 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Models for Flapping Fin Unmanned Underwater Vehicle Control System Gait Optimization
Jul 01, 2024



The last few decades have led to the rise of research focused on propulsion and control systems for bio-inspired unmanned underwater vehicles (UUVs), which provide more maneuverable alternatives to traditional UUVs in underwater missions. Recent work has explored the use of time-series neural network surrogate models to predict thrust and power from vehicle design and fin kinematics. We develop a search-based inverse model that leverages kinematics-to-thrust and kinematics-to-power neural network models for control system design. Our inverse model finds a set of fin kinematics with the multi-objective goal of reaching a target thrust under power constraints while creating a smooth kinematics transition between flapping cycles. We demonstrate how a control system integrating this inverse model can make online, cycle-to-cycle adjustments to prioritize different system objectives, with improvements in increasing thrust generation or reducing power consumption of any given movement upwards of 0.5 N and 3.0 W in a range of 2.2 N and 9.0 W. As propulsive efficiency is of utmost importance for flapping-fin UUVs in order to extend their range and endurance for essential operations but lacks prior research, we develop a non-dimensional figure of merit (FOM), derived from measures of propulsive efficiency, that is able to evaluate different fin designs and kinematics, and allow for comparison with other bio-inspired platforms. We use the developed FOM to analyze optimal gaits and compare the performance between different fin materials, providing a better understanding of how fin materials affect thrust generation and propulsive efficiency and allowing us to inform control systems and weight for efficiency on the developed inverse gait-selector model.
Data-Driven Approaches for Thrust Prediction in Underwater Flapping Fin Propulsion Systems
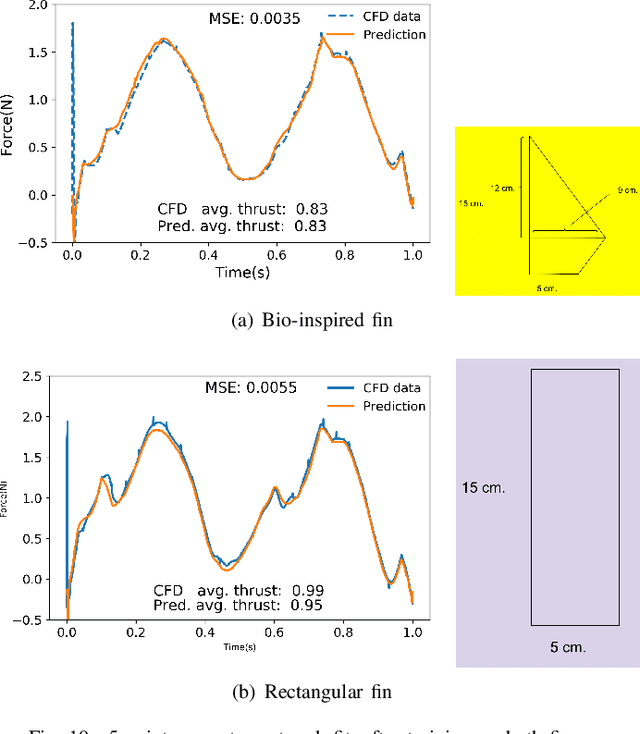
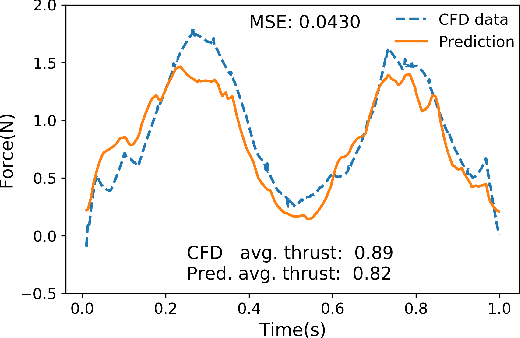
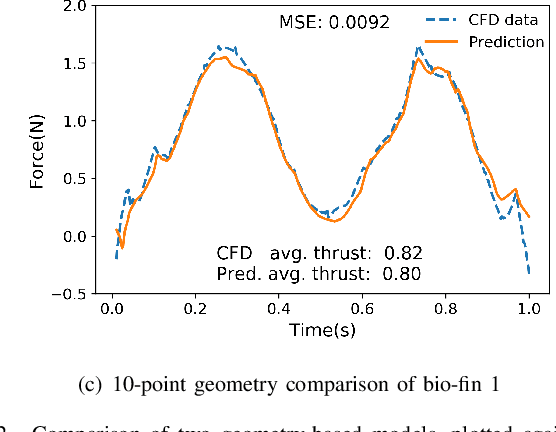
Jun 04, 2024Flapping-fin underwater vehicle propulsion systems provide an alternative to propeller-driven systems in situations that require involve a constrained environment or require high maneuverability. Testing new configurations through experiments or high-fidelity simulations is an expensive process, slowing development of new systems. This is especially true when introducing new fin geometries. In this work, we propose machine learning approaches for thrust prediction given the system's fin geometries and kinematics. We introduce data-efficient fin shape parameterization strategies that enable our network to predict thrust profiles for unseen fin geometries given limited fin shapes in input data. In addition to faster development of systems, generalizable surrogate models offer fast, accurate predictions that could be used on an unmanned underwater vehicle control system.
