 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehAV: Behavioral Rule Guided Autonomy Using VLMs for Robot Navigation in Outdoor Scenes
Sep 24, 2024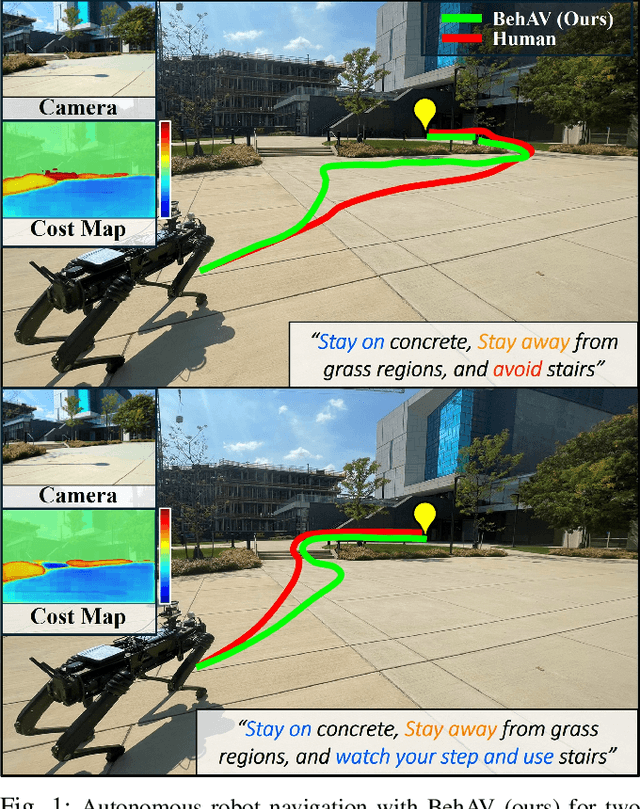
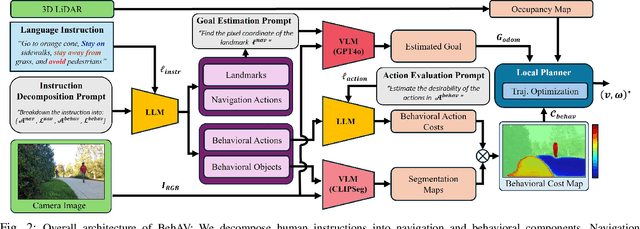

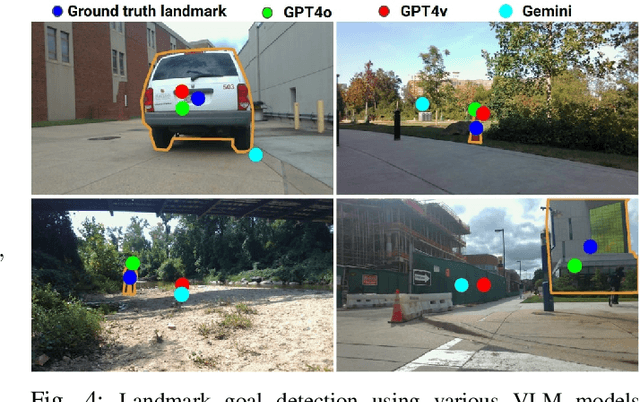
We present BehAV, a novel approach for autonomous robot navigation in outdoor scenes guided by human instructions and leveraging Vision Language Models (VLMs). Our method interprets human commands using a Large Language Model (LLM) and categorizes the instructions into navigation and behavioral guidelines. Navigation guidelines consist of directional commands (e.g., "move forward until") and associated landmarks (e.g., "the building with blue windows"), while behavioral guidelines encompass regulatory actions (e.g., "stay on") and their corresponding objects (e.g., "pavements"). We use VLMs for their zero-shot scene understanding capabilities to estimate landmark locations from RGB images for robot navigation. Further, we introduce a novel scene representation that utilizes VLMs to ground behavioral rules into a behavioral cost map. This cost map encodes the presence of behavioral objects within the scene and assigns costs based on their regulatory actions. The behavioral cost map is integrated with a LiDAR-based occupancy map for navigation. To navigate outdoor scenes while adhering to the instructed behaviors, we present an unconstrained Model Predictive Control (MPC)-based planner that prioritizes both reaching landmarks and following behavioral guidelines. We evaluate the performance of BehAV on a quadruped robot across diverse real-world scenarios, demonstrating a 22.49% improvement in alignment with human-teleoperated actions, as measured by Frechet distance, and achieving a 40% higher navigation success rate compared to state-of-the-art methods.
