 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Barrier Functions via Minkowski Operations for Safe Navigation among Polytopic Sets
Apr 01, 2025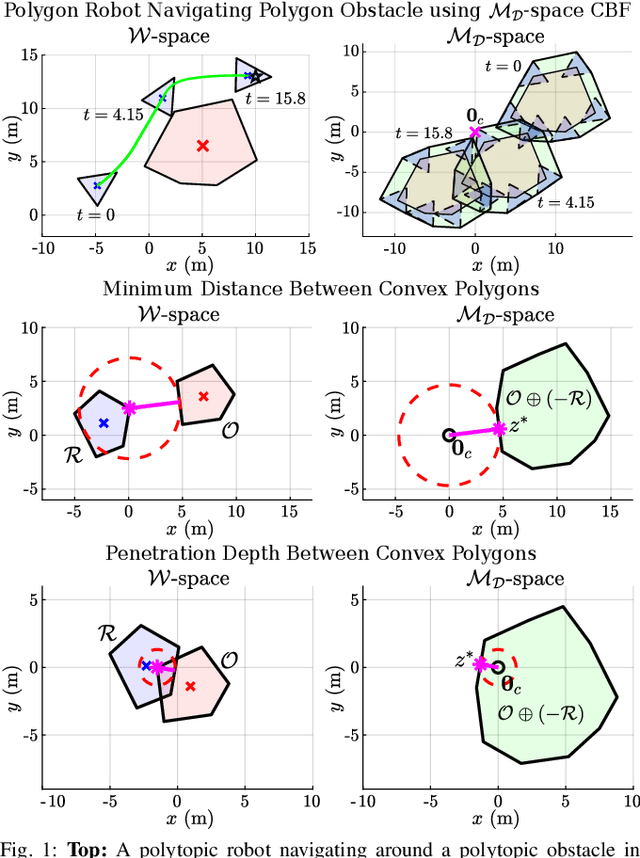
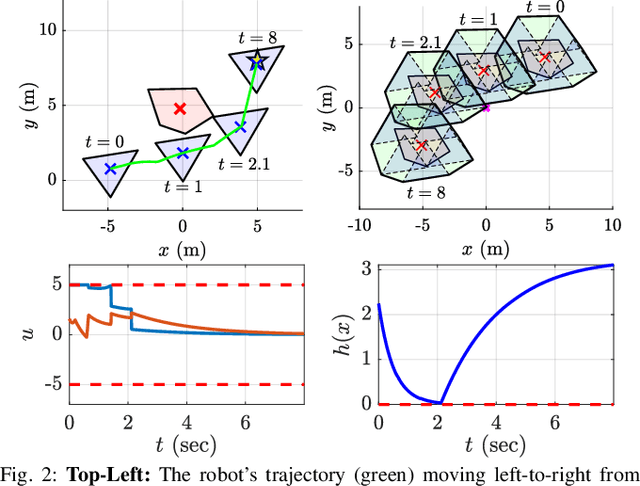
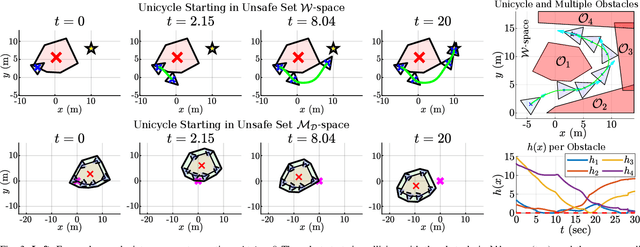
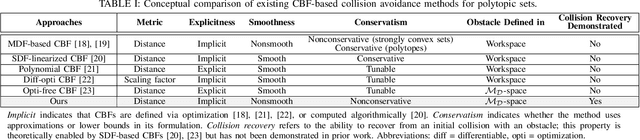
Safely navigating around obstacles while respecting the dynamics, control, and geometry of the underlying system is a key challenge in robotics. Control Barrier Functions (CBFs) generate safe control policies by considering system dynamics and geometry when calculating safe forward-invariant sets. Existing CBF-based methods often rely on conservative shape approximations, like spheres or ellipsoids, which have explicit and differentiable distance functions. In this paper, we propose an optimization-defined CBF that directly considers the exact Signed Distance Function (SDF) between a polytopic robot and polytopic obstacles. Inspired by the Gilbert-Johnson-Keerthi (GJK) algorithm, we formulate both (i) minimum distance and (ii) penetration depth between polytopic sets as convex optimization problems in the space of Minkowski difference operations (the MD-space). Convenient geometric properties of the MD-space enable the derivatives of implicit SDF between two polytopes to be computed via differentiable optimization. We demonstrate the proposed framework in three scenarios including pure translation, initialization inside an unsafe set, and multi-obstacle avoidance. These three scenarios highlight the generation of a non-conservative maneuver, a recovery after starting in collision, and the consideration of multiple obstacles via pairwise CBF constraint, respectively.
