 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Assisted Fixes to Code Review Comments at Scale
Jul 17, 2025Aim. There are 10s of thousands of code review comments each week at Meta. We developed Metamate for Code Review (MetaMateCR) that provides AI-assisted fixes for reviewer comments in production at scale. Method. We developed an internal benchmark of 64k <review comment, patch> data points to fine-tune Llama models. Once our models achieve reasonable offline results, we roll them into production. To ensure that our AI-assisted fixes do not negatively impact the time it takes to do code reviews, we conduct randomized controlled safety trials as well as full production experiments. Offline Results. As a baseline, we compare GPT-4o to our small and large Llama models. In offline results, our LargeLSFT model creates an exact match patch 68% of the time outperforming GPT-4o by 9 percentage points (pp). The internal models also use more modern Hack functions when compared to the PHP functions suggested by GPT-4o. Safety Trial. When we roll MetaMateCR into production in a safety trial that compares no AI patches with AI patch suggestions, we see a large regression with reviewers taking over 5% longer to conduct reviews. After investigation, we modify the UX to only show authors the AI patches, and see no regressions in the time for reviews. Production. When we roll LargeLSFT into production, we see an ActionableToApplied rate of 19.7%, which is a 9.2pp improvement over GPT-4o. Our results illustrate the importance of safety trials in ensuring that AI does not inadvertently slow down engineers, and a successful review comment to AI patch product running at scale.
Pheromone-based Learning of Optimal Reasoning Paths
Jan 31, 2025Large Language Models (LLMs) have demonstrated remarkable reasoning capabilities through chain-of-thought prompting, yet discovering effective reasoning methods for complex problems remains challenging due to the vast space of possible intermediate steps. We introduce Ant Colony Optimization-guided Tree of Thought (ACO-ToT), a novel algorithm that combines ACO with LLMs to discover optimal reasoning paths for complex problems efficiently. Drawing inspiration from Hebbian learning in neurological systems, our method employs a collection of distinctly fine-tuned LLM "ants" to traverse and lay pheromone trails through a centralized tree of thought, with each ant's movement governed by a weighted combination of existing pheromone trails and its own specialized expertise. The algorithm evaluates complete reasoning paths using a mixture-of-experts-based scoring function, with pheromones reinforcing productive reasoning paths across iterations. Experiments on three challenging reasoning tasks (GSM8K, ARC-Challenge, and MATH) demonstrate that ACO-ToT performs significantly better than existing chain-of-thought optimization approaches, suggesting that incorporating biologically inspired collective search mechanisms into LLM inference can substantially enhance reasoning capabilities.
MINDSTORES: Memory-Informed Neural Decision Synthesis for Task-Oriented Reinforcement in Embodied Systems
Jan 31, 2025



While large language models (LLMs) have shown promising capabilities as zero-shot planners for embodied agents, their inability to learn from experience and build persistent mental models limits their robustness in complex open-world environments like Minecraft. We introduce MINDSTORES, an experience-augmented planning framework that enables embodied agents to build and leverage mental models through natural interaction with their environment. Drawing inspiration from how humans construct and refine cognitive mental models, our approach extends existing zero-shot LLM planning by maintaining a database of past experiences that informs future planning iterations. The key innovation is representing accumulated experiences as natural language embeddings of (state, task, plan, outcome) tuples, which can then be efficiently retrieved and reasoned over by an LLM planner to generate insights and guide plan refinement for novel states and tasks. Through extensive experiments in the MineDojo environment, a simulation environment for agents in Minecraft that provides low-level controls for Minecraft, we find that MINDSTORES learns and applies its knowledge significantly better than existing memory-based LLM planners while maintaining the flexibility and generalization benefits of zero-shot approaches, representing an important step toward more capable embodied AI systems that can learn continuously through natural experience.
Deep Learning Models for Flapping Fin Unmanned Underwater Vehicle Control System Gait Optimization
Jul 01, 2024



