 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeasonal Station-Keeping of Short Duration High Altitude Balloons using Deep Reinforcement Learning
Feb 07, 2025Station-Keeping short-duration high-altitude balloons (HABs) in a region of interest is a challenging path-planning problem due to partially observable, complex, and dynamic wind flows. Deep reinforcement learning is a popular strategy for solving the station-keeping problem. A custom simulation environment was developed to train and evaluate Deep Q-Learning (DQN) for short-duration HAB agents in the simulation. To train the agents on realistic winds, synthetic wind forecasts were generated from aggregated historical radiosonde data to apply horizontal kinematics to simulated agents. The synthetic forecasts were closely correlated with ECWMF ERA5 Reanalysis forecasts, providing a realistic simulated wind field and seasonal and altitudinal variances between the wind models. DQN HAB agents were then trained and evaluated across different seasonal months. To highlight differences and trends in months with vastly different wind fields, a Forecast Score algorithm was introduced to independently classify forecasts based on wind diversity, and trends between station-keeping success and the Forecast Score were evaluated across all seasons.
Transformer Guided Coevolution: Improved Team Formation in Multiagent Adversarial Games
Oct 17, 2024



We consider the problem of team formation within multiagent adversarial games. We propose BERTeam, a novel algorithm that uses a transformer-based deep neural network with Masked Language Model training to select the best team of players from a trained population. We integrate this with coevolutionary deep reinforcement learning, which trains a diverse set of individual players to choose teams from. We test our algorithm in the multiagent adversarial game Marine Capture-The-Flag, and we find that BERTeam learns non-trivial team compositions that perform well against unseen opponents. For this game, we find that BERTeam outperforms MCAA, an algorithm that similarly optimizes team formation.
Learning Emergent Behavior in Robot Swarms with NEAT
Sep 26, 2023When researching robot swarms, many studies observe complex group behavior emerging from the individual agents' simple local actions. However, the task of learning an individual policy to produce a desired emergent behavior remains a challenging and largely unsolved problem. We present a method of training distributed robotic swarm algorithms to produce emergent behavior. Inspired by the biological evolution of emergent behavior in animals, we use an evolutionary algorithm to train a 'population' of individual behaviors to approximate a desired group behavior. We perform experiments using simulations of the Georgia Tech Miniature Autonomous Blimps (GT-MABs) aerial robotics platforms conducted in the CoppeliaSim simulator. Additionally, we test on simulations of Anki Vector robots to display our algorithm's effectiveness on various modes of actuation. We evaluate our algorithm on various tasks where a somewhat complex group behavior is required for success. These tasks include an Area Coverage task, a Surround Target task, and a Wall Climb task. We compare behaviors evolved using our algorithm against 'designed policies', which we create in order to exhibit the emergent behaviors we desire.
Path-Based Sensors: Will the Knowledge of Correlation in Random Variables Accelerate Information Gathering?
May 11, 2023



