 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Coverage in Urban Environments
Aug 17, 2020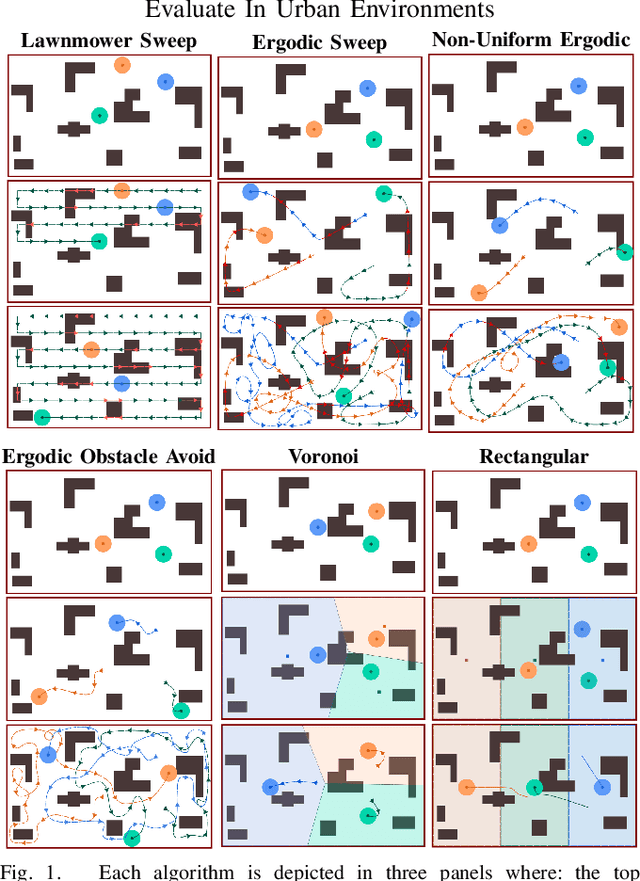
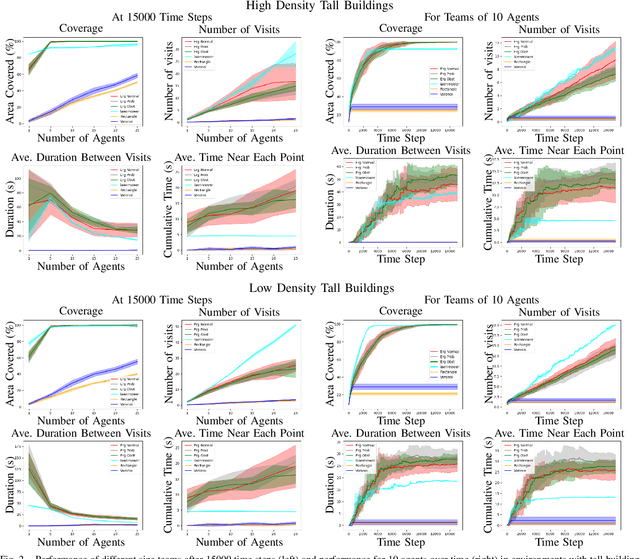
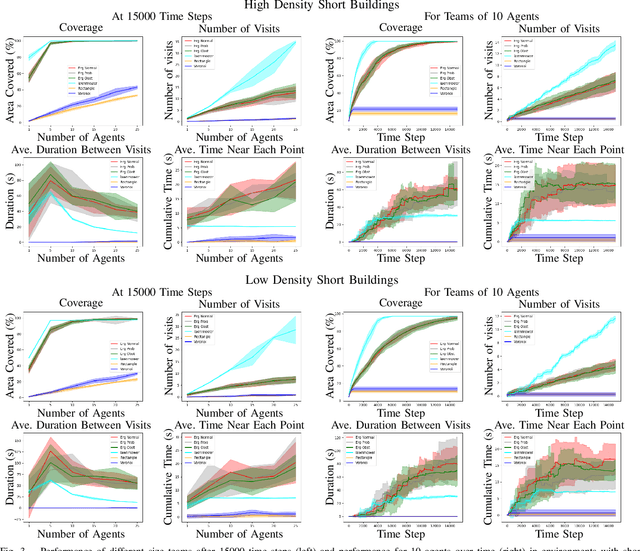
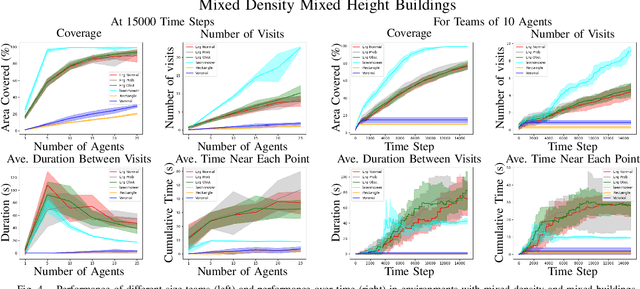
We study multi-agent coverage algorithms for autonomous monitoring and patrol in urban environments. We consider scenarios in which a team of flying agents uses downward facing cameras (or similar sensors) to observe the environment outside of buildings at street-level. Buildings are considered obstacles that impede movement, and cameras are assumed to be ineffective above a maximum altitude. We study multi-agent urban coverage problems related to this scenario, including: (1) static multi-agent urban coverage, in which agents are expected to observe the environment from static locations, and (2) dynamic multi-agent urban coverage where agents move continuously through the environment. We experimentally evaluate six different multi-agent coverage methods, including: three types of ergodic coverage (that avoid buildings in different ways), lawn-mower sweep, voronoi region based control, and a naive grid method. We evaluate all algorithms with respect to four performance metrics (percent coverage, revist count, revist time, and the integral of area viewed over time), across four types of urban environments [low density, high density] x [short buildings, tall buildings], and for team sizes ranging from 2 to 25 agents. We believe this is the first extensive