Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree-configuration Biased Sampling for Motion Planning: Errata
Nov 03, 2013
This document contains improved and updated proofs of convergence for the sampling method presented in our paper "Free-configuration Biased Sampling for Motion Planning".
Via
Fast Collision Checking: From Single Robots to Multi-Robot Teams
May 10, 2013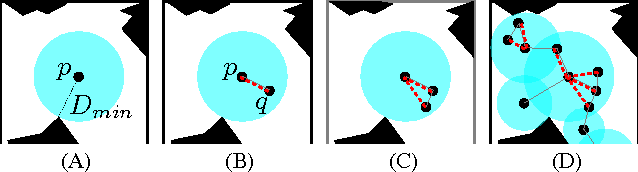


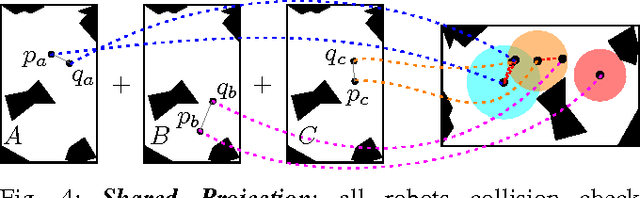
We examine three different algorithms that enable the collision certificate method from [Bialkowski, et al.] to handle the case of a centralized multi-robot team. By taking advantage of symmetries in the configuration space of multi-robot teams, our methods can significantly reduce the number of collision checks vs. both [Bialkowski, et al.] and standard collision checking implementations.
Via