VLPG-Nav: Object Navigation Using Visual Language Pose Graph and Object Localization Probability Maps
Aug 15, 2024



We present VLPG-Nav, a visual language navigation method for guiding robots to specified objects within household scenes. Unlike existing methods primarily focused on navigating the robot toward objects, our approach considers the additional challenge of centering the object within the robot's camera view. Our method builds a visual language pose graph (VLPG) that functions as a spatial map of VL embeddings. Given an open vocabulary object query, we plan a viewpoint for object navigation using the VLPG. Despite navigating to the viewpoint, real-world challenges like object occlusion, displacement, and the robot's localization error can prevent visibility. We build an object localization probability map that leverages the robot's current observations and prior VLPG. When the object isn't visible, the probability map is updated and an alternate viewpoint is computed. In addition, we propose an object-centering formulation that locally adjusts the robot's pose to center the object in the camera view. We evaluate the effectiveness of our approach through simulations and real-world experiments, evaluating its ability to successfully view and center the object within the camera field of view. VLPG-Nav demonstrates improved performance in locating the object, navigating around occlusions, and centering the object within the robot's camera view, outperforming the selected baselines in the evaluation metrics.
DS-MPEPC: Safe and Deadlock-Avoiding Robot Navigation in Cluttered Dynamic Scenes
Mar 17, 2023We present an algorithm for safe robot navigation in complex dynamic environments using a variant of model predictive equilibrium point control. We use an optimization formulation to navigate robots gracefully in dynamic environments by optimizing over a trajectory cost function at each timestep. We present a novel trajectory cost formulation that significantly reduces the conservative and deadlock behaviors and generates smooth trajectories. In particular, we propose a new collision probability function that effectively captures the risk associated with a given configuration and the time to avoid collisions based on the velocity direction. Moreover, we propose a terminal state cost based on the expected time-to-goal and time-to-collision values that helps in avoiding trajectories that could result in deadlock. We evaluate our cost formulation in multiple simulated and real-world scenarios, including narrow corridors with dynamic obstacles, and observe significantly improved navigation behavior and reduced deadlocks as compared to prior methods.