Path-Based Sensors: Will the Knowledge of Correlation in Random Variables Accelerate Information Gathering?
May 11, 2023



Effective communication is crucial for deploying robots in mission-specific tasks, but inadequate or unreliable communication can greatly reduce mission efficacy, for example in search and rescue missions where communication-denied conditions may occur. In such missions, robots are deployed to locate targets, such as human survivors, but they might get trapped at hazardous locations, such as in a trapping pit or by debris. Thus, the information the robot collected is lost owing to the lack of communication. In our prior work, we developed the notion of a path-based sensor. A path-based sensor detects whether or not an event has occurred along a particular path, but it does not provide the exact location of the event. Such path-based sensor observations are well-suited to communication-denied environments, and various studies have explored methods to improve information gathering in such settings. In some missions it is typical for target elements to be in close proximity to hazardous factors that hinder the information-gathering process. In this study, we examine a similar scenario and conduct experiments to determine if additional knowledge about the correlation between hazards and targets improves the efficiency of information gathering. To incorporate this knowledge, we utilize a Bayesian network representation of domain knowledge and develop an algorithm based on this representation. Our empirical investigation reveals that such additional information on correlation is beneficial only in environments with moderate hazard lethality, suggesting that while knowledge of correlation helps, further research and development is necessary for optimal outcomes.
Control and Dynamic Motion Planning for a Hybrid Air-Underwater Quadrotor: Minimizing Energy Use in a Flooded Cave Environment
Jan 03, 2023



We present a dynamic path planning algorithm to navigate an amphibious rotor craft through a concave time-invariant obstacle field while attempting to minimize energy usage. We create a nonlinear quaternion state model that represents the rotor craft dynamics above and below the water. The 6 degree of freedom dynamics used within a layered architecture to generate motion paths for the vehicle to follow and the required control inputs. The rotor craft has a 3 dimensional map of its surroundings that is updated via limited range onboard sensor readings within the current medium (air or water). Path planning is done via PRM and D* Lite.