comparison of these methods in an urban setting. Our results highlight how the relative performance of static and dynamic methods changes based on the ratio of team size to search area, as well the relative effects that different characteristics of urban environments (tall, short, dense, sparse, mixed) have on each algorithm.
LSwarm: Efficient Collision Avoidance for Large Swarms with Coverage Constraints in Complex Urban Scenes
Mar 06, 2019
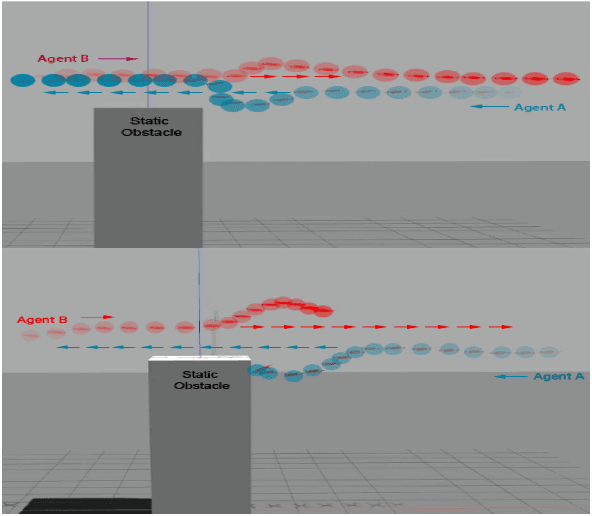
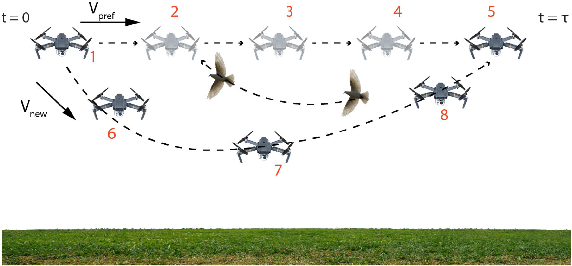
In this paper, we address the problem of collision avoidance for a swarm of UAVs used for continuous surveillance of an urban environment. Our method, LSwarm, efficiently avoids collisions with static obstacles, dynamic obstacles and other agents in 3-D urban environments while considering coverage constraints. LSwarm computes collision avoiding velocities that (i) maximize the conformity of an agent to an optimal path given by a global coverage strategy and (ii) ensure sufficient resolution of the coverage data collected by each agent. Our algorithm is formulated based on ORCA (Optimal Reciprocal Collision Avoidance) and is scalable with respect to the size of the swarm. We evaluate the coverage performance of LSwarm in realistic simulations of a swarm of quadrotors in complex urban models. In practice, our approach can compute collision avoiding velocities for a swarm composed of tens to hundreds of agents in a few milliseconds on dense urban scenes consisting of tens of buildings.