DMCA: Dense Multi-agent Navigation using Attention and Communication
Sep 28, 2022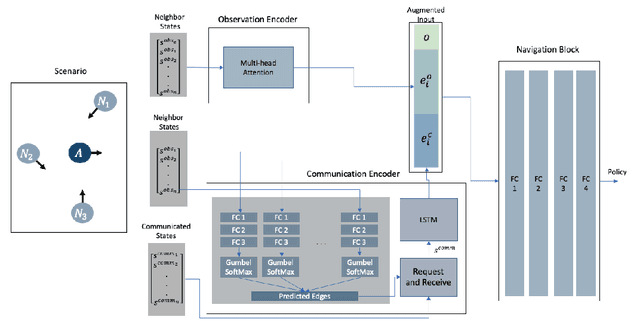
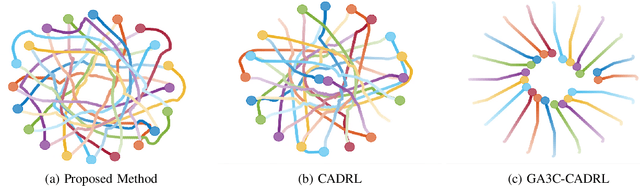
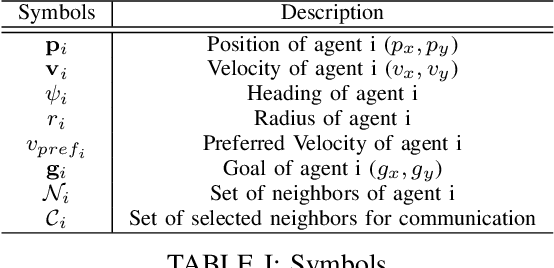

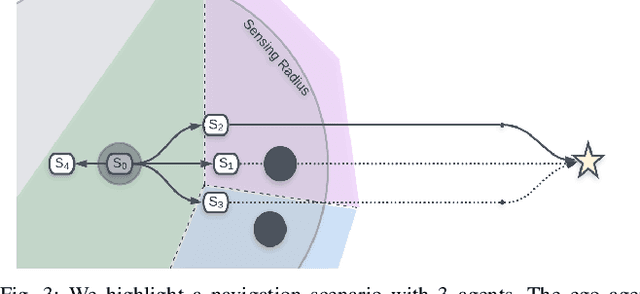
In decentralized multi-robot navigation, the agents lack the world knowledge to make safe and (near-)optimal plans reliably and make their decisions on their neighbors' observable states. We present a reinforcement learning based multi-agent navigation algorithm that performs inter-agent communications. In order to deal with the variable number of neighbors for each agent, we use a multi-head self-attention mechanism to encode neighbor information and create a fixed-length observation vector. We pose communication selection as a link prediction problem, where the network predicts whether communication is necessary given the observable information. The communicated information augments the observed neighbor information and is used to select a suitable navigation plan. We highlight the benefits of our approach by performing safe and efficient navigation among multiple robots in dense and challenging benchmarks. We also compare the performance with other learning-based methods and highlight improvements in terms of fewer collisions and time-to-goal in dense scenarios.
Dense Multi-Agent Navigation Using Voronoi Cells and Congestion Metric-based Replanning
Feb 23, 2022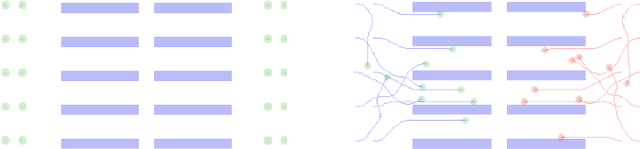
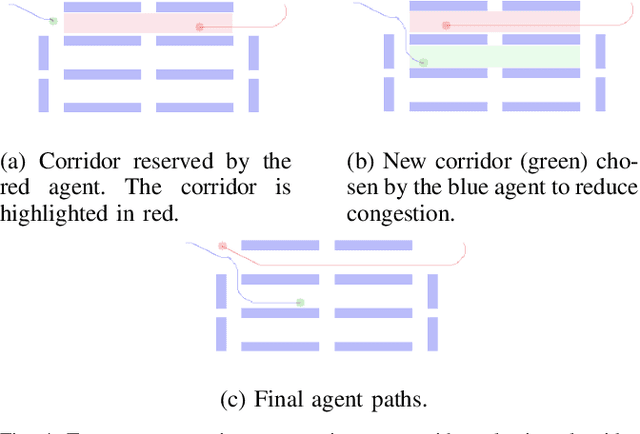
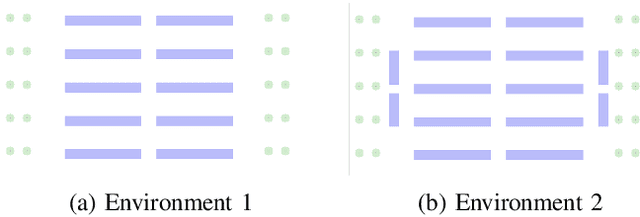
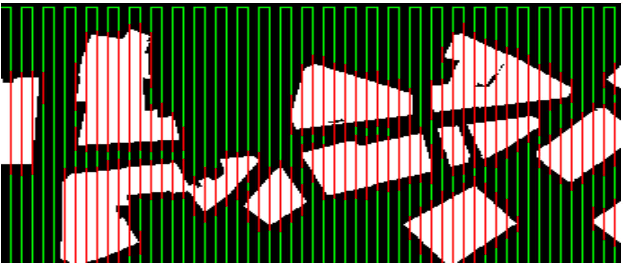
We present a decentralized path-planning algorithm for navigating multiple differential-drive robots in dense environments. In contrast to prior decentralized methods, we propose a novel congestion metric-based replanning that couples local and global planning techniques to efficiently navigate in scenarios with multiple corridors. To handle dense scenes with narrow passages, our approach computes the initial path for each agent to its assigned goal using a lattice planner. Based on neighbors' information, each agent performs online replanning using a congestion metric that tends to reduce the collisions and improves the navigation performance. Furthermore, we use the Voronoi cells of each agent to plan the local motion as well as a corridor selection strategy to limit the congestion in narrow passages. We evaluate the performance of our approach in complex warehouse-like scenes and demonstrate improved performance and efficiency over prior methods. In addition, our approach results in a higher success rate in terms of collision-free navigation to the goals.
