Existing methods built on large vision-language models (LVLMs) often address this challenge by externalizing reasoning through textual chain-of-thought (CoT), keyframe selection, repeated frame reinsertion, or external tool use. While effective, such pipelines increase inference-time latency and engineering complexity, and they force temporal-visual evidence to be serialized into text or repeatedly re-encoded from frames. Inspired by the intuition that visual reasoning can occur implicitly before verbalization, we propose STORMS (Spatial-Temporal reasOning via inteRnalized Modeling), a two-stage framework that teaches LVLMs to reason through bounded continuous latent trajectories instead of explicit textual CoT. In Stage I, STORMS aligns latent tokens with thought-video representations derived from generated videos, grounding the latent states in dynamic visual evidence. In Stage II, the model is further trained with answer-only supervision, encouraging the reasoning process to be internalized without step-by-step annotations. Generated thought videos are used only during training; at inference, STORMS performs a bounded latent rollout without regenerating videos, reinserting frames, or invoking external visual tools. Experiments on VideoMME, MVBench, TempCompass, and MMVU show that STORMS improves video reasoning accuracy while substantially reducing inference overhead compared with tool or video-generation-based reasoning pipelines.
Nemotron 3 Nano Omni: Efficient and Open Multimodal Intelligence
Apr 27, 2026We introduce Nemotron 3 Nano Omni, the latest model in the Nemotron multimodal series and the first to natively support audio inputs alongside text, images, and video. Nemotron 3 Nano Omni delivers consistent accuracy improvements over its predecessor, Nemotron Nano V2 VL, across all modalities, enabled by advances in architecture, training data and recipes. In particular, Nemotron 3 delivers leading results in real-world document understanding, long audio-video comprehension, and agentic computer use. Built on the highly efficient Nemotron 3 Nano 30B-A3B backbone, Nemotron 3 Nano Omni further incorporates innovative multimodal token-reduction techniques to deliver substantially lower inference latency and higher throughput than other models of similar size. We are releasing model checkpoints in BF16, FP8, and FP4 formats, along with portions of the training data and codebase to facilitate further research and development.
MM-Zero: Self-Evolving Multi-Model Vision Language Models From Zero Data
Mar 10, 2026Self-evolving has emerged as a key paradigm for improving foundational models such as Large Language Models (LLMs) and Vision Language Models (VLMs) with minimal human intervention. While recent approaches have demonstrated that LLM agents can self-evolve from scratch with little to no data, VLMs introduce an additional visual modality that typically requires at least some seed data, such as images, to bootstrap the self-evolution process. In this work, we present Multi-model Multimodal Zero (MM-Zero), the first RL-based framework to achieve zero-data self-evolution for VLM reasoning. Moving beyond prior dual-role (Proposer and Solver) setups, MM-Zero introduces a multi-role self-evolving training framework comprising three specialized roles: a Proposer that generates abstract visual concepts and formulates questions; a Coder that translates these concepts into executable code (e.g., Python, SVG) to render visual images; and a Solver that performs multimodal reasoning over the generated visual content. All three roles are initialized from the same base model and trained using Group Relative Policy Optimization (GRPO), with carefully designed reward mechanisms that integrate execution feedback, visual verification, and difficulty balancing. Our experiments show that MM-Zero improves VLM reasoning performance across a wide range of multimodal benchmarks. MM-Zero establishes a scalable path toward self-evolving multi-model systems for multimodal models, extending the frontier of self-improvement beyond the conventional two-model paradigm.
Towards Multimodal Lifelong Understanding: A Dataset and Agentic Baseline
Mar 05, 2026While datasets for video understanding have scaled to hour-long durations, they typically consist of densely concatenated clips that differ from natural, unscripted daily life. To bridge this gap, we introduce MM-Lifelong, a dataset designed for Multimodal Lifelong Understanding. Comprising 181.1 hours of footage, it is structured across Day, Week, and Month scales to capture varying temporal densities. Extensive evaluations reveal two critical failure modes in current paradigms: end-to-end MLLMs suffer from a Working Memory Bottleneck due to context saturation, while representative agentic baselines experience Global Localization Collapse when navigating sparse, month-long timelines. To address this, we propose the Recursive Multimodal Agent (ReMA), which employs dynamic memory management to iteratively update a recursive belief state, significantly outperforming existing methods. Finally, we establish dataset splits designed to isolate temporal and domain biases, providing a rigorous foundation for future research in supervised learning and out-of-distribution generalization.
First Frame Is the Place to Go for Video Content Customization
Nov 19, 2025What role does the first frame play in video generation models? Traditionally, it's viewed as the spatial-temporal starting point of a video, merely a seed for subsequent animation. In this work, we reveal a fundamentally different perspective: video models implicitly treat the first frame as a conceptual memory buffer that stores visual entities for later reuse during generation. Leveraging this insight, we show that it's possible to achieve robust and generalized video content customization in diverse scenarios, using only 20-50 training examples without architectural changes or large-scale finetuning. This unveils a powerful, overlooked capability of video generation models for reference-based video customization.