PiP-X: Online feedback motion planning/replanning in dynamic environments using invariant funnels
Feb 01, 2022
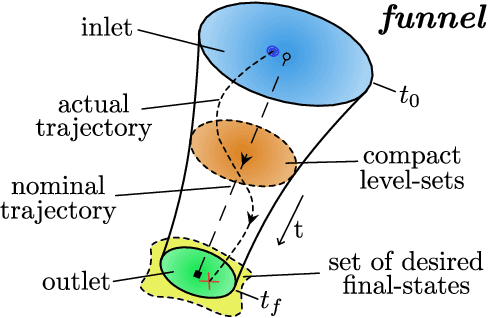

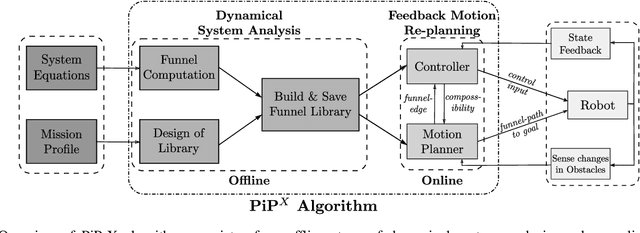
Computing kinodynamically feasible motion plans and repairing them on-the-fly as the environment changes is a challenging, yet relevant problem in robot-navigation. We propose a novel online single-query sampling-based motion re-planning algorithm - PiP-X, using finite-time invariant sets - funnels. We combine concepts from sampling-based methods, nonlinear systems analysis and control theory to create a single framework that enables feedback motion re-planning for any general nonlinear dynamical system in dynamic workspaces. A volumetric funnel-graph is constructed using sampling-based methods, and an optimal funnel-path from robot configuration to a desired goal region is then determined by computing the shortest-path subtree in it. Analysing and formally quantifying the stability of trajectories using Lyapunov level-set theory ensures kinodynamic feasibility and guaranteed set-invariance of the solution-paths. The use of incremental search techniques and a pre-computed library of motion-primitives ensure that our method can be used for quick online rewiring of controllable motion plans in densely cluttered and dynamic environments. We represent traversability and sequencibility of trajectories together in the form of an augmented directed-graph, helping us leverage discrete graph-based replanning algorithms to efficiently recompute feasible and controllable motion plans that are volumetric in nature. We validate our approach on a simulated 6DOF quadrotor platform in a variety of scenarios within a maze and random forest environment. From repeated experiments, we analyse the performance in terms of algorithm-success and length of traversed-trajectory.