V-RVO: Decentralized Multi-Agent Collision Avoidance using Voronoi Diagrams and Reciprocal Velocity Obstacles
Feb 26, 2021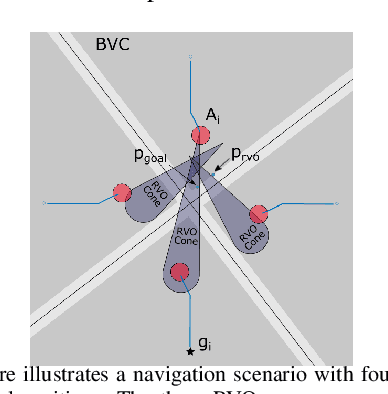
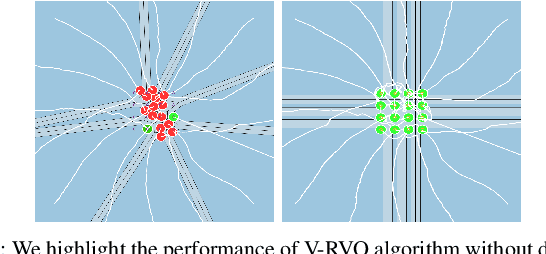

We present a decentralized collision avoidance method for dense environments that is based on buffered Voronoi cells (BVC) and reciprocal velocity obstacles (RVO). Our approach is designed for scenarios with large number of close proximity agents and provides passive-friendly collision avoidance guarantees. The Voronoi cells are superimposed with RVO cones to compute a suitable direction for each agent and we use that direction for computing a local collision-free path. Our approach can satisfy double-integrator dynamics constraints and we use the properties of the BVC to formulate a simple, decentralized deadlock resolution strategy. We demonstrate the benefits of V-RVO in complex scenarios with tens of agents in close proximity. In practice, V-RVO's performance is comparable to prior velocity-obstacle methods and the collision avoidance behavior is significantly less conservative than ORCA.