NVIDIA Nemotron Nano V2 VL
Nov 07, 2025We introduce Nemotron Nano V2 VL, the latest model of the Nemotron vision-language series designed for strong real-world document understanding, long video comprehension, and reasoning tasks. Nemotron Nano V2 VL delivers significant improvements over our previous model, Llama-3.1-Nemotron-Nano-VL-8B, across all vision and text domains through major enhancements in model architecture, datasets, and training recipes. Nemotron Nano V2 VL builds on Nemotron Nano V2, a hybrid Mamba-Transformer LLM, and innovative token reduction techniques to achieve higher inference throughput in long document and video scenarios. We are releasing model checkpoints in BF16, FP8, and FP4 formats and sharing large parts of our datasets, recipes and training code.
Self-Rewarding Vision-Language Model via Reasoning Decomposition
Aug 27, 2025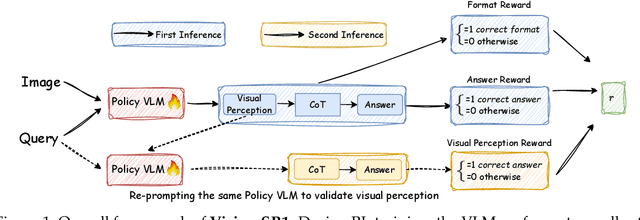
Vision-Language Models (VLMs) often suffer from visual hallucinations, saying things that are not actually in the image, and language shortcuts, where they skip the visual part and just rely on text priors. These issues arise because most post-training methods for VLMs rely on simple verifiable answer matching and supervise only final outputs, leaving intermediate visual reasoning without explicit guidance. As a result, VLMs receive sparse visual signals and often learn to prioritize language-based reasoning over visual perception. To mitigate this, some existing methods add visual supervision using human annotations or distilled labels from external large models. However, human annotations are labor-intensive and costly, and because external signals cannot adapt to the evolving policy, they cause distributional shifts that can lead to reward hacking. In this paper, we introduce Vision-SR1, a self-rewarding method that improves visual reasoning without relying on external visual supervisions via reinforcement learning. Vision-SR1 decomposes VLM reasoning into two stages: visual perception and language reasoning. The model is first prompted to produce self-contained visual perceptions that are sufficient to answer the question without referring back the input image. To validate this self-containment, the same VLM model is then re-prompted to perform language reasoning using only the generated perception as input to compute reward. This self-reward is combined with supervision on final outputs, providing a balanced training signal that strengthens both visual perception and language reasoning. Our experiments demonstrate that Vision-SR1 improves visual reasoning, mitigates visual hallucinations, and reduces reliance on language shortcuts across diverse vision-language tasks.
ColorBench: Can VLMs See and Understand the Colorful World? A Comprehensive Benchmark for Color Perception, Reasoning, and Robustness
Apr 10, 2025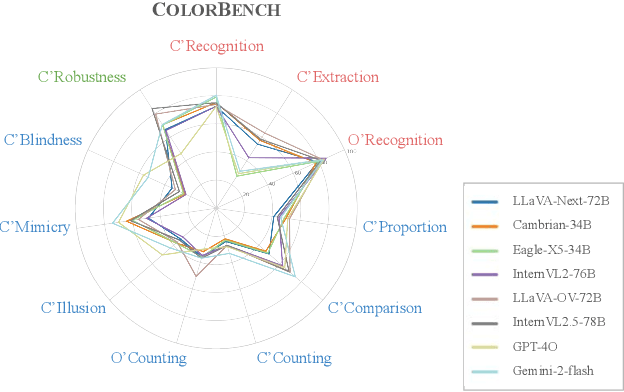
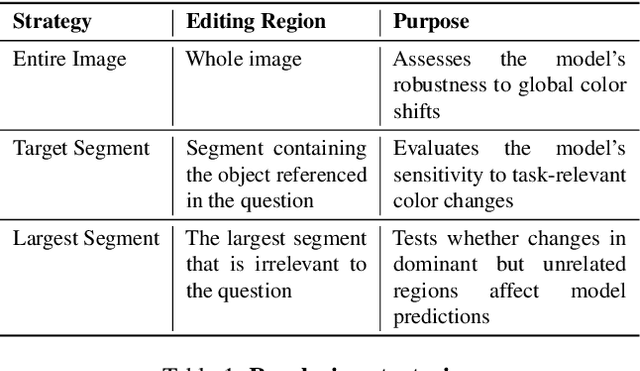
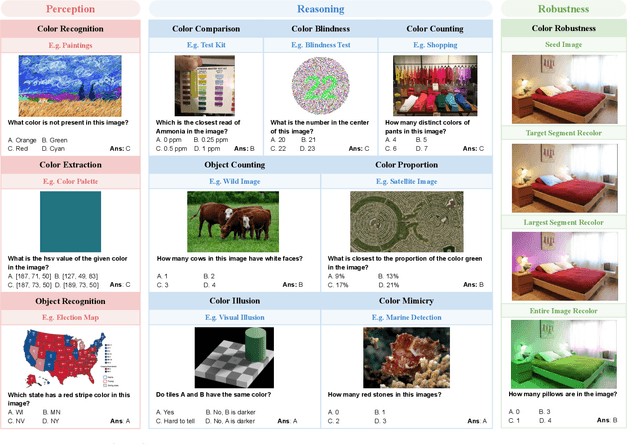
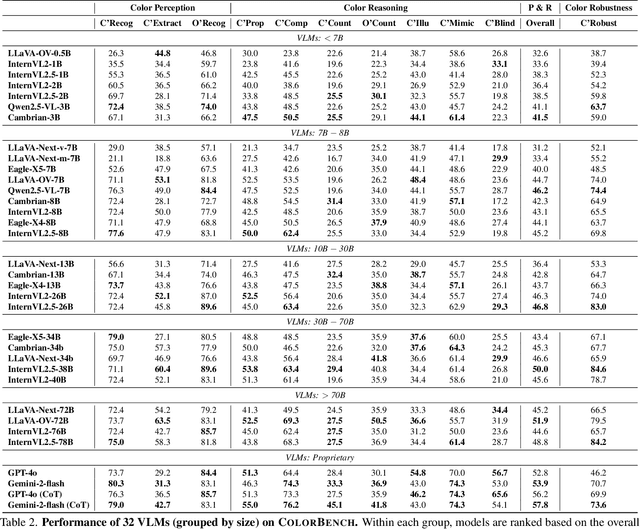