Multi-Agent Coverage in Urban Environments
Aug 17, 2020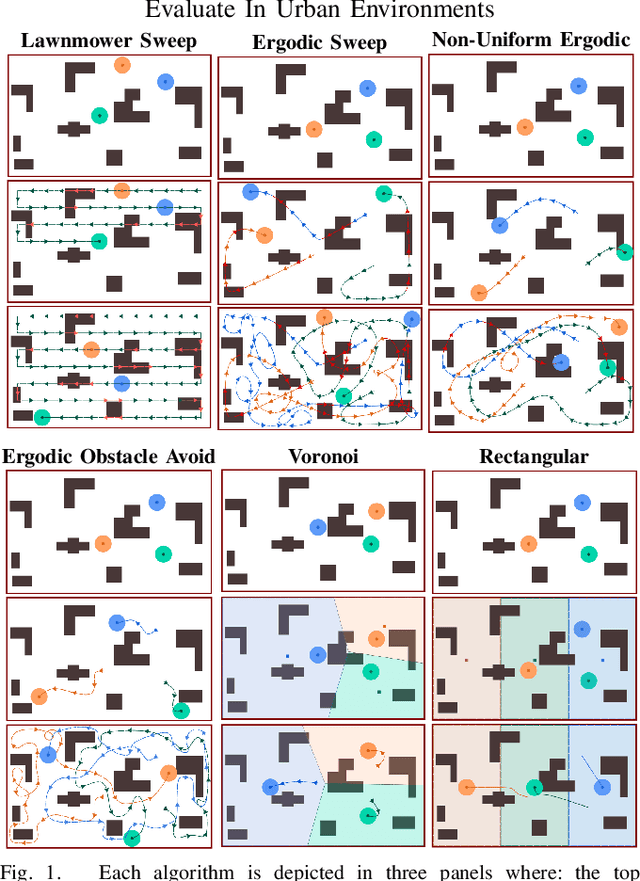
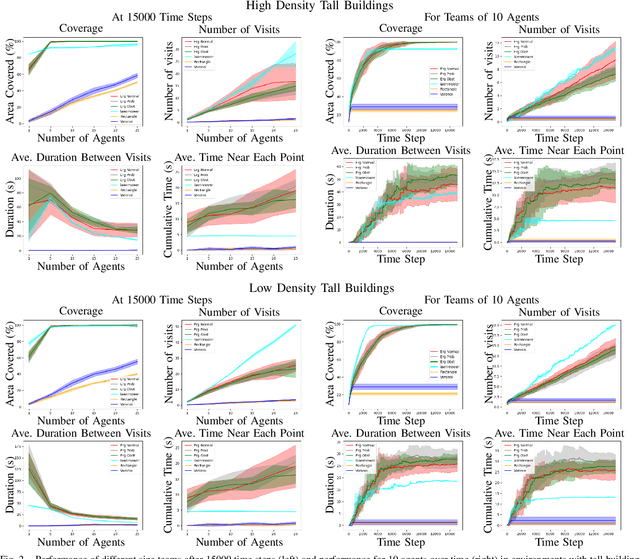
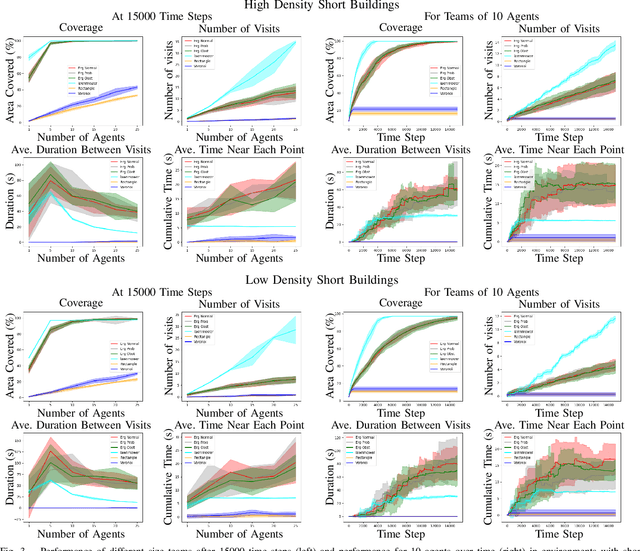
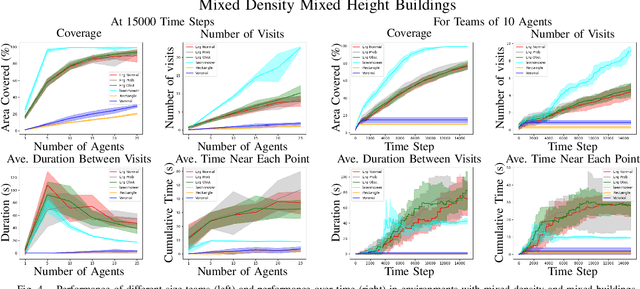
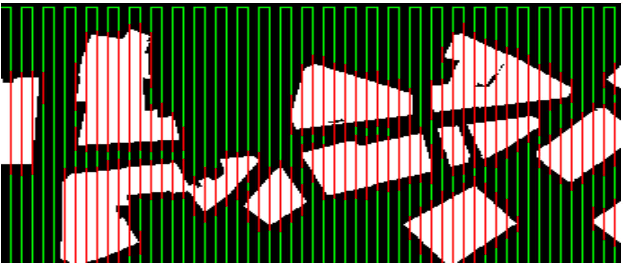
We study multi-agent coverage algorithms for autonomous monitoring and patrol in urban environments. We consider scenarios in which a team of flying agents uses downward facing cameras (or similar sensors) to observe the environment outside of buildings at street-level. Buildings are considered obstacles that impede movement, and cameras are assumed to be ineffective above a maximum altitude. We study multi-agent urban coverage problems related to this scenario, including: (1) static multi-agent urban coverage, in which agents are expected to observe the environment from static locations, and (2) dynamic multi-agent urban coverage where agents move continuously through the environment. We experimentally evaluate six different multi-agent coverage methods, including: three types of ergodic coverage (that avoid buildings in different ways), lawn-mower sweep, voronoi region based control, and a naive grid method. We evaluate all algorithms with respect to four performance metrics (percent coverage, revist count, revist time, and the integral of area viewed over time), across four types of urban environments [low density, high density] x [short buildings, tall buildings], and for team sizes ranging from 2 to 25 agents. We believe this is the first extensive comparison of these methods in an urban setting. Our results highlight how the relative performance of static and dynamic methods changes based on the ratio of team size to search area, as well the relative effects that different characteristics of urban environments (tall, short, dense, sparse, mixed) have on each algorithm.