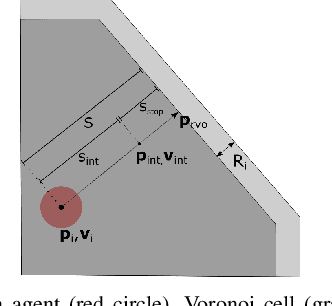
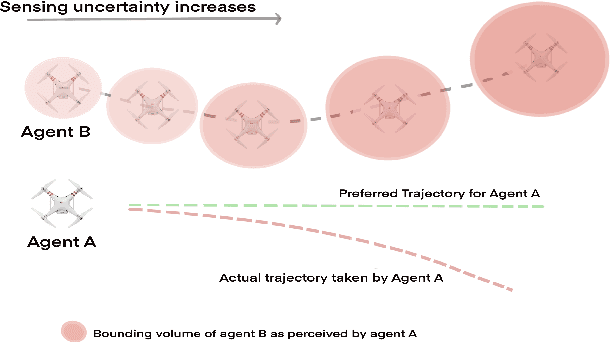
SwarmCCO: Probabilistic Reactive Collision Avoidance for Quadrotor Swarms under Uncertainty
Sep 16, 2020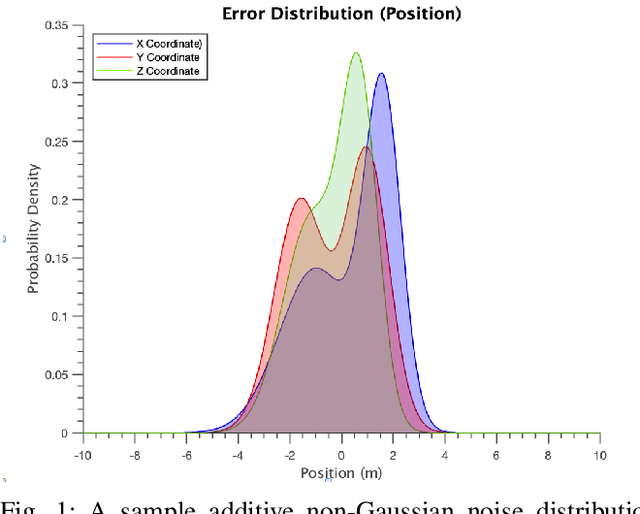
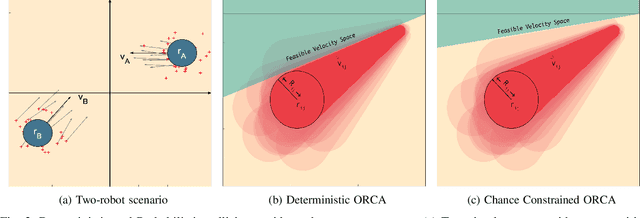
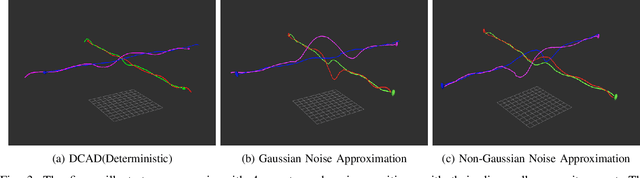
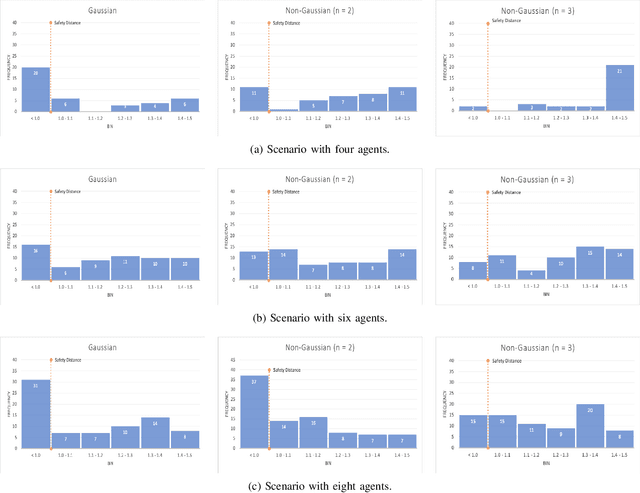
We present decentralized collision avoidance algorithms for quadrotor swarms operating under uncertain state estimation. Our approach exploits the differential flatness property and feedforward linearization to approximate the quadrotor dynamics and reciprocal collision avoidance. We account for the uncertainty in position and velocity by formulating the collision constraints as chance constraints, which describe a set of velocities that avoid collisions with a specified confidence level. We present two different methods for formulating and solving the chance constraint: our first method assumes a Gaussian noise distribution. Our second method is its extension to the non-Gaussian case by using a Gaussian Mixture Model (GMM). We reformulate the linear chance constraints into equivalent deterministic constraints on mean and covariance. Subsequently, the deterministic constraints are introduced in the MPC framework to compute a local collision-free trajectory for each quadrotor. We evaluate the proposed algorithm in simulations on benchmark scenarios and highlight its benefits over prior methods. We observe that both the Gaussian and non-Gaussian methods provide improved collision avoidance performance over the deterministic method. Further, the non-Gaussian method results in a relatively shorter path length compared to Gaussian formulations. On average, the Gaussian method requires ~5ms ms to compute a local collision-free trajectory, while our non-Gaussian method is computationally more expensive and requires ~7ms ms on average in the presence of 4 agents.