Computational Approaches for Modeling Power Consumption on an Underwater Flapping Fin Propulsion System
Oct 21, 2023



The last few decades have led to the rise of research focused on propulsion and control systems for bio-inspired unmanned underwater vehicles (UUVs), which provide more maneuverable alternatives to traditional UUVs in underwater missions. Propulsive efficiency is of utmost importance for flapping-fin UUVs in order to extend their range and endurance for essential operations. To optimize for different gait performance metrics, we develop a non-dimensional figure of merit (FOM), derived from measures of propulsive efficiency, that is able to evaluate different fin designs and kinematics, and allow for comparison with other bio-inspired platforms. We create and train computational models using experimental data, and use these models to predict thrust and power under different fin operating states, providing efficiency profiles. We then use the developed FOM to analyze optimal gaits and compare the performance between different fin materials. These comparisons provide a better understanding of how fin materials affect our thrust generation and propulsive efficiency, allowing us to inform control systems and weight for efficiency on an inverse gait-selector model.
Acoustic Beamforming for Object-relative Distance Estimation and Control in Unmanned Air Vehicles using Propulsion System Noise
Apr 15, 2023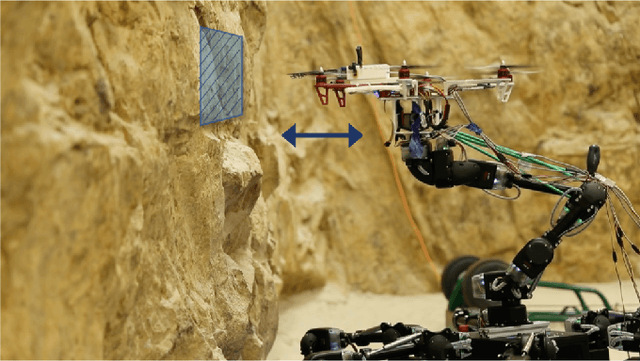
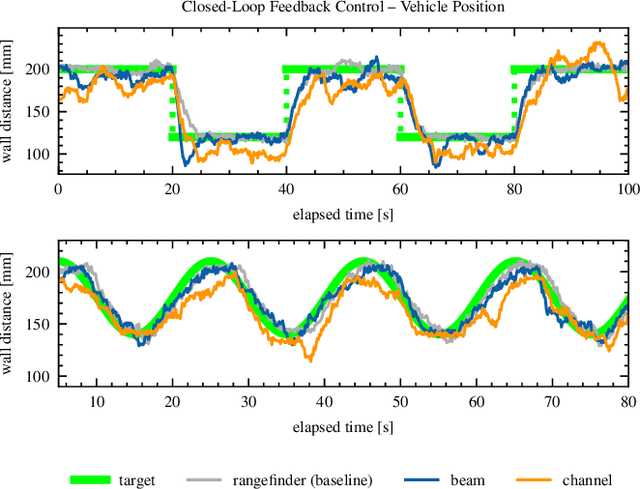
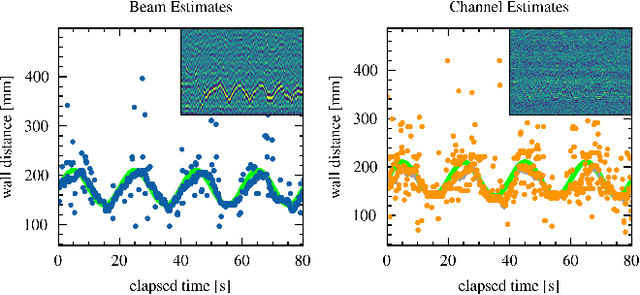
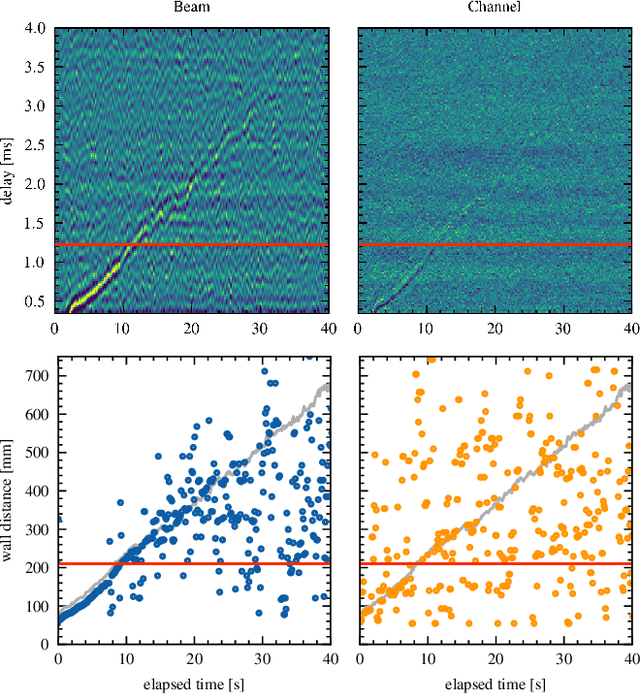