LSwarm: Efficient Collision Avoidance for Large Swarms with Coverage Constraints in Complex Urban Scenes
Mar 06, 2019
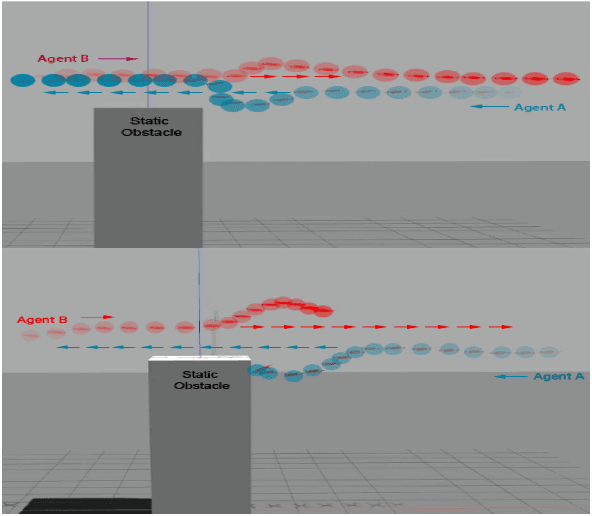
In this paper, we address the problem of collision avoidance for a swarm of UAVs used for continuous surveillance of an urban environment. Our method, LSwarm, efficiently avoids collisions with static obstacles, dynamic obstacles and other agents in 3-D urban environments while considering coverage constraints. LSwarm computes collision avoiding velocities that (i) maximize the conformity of an agent to an optimal path given by a global coverage strategy and (ii) ensure sufficient resolution of the coverage data collected by each agent. Our algorithm is formulated based on ORCA (Optimal Reciprocal Collision Avoidance) and is scalable with respect to the size of the swarm. We evaluate the coverage performance of LSwarm in realistic simulations of a swarm of quadrotors in complex urban models. In practice, our approach can compute collision avoiding velocities for a swarm composed of tens to hundreds of agents in a few milliseconds on dense urban scenes consisting of tens of buildings.
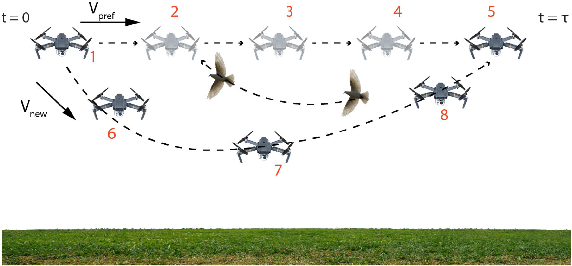
Planning for Optimal Feedback Control in the Volume of Free Space
Apr 29, 2015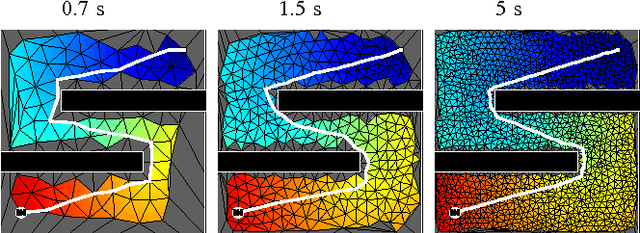
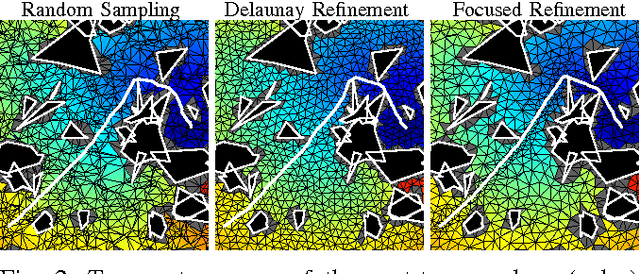
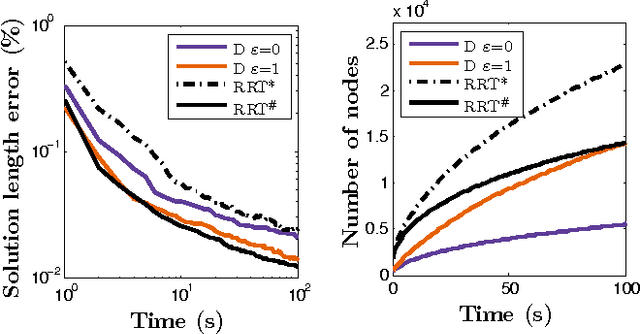
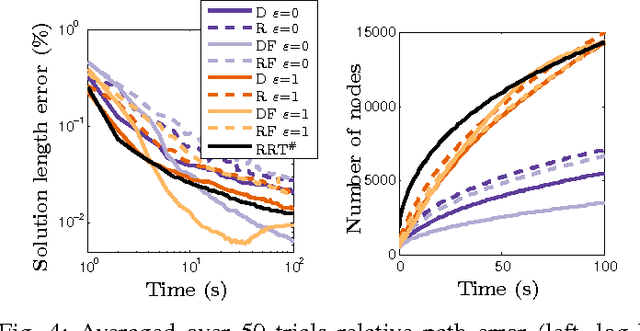
