 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Navigation Using Physically Grounded Vision-Language Models in Outdoor Environments
Sep 30, 2024



We present a novel autonomous robot navigation algorithm for outdoor environments that is capable of handling diverse terrain traversability conditions. Our approach, VLM-GroNav, uses vision-language models (VLMs) and integrates them with physical grounding that is used to assess intrinsic terrain properties such as deformability and slipperiness. We use proprioceptive-based sensing, which provides direct measurements of these physical properties, and enhances the overall semantic understanding of the terrains. Our formulation uses in-context learning to ground the VLM's semantic understanding with proprioceptive data to allow dynamic updates of traversability estimates based on the robot's real-time physical interactions with the environment. We use the updated traversability estimations to inform both the local and global planners for real-time trajectory replanning. We validate our method on a legged robot (Ghost Vision 60) and a wheeled robot (Clearpath Husky), in diverse real-world outdoor environments with different deformable and slippery terrains. In practice, we observe significant improvements over state-of-the-art methods by up to 50% increase in navigation success rate.
CROSS-GAiT: Cross-Attention-Based Multimodal Representation Fusion for Parametric Gait Adaptation in Complex Terrains
Sep 25, 2024



We present CROSS-GAiT, a novel algorithm for quadruped robots that uses Cross Attention to fuse terrain representations derived from visual and time-series inputs, including linear accelerations, angular velocities, and joint efforts. These fused representations are used to adjust the robot's step height and hip splay, enabling adaptive gaits that respond dynamically to varying terrain conditions. We generate these terrain representations by processing visual inputs through a masked Vision Transformer (ViT) encoder and time-series data through a dilated causal convolutional encoder. The cross-attention mechanism then selects and integrates the most relevant features from each modality, combining terrain characteristics with robot dynamics for better-informed gait adjustments. CROSS-GAiT uses the combined representation to dynamically adjust gait parameters in response to varying and unpredictable terrains. We train CROSS-GAiT on data from diverse terrains, including asphalt, concrete, brick pavements, grass, dense vegetation, pebbles, gravel, and sand. Our algorithm generalizes well and adapts to unseen environmental conditions, enhancing real-time navigation performance. CROSS-GAiT was implemented on a Ghost Robotics Vision 60 robot and extensively tested in complex terrains with high vegetation density, uneven/unstable surfaces, sand banks, deformable substrates, etc. We observe at least a 7.04% reduction in IMU energy density and a 27.3% reduction in total joint effort, which directly correlates with increased stability and reduced energy usage when compared to state-of-the-art methods. Furthermore, CROSS-GAiT demonstrates at least a 64.5% increase in success rate and a 4.91% reduction in time to reach the goal in four complex scenarios. Additionally, the learned representations perform 4.48% better than the state-of-the-art on a terrain classification task.
BehAV: Behavioral Rule Guided Autonomy Using VLMs for Robot Navigation in Outdoor Scenes
Sep 24, 2024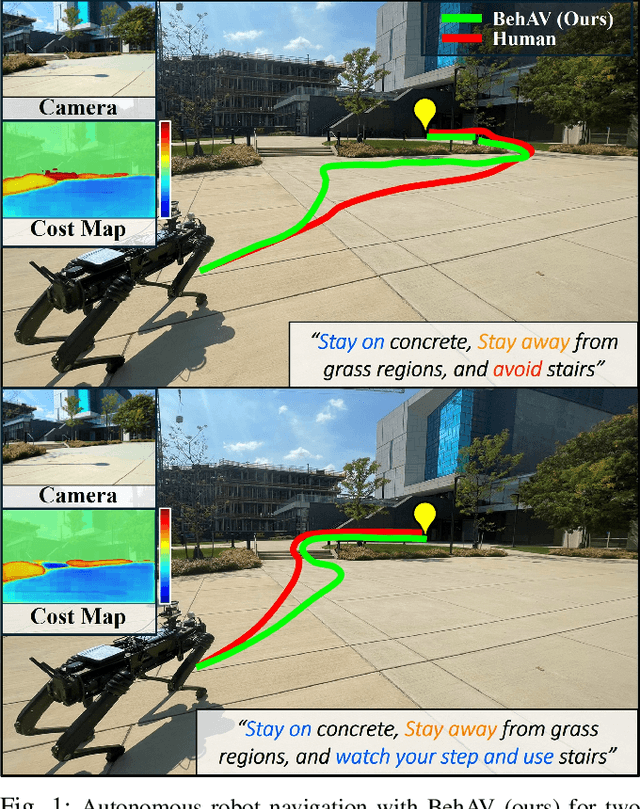
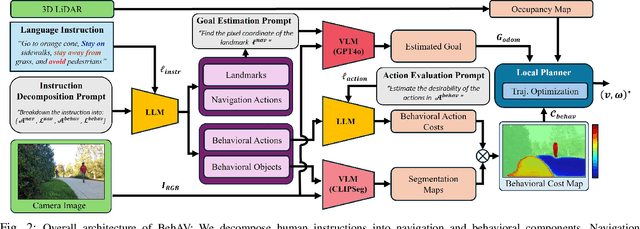

