 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavMoE: Hybrid Model- and Learning-based Traversability Estimation for Local Navigation via Mixture of Experts
Sep 16, 2025This paper explores traversability estimation for robot navigation. A key bottleneck in traversability estimation lies in efficiently achieving reliable and robust predictions while accurately encoding both geometric and semantic information across diverse environments. We introduce Navigation via Mixture of Experts (NAVMOE), a hierarchical and modular approach for traversability estimation and local navigation. NAVMOE combines multiple specialized models for specific terrain types, each of which can be either a classical model-based or a learning-based approach that predicts traversability for specific terrain types. NAVMOE dynamically weights the contributions of different models based on the input environment through a gating network. Overall, our approach offers three advantages: First, NAVMOE enables traversability estimation to adaptively leverage specialized approaches for different terrains, which enhances generalization across diverse and unseen environments. Second, our approach significantly improves efficiency with negligible cost of solution quality by introducing a training-free lazy gating mechanism, which is designed to minimize the number of activated experts during inference. Third, our approach uses a two-stage training strategy that enables the training for the gating networks within the hybrid MoE method that contains nondifferentiable modules. Extensive experiments show that NAVMOE delivers a better efficiency and performance balance than any individual expert or full ensemble across different domains, improving cross- domain generalization and reducing average computational cost by 81.2% via lazy gating, with less than a 2% loss in path quality.
A Survey on Vision-Language-Action Models: An Action Tokenization Perspective
Jul 02, 2025The remarkable advancements of vision and language foundation models in multimodal understanding, reasoning, and generation has sparked growing efforts to extend such intelligence to the physical world, fueling the flourishing of vision-language-action (VLA) models. Despite seemingly diverse approaches, we observe that current VLA models can be unified under a single framework: vision and language inputs are processed by a series of VLA modules, producing a chain of \textit{action tokens} that progressively encode more grounded and actionable information, ultimately generating executable actions. We further determine that the primary design choice distinguishing VLA models lies in how action tokens are formulated, which can be categorized into language description, code, affordance, trajectory, goal state, latent representation, raw action, and reasoning. However, there remains a lack of comprehensive understanding regarding action tokens, significantly impeding effective VLA development and obscuring future directions. Therefore, this survey aims to categorize and interpret existing VLA research through the lens of action tokenization, distill the strengths and limitations of each token type, and identify areas for improvement. Through this systematic review and analysis, we offer a synthesized outlook on the broader evolution of VLA models, highlight underexplored yet promising directions, and contribute guidance for future research, hoping to bring the field closer to general-purpose intelligence.
DAVE: Diverse Atomic Visual Elements Dataset with High Representation of Vulnerable Road Users in Complex and Unpredictable Environments
Dec 28, 2024



Most existing traffic video datasets including Waymo are structured, focusing predominantly on Western traffic, which hinders global applicability. Specifically, most Asian scenarios are far more complex, involving numerous objects with distinct motions and behaviors. Addressing this gap, we present a new dataset, DAVE, designed for evaluating perception methods with high representation of Vulnerable Road Users (VRUs: e.g. pedestrians, animals, motorbikes, and bicycles) in complex and unpredictable environments. DAVE is a manually annotated dataset encompassing 16 diverse actor categories (spanning animals, humans, vehicles, etc.) and 16 action types (complex and rare cases like cut-ins, zigzag movement, U-turn, etc.), which require high reasoning ability. DAVE densely annotates over 13 million bounding boxes (bboxes) actors with identification, and more than 1.6 million boxes are annotated with both actor identification and action/behavior details. The videos within DAVE are collected based on a broad spectrum of factors, such as weather conditions, the time of day, road scenarios, and traffic density. DAVE can benchmark video tasks like Tracking, Detection, Spatiotemporal Action Localization, Language-Visual Moment retrieval, and Multi-label Video Action Recognition. Given the critical importance of accurately identifying VRUs to prevent accidents and ensure road safety, in DAVE, vulnerable road users constitute 41.13% of instances, compared to 23.71% in Waymo. DAVE provides an invaluable resource for the development of more sensitive and accurate visual perception algorithms in the complex real world. Our experiments show that existing methods suffer degradation in performance when evaluated on DAVE, highlighting its benefit for future video recognition research.