The problem of optimal feedback planning among obstacles in d-dimensional configuration spaces is considered. We present a sampling-based, asymptotically optimal feedback planning method. Our method combines an incremental construction of the Delaunay triangulation, volumetric collision-detection module, and a modified Fast Marching Method to compute a converging sequence of feedback functions. The convergence and asymptotic runtime are proven theoretically and investigated during numerical experiments, in which the proposed method is compared with the state-of-the-art asymptotically optimal path planners. The results show that our method is competitive with the previous algorithms. Unlike the shortest trajectory computed by many path planning algorithms, the resulting feedback functions can be used directly for robot navigation in our case. Finally, we present a straightforward extension of our method that handles dynamic environments where obstacles can appear, disappear, or move.
Free-configuration Biased Sampling for Motion Planning: Errata
Nov 03, 2013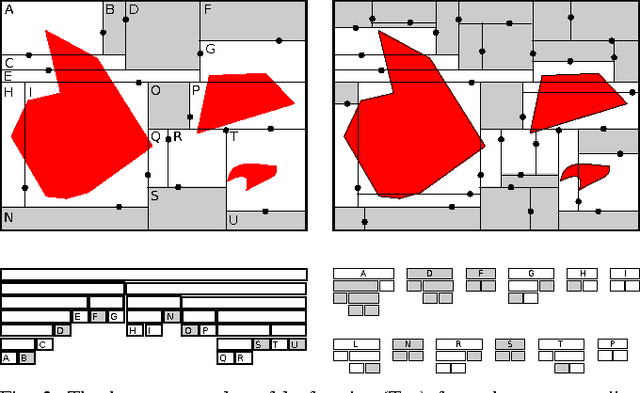
This document contains improved and updated proofs of convergence for the sampling method presented in our paper "Free-configuration Biased Sampling for Motion Planning".
Fast Collision Checking: From Single Robots to Multi-Robot Teams
May 10, 2013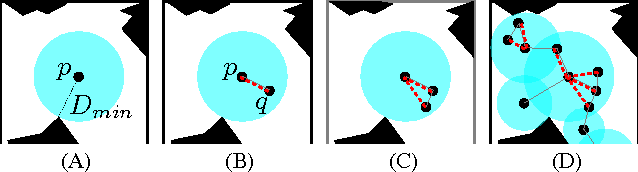


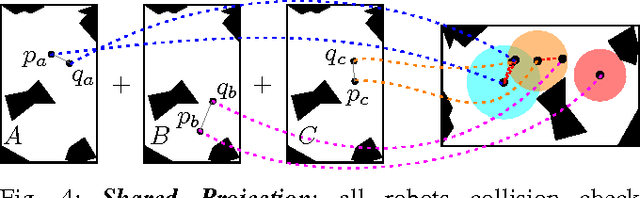
We examine three different algorithms that enable the collision certificate method from [Bialkowski, et al.] to handle the case of a centralized multi-robot team. By taking advantage of symmetries in the configuration space of multi-robot teams, our methods can significantly reduce the number of collision checks vs. both [Bialkowski, et al.] and standard collision checking implementations.