 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAcoustic Beamforming for Object-relative Distance Estimation and Control in Unmanned Air Vehicles using Propulsion System Noise
Paper and Code
Apr 15, 2023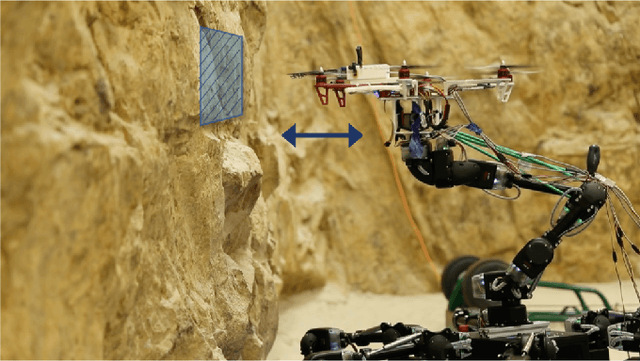
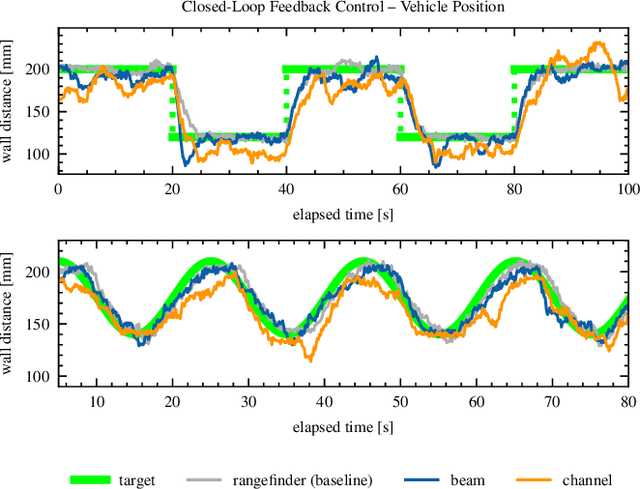
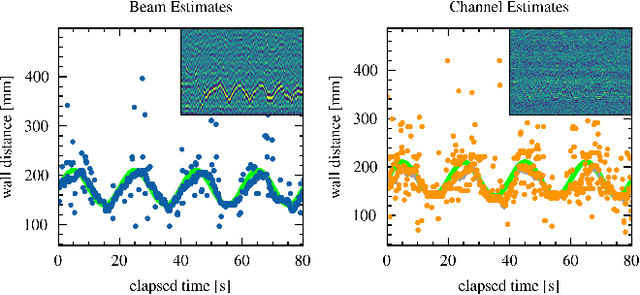
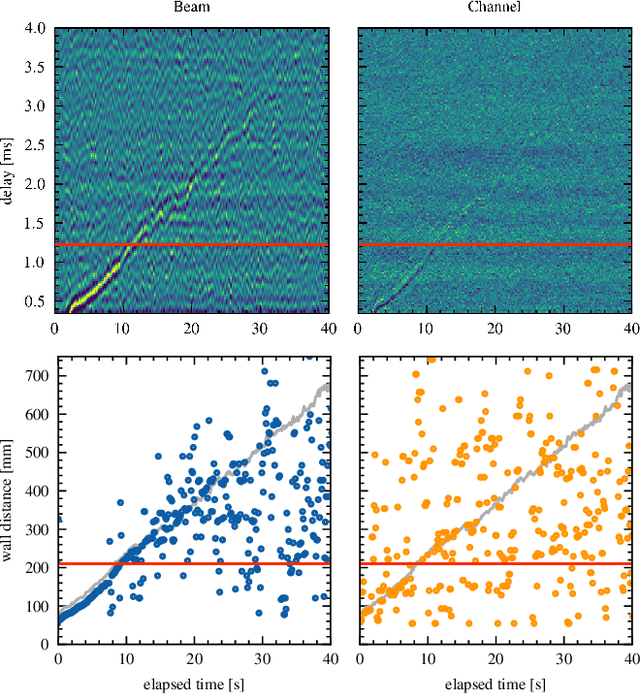
Unmanned air vehicles often produce significant noise from their propulsion systems. Using this broadband signal as "acoustic illumination" for an auxiliary sensing system could make vehicles more robust at a minimal cost. We present an acoustic beamforming-based algorithm that estimates object-relative distance with a small two-microphone array using the generated propulsion system noise of a vehicle. We demonstrate this approach in several closed-loop distance feedback control tests with a mounted quad-rotor vehicle in a noisy environment and show accurate object-relative distance estimates more than 2x further than the baseline channel-based approach. We conclude that this approach is robust to several practical vehicle and noise situations and shows promise for use in more complex operating environments.