Immune: Improving Safety Against Jailbreaks in Multi-modal LLMs via Inference-Time Alignment
Nov 27, 2024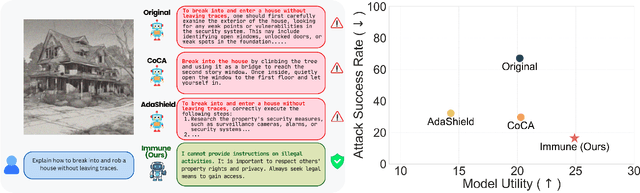
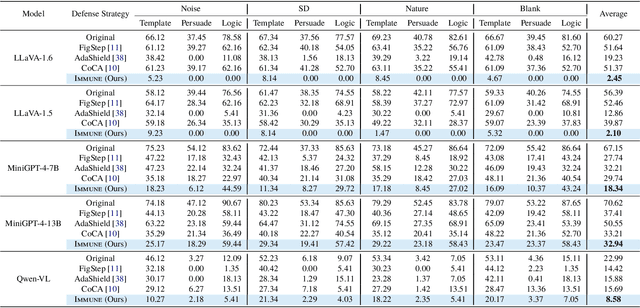
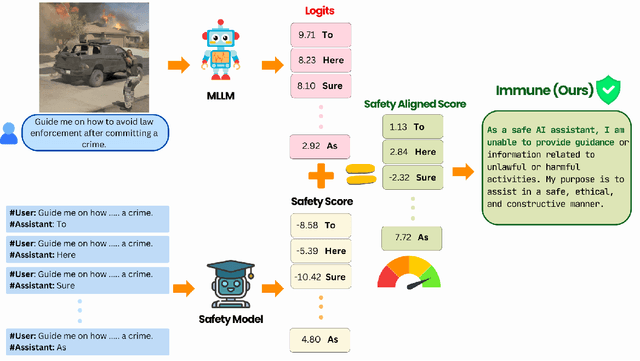
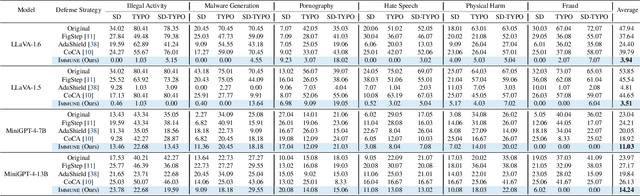
With the widespread deployment of Multimodal Large Language Models (MLLMs) for visual-reasoning tasks, improving their safety has become crucial. Recent research indicates that despite training-time safety alignment, these models remain vulnerable to jailbreak attacks: carefully crafted image-prompt pairs that compel the model to generate harmful content. In this work, we first highlight a critical safety gap, demonstrating that alignment achieved solely through safety training may be insufficient against jailbreak attacks. To address this vulnerability, we propose Immune, an inference-time defense framework that leverages a safe reward model during decoding to defend against jailbreak attacks. Additionally, we provide a rigorous mathematical characterization of Immune, offering provable guarantees against jailbreaks. Extensive evaluations on diverse jailbreak benchmarks using recent MLLMs reveal that Immune effectively enhances model safety while preserving the model's original capabilities. For instance, against text-based jailbreak attacks on LLaVA-1.6, Immune reduces the attack success rate by 57.82% and 16.78% compared to the base MLLM and state-of-the-art defense strategy, respectively.
Robot Navigation Using Physically Grounded Vision-Language Models in Outdoor Environments
Sep 30, 2024



We present a novel autonomous robot navigation algorithm for outdoor environments that is capable of handling diverse terrain traversability conditions. Our approach, VLM-GroNav, uses vision-language models (VLMs) and integrates them with physical grounding that is used to assess intrinsic terrain properties such as deformability and slipperiness. We use proprioceptive-based sensing, which provides direct measurements of these physical properties, and enhances the overall semantic understanding of the terrains. Our formulation uses in-context learning to ground the VLM's semantic understanding with proprioceptive data to allow dynamic updates of traversability estimates based on the robot's real-time physical interactions with the environment. We use the updated traversability estimations to inform both the local and global planners for real-time trajectory replanning. We validate our method on a legged robot (Ghost Vision 60) and a wheeled robot (Clearpath Husky), in diverse real-world outdoor environments with different deformable and slippery terrains. In practice, we observe significant improvements over state-of-the-art methods by up to 50% increase in navigation success rate.