Unmanned air vehicles often produce significant noise from their propulsion systems. Using this broadband signal as "acoustic illumination" for an auxiliary sensing system could make vehicles more robust at a minimal cost. We present an acoustic beamforming-based algorithm that estimates object-relative distance with a small two-microphone array using the generated propulsion system noise of a vehicle. We demonstrate this approach in several closed-loop distance feedback control tests with a mounted quad-rotor vehicle in a noisy environment and show accurate object-relative distance estimates more than 2x further than the baseline channel-based approach. We conclude that this approach is robust to several practical vehicle and noise situations and shows promise for use in more complex operating environments.
Data-Driven Machine Learning Models for a Multi-Objective Flapping Fin Unmanned Underwater Vehicle Control System
Sep 14, 2022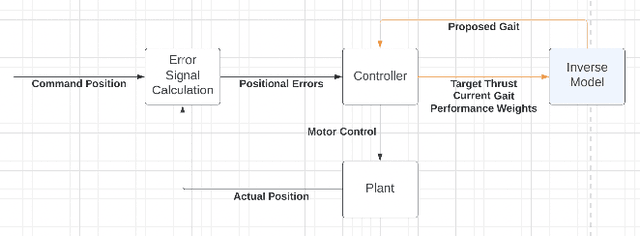

Flapping-fin unmanned underwater vehicle (UUV) propulsion systems provide high maneuverability for naval tasks such as surveillance and terrain exploration. Recent work has explored the use of time-series neural network surrogate models to predict thrust from vehicle design and fin kinematics. We develop a search-based inverse model that leverages a kinematics-to-thrust neural network model for control system design. Our inverse model finds a set of fin kinematics with the multi-objective goal of reaching a target thrust and creating a smooth kinematic transition between flapping cycles. We demonstrate how a control system integrating this inverse model can make online, cycle-to-cycle adjustments to prioritize different system objectives.