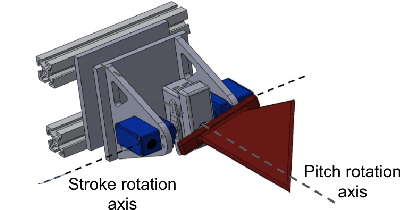
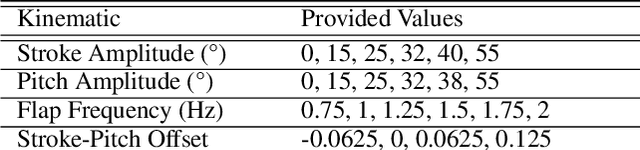
The last few decades have led to the rise of research focused on propulsion and control systems for bio-inspired unmanned underwater vehicles (UUVs), which provide more maneuverable alternatives to traditional UUVs in underwater missions. Recent work has explored the use of time-series neural network surrogate models to predict thrust and power from vehicle design and fin kinematics. We develop a search-based inverse model that leverages kinematics-to-thrust and kinematics-to-power neural network models for control system design. Our inverse model finds a set of fin kinematics with the multi-objective goal of reaching a target thrust under power constraints while creating a smooth kinematics transition between flapping cycles. We demonstrate how a control system integrating this inverse model can make online, cycle-to-cycle adjustments to prioritize different system objectives, with improvements in increasing thrust generation or reducing power consumption of any given movement upwards of 0.5 N and 3.0 W in a range of 2.2 N and 9.0 W. As propulsive efficiency is of utmost importance for flapping-fin UUVs in order to extend their range and endurance for essential operations but lacks prior research, we develop a non-dimensional figure of merit (FOM), derived from measures of propulsive efficiency, that is able to evaluate different fin designs and kinematics, and allow for comparison with other bio-inspired platforms. We use the developed FOM to analyze optimal gaits and compare the performance between different fin materials, providing a better understanding of how fin materials affect thrust generation and propulsive efficiency and allowing us to inform control systems and weight for efficiency on the developed inverse gait-selector model.
Computational Approaches for Modeling Power Consumption on an Underwater Flapping Fin Propulsion System
Oct 21, 2023



The last few decades have led to the rise of research focused on propulsion and control systems for bio-inspired unmanned underwater vehicles (UUVs), which provide more maneuverable alternatives to traditional UUVs in underwater missions. Propulsive efficiency is of utmost importance for flapping-fin UUVs in order to extend their range and endurance for essential operations. To optimize for different gait performance metrics, we develop a non-dimensional figure of merit (FOM), derived from measures of propulsive efficiency, that is able to evaluate different fin designs and kinematics, and allow for comparison with other bio-inspired platforms. We create and train computational models using experimental data, and use these models to predict thrust and power under different fin operating states, providing efficiency profiles. We then use the developed FOM to analyze optimal gaits and compare the performance between different fin materials. These comparisons provide a better understanding of how fin materials affect our thrust generation and propulsive efficiency, allowing us to inform control systems and weight for efficiency on an inverse gait-selector model.
Data-Driven Machine Learning Models for a Multi-Objective Flapping Fin Unmanned Underwater Vehicle Control System
Sep 14, 2022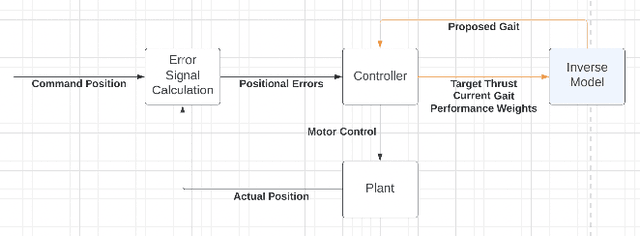

Flapping-fin unmanned underwater vehicle (UUV) propulsion systems provide high maneuverability for naval tasks such as surveillance and terrain exploration. Recent work has explored the use of time-series neural network surrogate models to predict thrust from vehicle design and fin kinematics. We develop a search-based inverse model that leverages a kinematics-to-thrust neural network model for control system design. Our inverse model finds a set of fin kinematics with the multi-objective goal of reaching a target thrust and creating a smooth kinematic transition between flapping cycles. We demonstrate how a control system integrating this inverse model can make online, cycle-to-cycle adjustments to prioritize different system objectives.