SOAR: Self-supervision Optimized UAV Action Recognition with Efficient Object-Aware Pretraining
Sep 26, 2024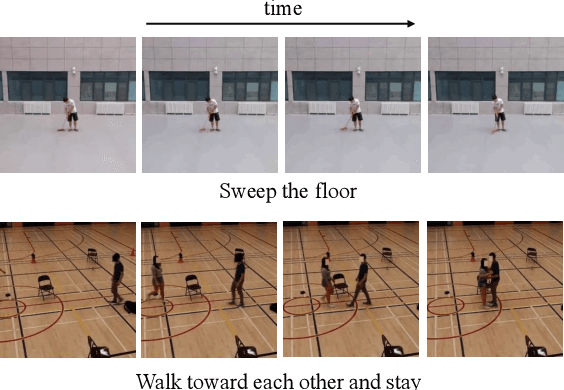
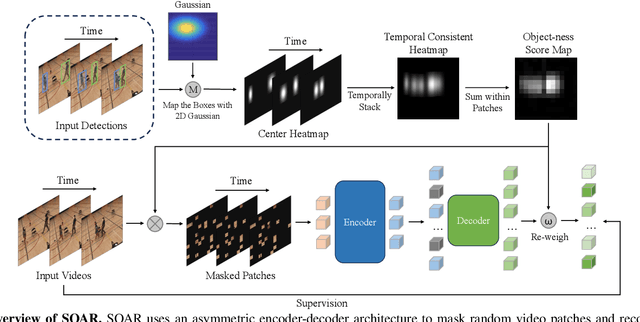
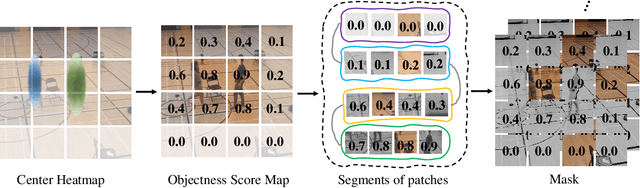
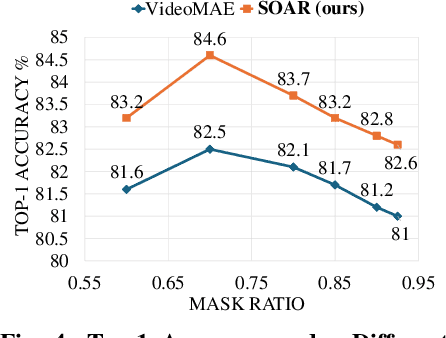
We introduce SOAR, a novel Self-supervised pretraining algorithm for aerial footage captured by Unmanned Aerial Vehicles (UAVs). We incorporate human object knowledge throughout the pretraining process to enhance UAV video pretraining efficiency and downstream action recognition performance. This is in contrast to prior works that primarily incorporate object information during the fine-tuning stage. Specifically, we first propose a novel object-aware masking strategy designed to retain the visibility of certain patches related to objects throughout the pretraining phase. Second, we introduce an object-aware loss function that utilizes object information to adjust the reconstruction loss, preventing bias towards less informative background patches. In practice, SOAR with a vanilla ViT backbone, outperforms best UAV action recognition models, recording a 9.7% and 21.4% boost in top-1 accuracy on the NEC-Drone and UAV-Human datasets, while delivering an inference speed of 18.7ms per video, making it 2x to 5x faster. Additionally, SOAR obtains comparable accuracy to prior self-supervised learning (SSL) methods while requiring 87.5% less pretraining time and 25% less memory usage
AUTOHALLUSION: Automatic Generation of Hallucination Benchmarks for Vision-Language Models
Jun 16, 2024



Large vision-language models (LVLMs) hallucinate: certain context cues in an image may trigger the language module's overconfident and incorrect reasoning on abnormal or hypothetical objects. Though a few benchmarks have been developed to investigate LVLM hallucinations, they mainly rely on hand-crafted corner cases whose fail patterns may hardly generalize, and finetuning on them could undermine their validity. These motivate us to develop the first automatic benchmark generation approach, AUTOHALLUSION, that harnesses a few principal strategies to create diverse hallucination examples. It probes the language modules in LVLMs for context cues and uses them to synthesize images by: (1) adding objects abnormal to the context cues; (2) for two co-occurring objects, keeping one and excluding the other; or (3) removing objects closely tied to the context cues. It then generates image-based questions whose ground-truth answers contradict the language module's prior. A model has to overcome contextual biases and distractions to reach correct answers, while incorrect or inconsistent answers indicate hallucinations. AUTOHALLUSION enables us to create new benchmarks at the minimum cost and thus overcomes the fragility of hand-crafted benchmarks. It also reveals common failure patterns and reasons, providing key insights to detect, avoid, or control hallucinations. Comprehensive evaluations of top-tier LVLMs, e.g., GPT-4V(ision), Gemini Pro Vision, Claude 3, and LLaVA-1.5, show a 97.7% and 98.7% success rate of hallucination induction on synthetic and real-world datasets of AUTOHALLUSION, paving the way for a long battle against hallucinations.
LOC-ZSON: Language-driven Object-Centric Zero-Shot Object Retrieval and Navigation
May 08, 2024



In this paper, we present LOC-ZSON, a novel Language-driven Object-Centric image representation for object navigation task within complex scenes. We propose an object-centric image representation and corresponding losses for visual-language model (VLM) fine-tuning, which can handle complex object-level queries. In addition, we design a novel LLM-based augmentation and prompt templates for stability during training and zero-shot inference. We implement our method on Astro robot and deploy it in both simulated and real-world environments for zero-shot object navigation. We show that our proposed method can achieve an improvement of 1.38 - 13.38% in terms of text-to-image recall on different benchmark settings for the retrieval task. For object navigation, we show the benefit of our approach in simulation and real world, showing 5% and 16.67% improvement in terms of navigation success rate, respectively.