Color plays an important role in human perception and usually provides critical clues in visual reasoning. However, it is unclear whether and how vision-language models (VLMs) can perceive, understand, and leverage color as humans. This paper introduces ColorBench, an innovative benchmark meticulously crafted to assess the capabilities of VLMs in color understanding, including color perception, reasoning, and robustness. By curating a suite of diverse test scenarios, with grounding in real applications, ColorBench evaluates how these models perceive colors, infer meanings from color-based cues, and maintain consistent performance under varying color transformations. Through an extensive evaluation of 32 VLMs with varying language models and vision encoders, our paper reveals some undiscovered findings: (i) The scaling law (larger models are better) still holds on ColorBench, while the language model plays a more important role than the vision encoder. (ii) However, the performance gaps across models are relatively small, indicating that color understanding has been largely neglected by existing VLMs. (iii) CoT reasoning improves color understanding accuracies and robustness, though they are vision-centric tasks. (iv) Color clues are indeed leveraged by VLMs on ColorBench but they can also mislead models in some tasks. These findings highlight the critical limitations of current VLMs and underscore the need to enhance color comprehension. Our ColorBenchcan serve as a foundational tool for advancing the study of human-level color understanding of multimodal AI.
Nemotron-H: A Family of Accurate and Efficient Hybrid Mamba-Transformer Models
Apr 10, 2025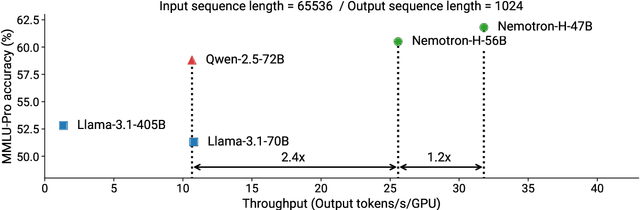

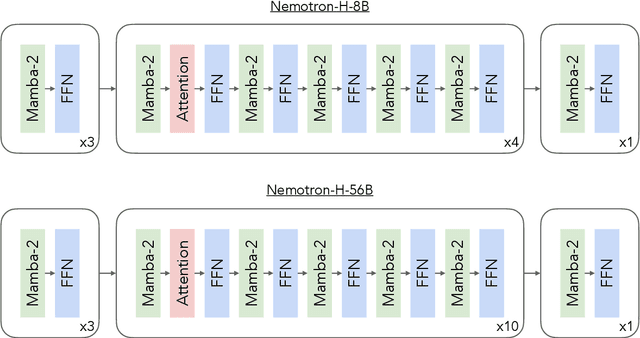
As inference-time scaling becomes critical for enhanced reasoning capabilities, it is increasingly becoming important to build models that are efficient to infer. We introduce Nemotron-H, a family of 8B and 56B/47B hybrid Mamba-Transformer models designed to reduce inference cost for a given accuracy level. To achieve this goal, we replace the majority of self-attention layers in the common Transformer model architecture with Mamba layers that perform constant computation and require constant memory per generated token. We show that Nemotron-H models offer either better or on-par accuracy compared to other similarly-sized state-of-the-art open-sourced Transformer models (e.g., Qwen-2.5-7B/72B and Llama-3.1-8B/70B), while being up to 3$\times$ faster at inference. To further increase inference speed and reduce the memory required at inference time, we created Nemotron-H-47B-Base from the 56B model using a new compression via pruning and distillation technique called MiniPuzzle. Nemotron-H-47B-Base achieves similar accuracy to the 56B model, but is 20% faster to infer. In addition, we introduce an FP8-based training recipe and show that it can achieve on par results with BF16-based training. This recipe is used to train the 56B model. All Nemotron-H models will be released, with support in Hugging Face, NeMo, and Megatron-LM.