Effective communication is crucial for deploying robots in mission-specific tasks, but inadequate or unreliable communication can greatly reduce mission efficacy, for example in search and rescue missions where communication-denied conditions may occur. In such missions, robots are deployed to locate targets, such as human survivors, but they might get trapped at hazardous locations, such as in a trapping pit or by debris. Thus, the information the robot collected is lost owing to the lack of communication. In our prior work, we developed the notion of a path-based sensor. A path-based sensor detects whether or not an event has occurred along a particular path, but it does not provide the exact location of the event. Such path-based sensor observations are well-suited to communication-denied environments, and various studies have explored methods to improve information gathering in such settings. In some missions it is typical for target elements to be in close proximity to hazardous factors that hinder the information-gathering process. In this study, we examine a similar scenario and conduct experiments to determine if additional knowledge about the correlation between hazards and targets improves the efficiency of information gathering. To incorporate this knowledge, we utilize a Bayesian network representation of domain knowledge and develop an algorithm based on this representation. Our empirical investigation reveals that such additional information on correlation is beneficial only in environments with moderate hazard lethality, suggesting that while knowledge of correlation helps, further research and development is necessary for optimal outcomes.
Acoustic Beamforming for Object-relative Distance Estimation and Control in Unmanned Air Vehicles using Propulsion System Noise
Apr 15, 2023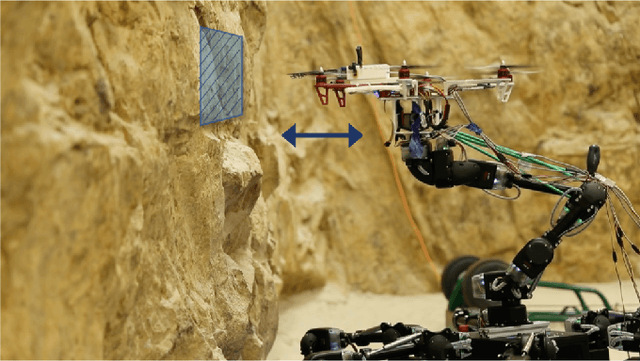
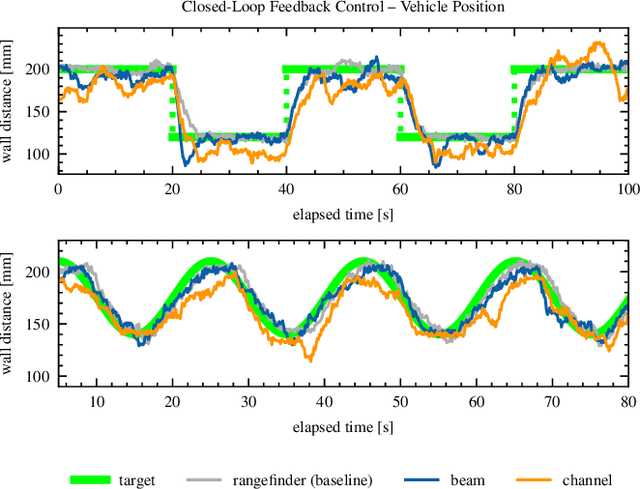
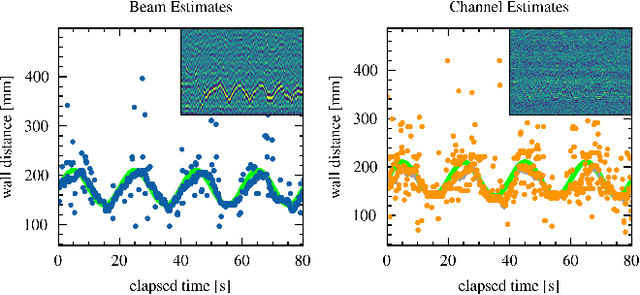
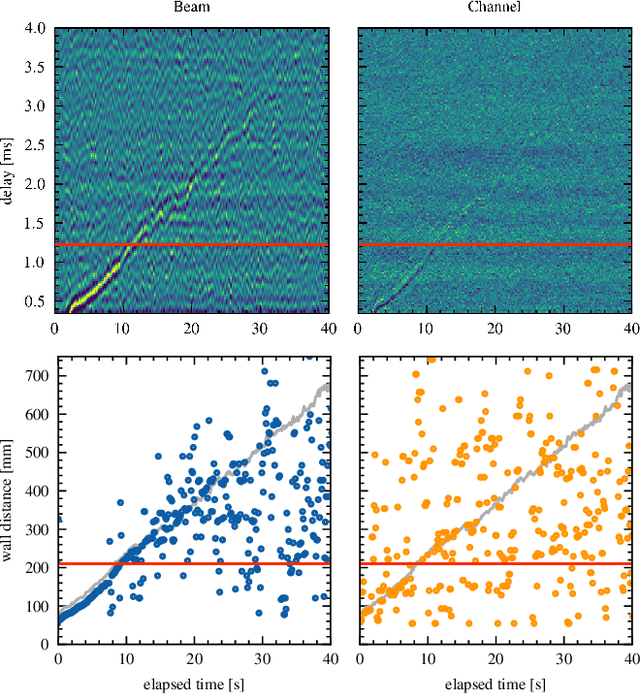
Unmanned air vehicles often produce significant noise from their propulsion systems. Using this broadband signal as "acoustic illumination" for an auxiliary sensing system could make vehicles more robust at a minimal cost. We present an acoustic beamforming-based algorithm that estimates object-relative distance with a small two-microphone array using the generated propulsion system noise of a vehicle. We demonstrate this approach in several closed-loop distance feedback control tests with a mounted quad-rotor vehicle in a noisy environment and show accurate object-relative distance estimates more than 2x further than the baseline channel-based approach. We conclude that this approach is robust to several practical vehicle and noise situations and shows promise for use in more complex operating environments.
Design, Implementation, and Cooperative Coevolution of an Autonomous/ Teleoperated Control System for a Serpentine Robotic Manipulator
Jun 07, 2007


Design, implementation, and machine learning issues associated with developing a control system for a serpentine robotic manipulator are explored. The controller developed provides autonomous control of the serpentine robotic manipulatorduring operation of the manipulator within an enclosed environment such as an underground storage tank. The controller algorithms make use of both low-level joint angle control employing force/position feedback constraints, and high-level coordinated control of end-effector positioning. This approach has resulted in both high-level full robotic control and low-level telerobotic control modes, and provides a high level of dexterity for the operator.