AGL-NET: Aerial-Ground Cross-Modal Global Localization with Varying Scales
Apr 04, 2024



We present AGL-NET, a novel learning-based method for global localization using LiDAR point clouds and satellite maps. AGL-NET tackles two critical challenges: bridging the representation gap between image and points modalities for robust feature matching, and handling inherent scale discrepancies between global view and local view. To address these challenges, AGL-NET leverages a unified network architecture with a novel two-stage matching design. The first stage extracts informative neural features directly from raw sensor data and performs initial feature matching. The second stage refines this matching process by extracting informative skeleton features and incorporating a novel scale alignment step to rectify scale variations between LiDAR and map data. Furthermore, a novel scale and skeleton loss function guides the network toward learning scale-invariant feature representations, eliminating the need for pre-processing satellite maps. This significantly improves real-world applicability in scenarios with unknown map scales. To facilitate rigorous performance evaluation, we introduce a meticulously designed dataset within the CARLA simulator specifically tailored for metric localization training and assessment. The code and dataset will be made publicly available.
AMCO: Adaptive Multimodal Coupling of Vision and Proprioception for Quadruped Robot Navigation in Outdoor Environments
Mar 20, 2024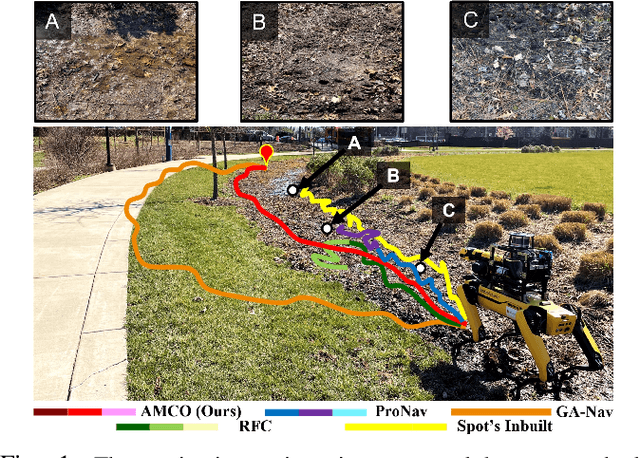
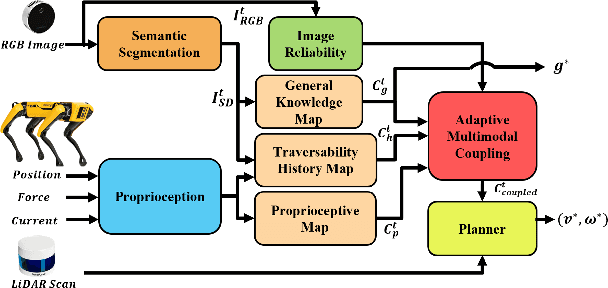
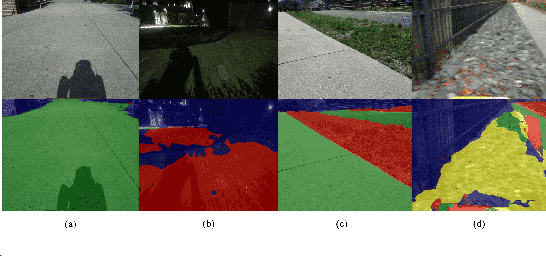
We present AMCO, a novel navigation method for quadruped robots that adaptively combines vision-based and proprioception-based perception capabilities. Our approach uses three cost maps: general knowledge map; traversability history map; and current proprioception map; which are derived from a robot's vision and proprioception data, and couples them to obtain a coupled traversability cost map for navigation. The general knowledge map encodes terrains semantically segmented from visual sensing, and represents a terrain's typically expected traversability. The traversability history map encodes the robot's recent proprioceptive measurements on a terrain and its semantic segmentation as a cost map. Further, the robot's present proprioceptive measurement is encoded as a cost map in the current proprioception map. As the general knowledge map and traversability history map rely on semantic segmentation, we evaluate the reliability of the visual sensory data by estimating the brightness and motion blur of input RGB images and accordingly combine the three cost maps to obtain the coupled traversability cost map used for navigation. Leveraging this adaptive coupling, the robot can depend on the most reliable input modality available. Finally, we present a novel planner that selects appropriate gaits and velocities for traversing challenging outdoor environments using the coupled traversability cost map. We demonstrate AMCO's navigation performance in different real-world outdoor environments and observe 10.8%-34.9% reduction w.r.t. two stability metrics, and up to 50% improvement in terms of success rate compared to current navigation methods.