 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding visual attention beehind bee-inspired UAV navigation
Jul 16, 2025



Bio-inspired design is often used in autonomous UAV navigation due to the capacity of biological systems for flight and obstacle avoidance despite limited sensory and computational capabilities. In particular, honeybees mainly use the sensory input of optic flow, the apparent motion of objects in their visual field, to navigate cluttered environments. In our work, we train a Reinforcement Learning agent to navigate a tunnel with obstacles using only optic flow as sensory input. We inspect the attention patterns of trained agents to determine the regions of optic flow on which they primarily base their motor decisions. We find that agents trained in this way pay most attention to regions of discontinuity in optic flow, as well as regions with large optic flow magnitude. The trained agents appear to navigate a cluttered tunnel by avoiding the obstacles that produce large optic flow, while maintaining a centered position in their environment, which resembles the behavior seen in flying insects. This pattern persists across independently trained agents, which suggests that this could be a good strategy for developing a simple explicit control law for physical UAVs.
Transformer Guided Coevolution: Improved Team Formation in Multiagent Adversarial Games
Oct 17, 2024



We consider the problem of team formation within multiagent adversarial games. We propose BERTeam, a novel algorithm that uses a transformer-based deep neural network with Masked Language Model training to select the best team of players from a trained population. We integrate this with coevolutionary deep reinforcement learning, which trains a diverse set of individual players to choose teams from. We test our algorithm in the multiagent adversarial game Marine Capture-The-Flag, and we find that BERTeam learns non-trivial team compositions that perform well against unseen opponents. For this game, we find that BERTeam outperforms MCAA, an algorithm that similarly optimizes team formation.
Learning Emergent Behavior in Robot Swarms with NEAT
Sep 26, 2023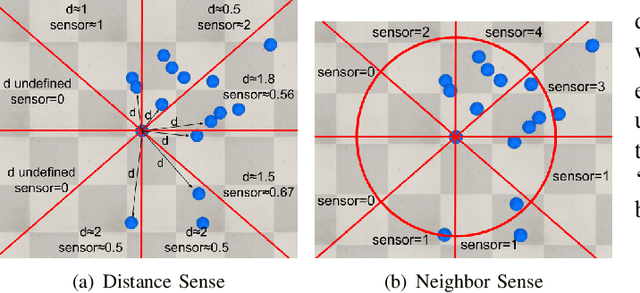
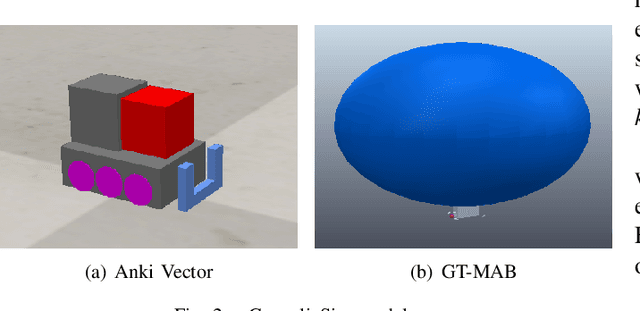
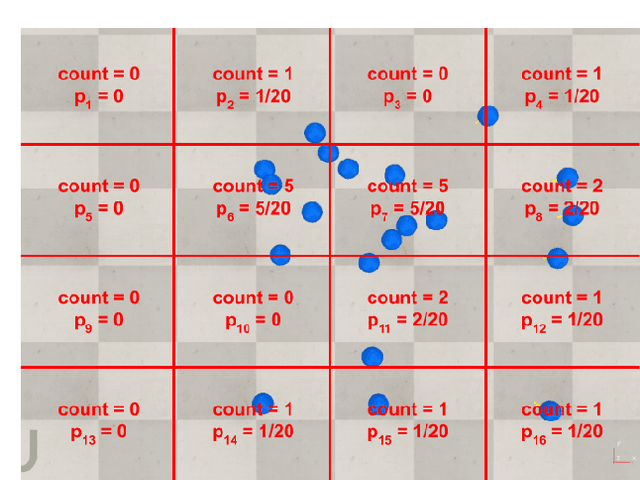
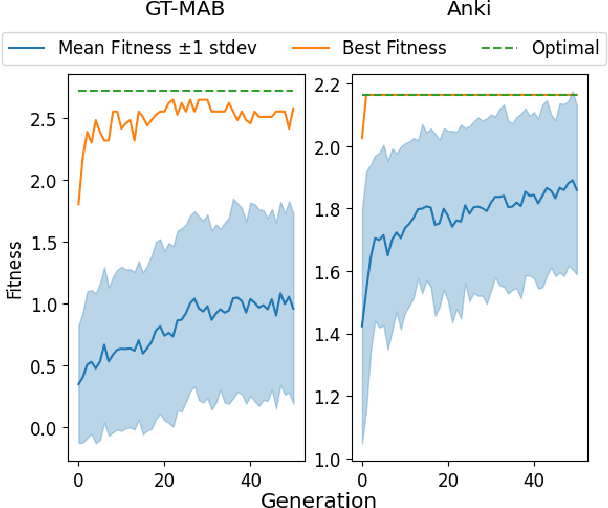
When researching robot swarms, many studies observe complex group behavior emerging from the individual agents' simple local actions. However, the task of learning an individual policy to produce a desired emergent behavior remains a challenging and largely unsolved problem. We present a method of training distributed robotic swarm algorithms to produce emergent behavior. Inspired by the biological evolution of emergent behavior in animals, we use an evolutionary algorithm to train a 'population' of individual behaviors to approximate a desired group behavior. We perform experiments using simulations of the Georgia Tech Miniature Autonomous Blimps (GT-MABs) aerial robotics platforms conducted in the CoppeliaSim simulator. Additionally, we test on simulations of Anki Vector robots to display our algorithm's effectiveness on various modes of actuation. We evaluate our algorithm on various tasks where a somewhat complex group behavior is required for success. These tasks include an Area Coverage task, a Surround Target task, and a Wall Climb task. We compare behaviors evolved using our algorithm against 'designed policies', which we create in order to exhibit the emergent behaviors we desire.