Unsupervised Learning of Depth and Ego-Motion from Cylindrical Panoramic Video with Applications for Virtual Reality
Nov 10, 2020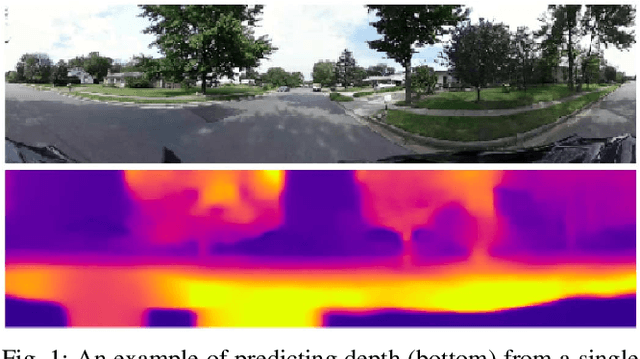
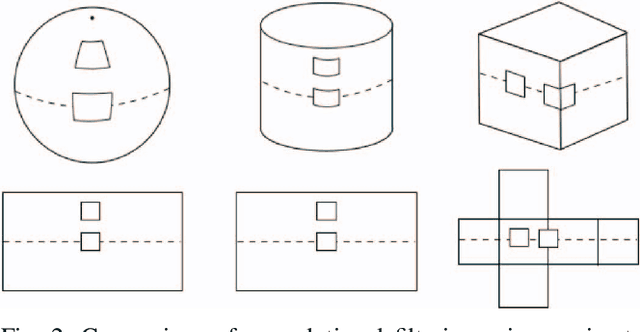
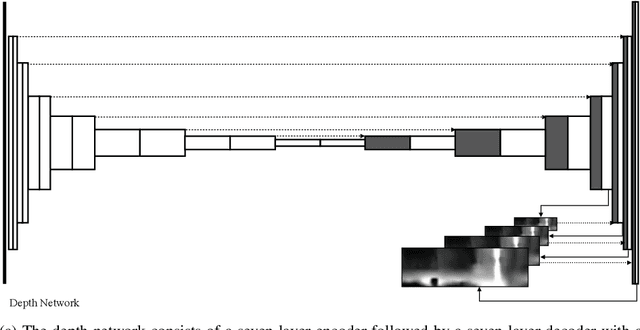
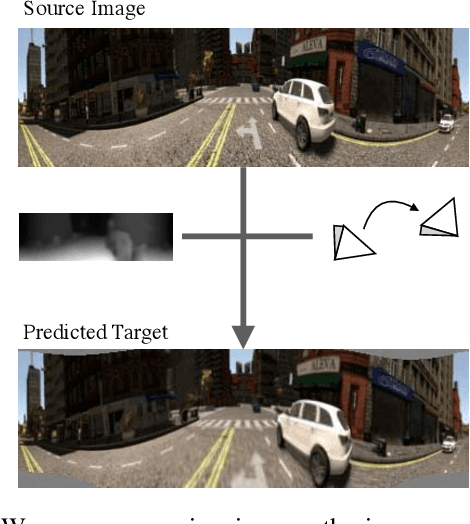
We introduce a convolutional neural network model for unsupervised learning of depth and ego-motion from cylindrical panoramic video. Panoramic depth estimation is an important technology for applications such as virtual reality, 3D modeling, and autonomous robotic navigation. In contrast to previous approaches for applying convolutional neural networks to panoramic imagery, we use the cylindrical panoramic projection which allows for the use of the traditional CNN layers such as convolutional filters and max pooling without modification. Our evaluation of synthetic and real data shows that unsupervised learning of depth and ego-motion on cylindrical panoramic images can produce high-quality depth maps and that an increased field-of-view improves ego-motion estimation accuracy. We create two new datasets to evaluate our approach: a synthetic dataset created using the CARLA simulator, and Headcam, a novel dataset of panoramic video collected from a helmet-mounted camera while biking in an urban setting. We also apply our network to the problem of converting monocular panoramas to stereo panoramas.
* Expansion on arXiv:1901.00979 for IJSC SI; correct table 1 and 3 headings, reduce file size
Evaluation of Surrogate Models for Multi-fin Flapping Propulsion Systems
Oct 31, 2019
The aim of this study is to develop surrogate models for quick, accurate prediction of thrust forces generated through flapping fin propulsion for given operating conditions and fin geometries. Different network architectures and configurations are explored to model the training data separately for the lead fin and rear fin of a tandem fin setup. We progressively improve the data representation of the input parameter space for model predictions. The models are tested on three unseen fin geometries and the predictions validated with computational fluid dynamics (CFD) data. Finally, the orders of magnitude gains in computational performance of these surrogate models, compared to experimental and CFD runs, vs their tradeoff with accuracy is discussed within the context of this tandem fin configuration.
Unsupervised Learning of Depth and Ego-Motion from Panoramic Video
Jan 04, 2019


We introduce a convolutional neural network model for unsupervised learning of depth and ego-motion from cylindrical panoramic video. Panoramic depth estimation is an important technology for applications such as autonomous robotic navigation, virtual reality, and 3D modeling. In contrast to previous approaches for applying convolutional neural networks to panoramic imagery, we use the cylindrical panoramic projection which allows for the use of the traditional CNN layers such as convolutional filters and max pooling without modification. Our evaluation on synthetic and real data shows that unsupervised learning of depth and ego-motion on panoramic images increases depth prediction accuracy in comparison to training on perspective images which have a narrower field-of-view.