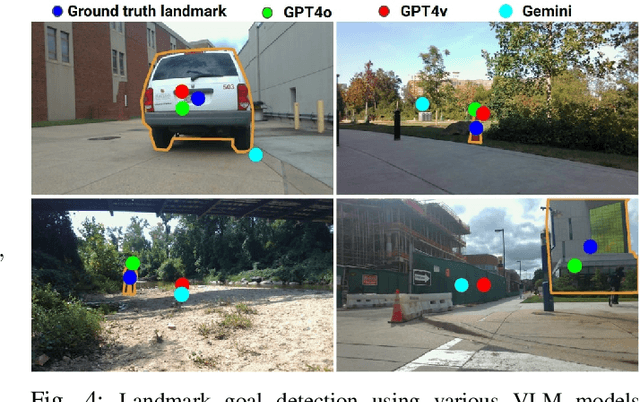
We present BehAV, a novel approach for autonomous robot navigation in outdoor scenes guided by human instructions and leveraging Vision Language Models (VLMs). Our method interprets human commands using a Large Language Model (LLM) and categorizes the instructions into navigation and behavioral guidelines. Navigation guidelines consist of directional commands (e.g., "move forward until") and associated landmarks (e.g., "the building with blue windows"), while behavioral guidelines encompass regulatory actions (e.g., "stay on") and their corresponding objects (e.g., "pavements"). We use VLMs for their zero-shot scene understanding capabilities to estimate landmark locations from RGB images for robot navigation. Further, we introduce a novel scene representation that utilizes VLMs to ground behavioral rules into a behavioral cost map. This cost map encodes the presence of behavioral objects within the scene and assigns costs based on their regulatory actions. The behavioral cost map is integrated with a LiDAR-based occupancy map for navigation. To navigate outdoor scenes while adhering to the instructed behaviors, we present an unconstrained Model Predictive Control (MPC)-based planner that prioritizes both reaching landmarks and following behavioral guidelines. We evaluate the performance of BehAV on a quadruped robot across diverse real-world scenarios, demonstrating a 22.49% improvement in alignment with human-teleoperated actions, as measured by Frechet distance, and achieving a 40% higher navigation success rate compared to state-of-the-art methods.
PiP-X: Online feedback motion planning/replanning in dynamic environments using invariant funnels
Feb 01, 2022
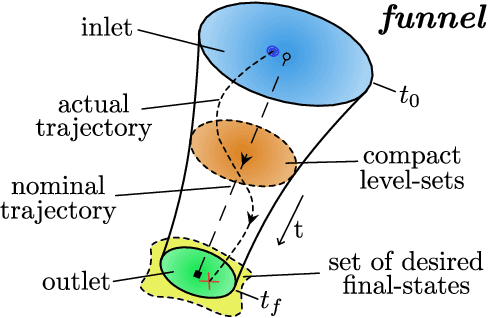

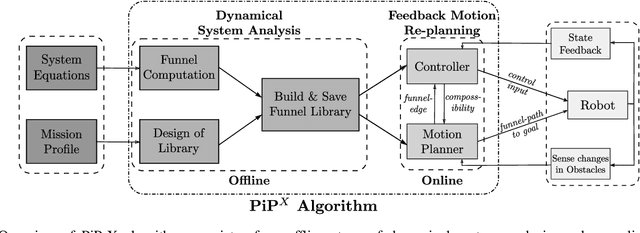
Computing kinodynamically feasible motion plans and repairing them on-the-fly as the environment changes is a challenging, yet relevant problem in robot-navigation. We propose a novel online single-query sampling-based motion re-planning algorithm - PiP-X, using finite-time invariant sets - funnels. We combine concepts from sampling-based methods, nonlinear systems analysis and control theory to create a single framework that enables feedback motion re-planning for any general nonlinear dynamical system in dynamic workspaces. A volumetric funnel-graph is constructed using sampling-based methods, and an optimal funnel-path from robot configuration to a desired goal region is then determined by computing the shortest-path subtree in it. Analysing and formally quantifying the stability of trajectories using Lyapunov level-set theory ensures kinodynamic feasibility and guaranteed set-invariance of the solution-paths. The use of incremental search techniques and a pre-computed library of motion-primitives ensure that our method can be used for quick online rewiring of controllable motion plans in densely cluttered and dynamic environments. We represent traversability and sequencibility of trajectories together in the form of an augmented directed-graph, helping us leverage discrete graph-based replanning algorithms to efficiently recompute feasible and controllable motion plans that are volumetric in nature. We validate our approach on a simulated 6DOF quadrotor platform in a variety of scenarios within a maze and random forest environment. From repeated experiments, we analyse the performance in terms of algorithm-success and length of traversed-trajectory.