3D-OGSE: Online Smooth Trajectory Generation for Quadrotors using Generalized Shape Expansion in Unknown 3D Environments
Jun 15, 2020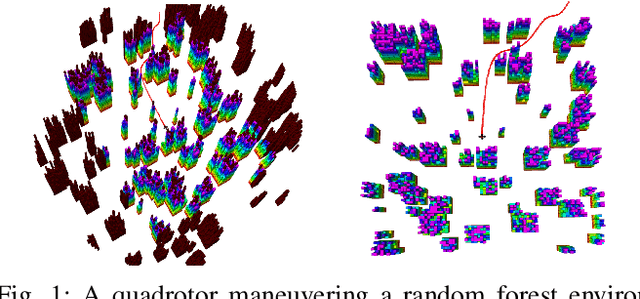
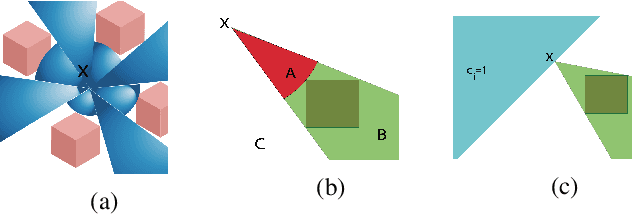
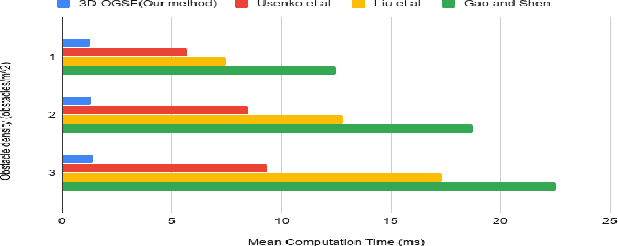
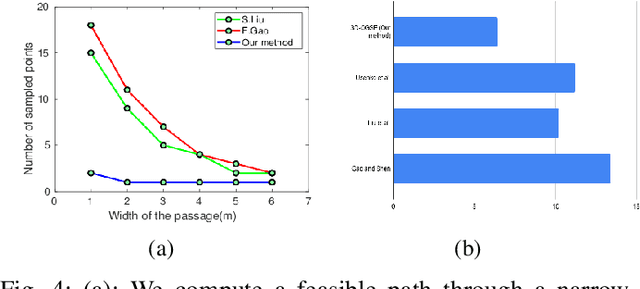
In this letter, we present an online motion planning algorithm for generating smooth, collision-free trajectories for quadrotors operating in an unknown, cluttered 3D environment. Our approach constructs a non-convex safe-region termed generalized shape at each timestep, which represents the obstacle-free region in the environment. A collision-free path is computed by sampling points in the generalized shape and is used to generate a smooth, time-parameterized trajectory by minimizing snap. The generated trajectories are constrained to lie within a convex subset of the generalized shape, which ensures the quadrotor maneuvers in the local obstacle-free space. This process is repeated at each timestep to re-plan trajectories until the quadrotor reaches its goal position. We evaluate the proposed method in simulation on complex 3D environments with high obstacle densities. We observe that each re-planing computation takes $\sim1.6$ milliseconds on a single thread of an Intel Core i5-8500 3.0 GHz CPU. In addition, our method is 6-10x faster than prior online motion planning methods, and we observe less conservative behavior in complex scenarios such as narrow passages.
DCAD: Decentralized Collision Avoidance with Dynamics Constraints for Agile Quadrotor Swarms
Sep 09, 2019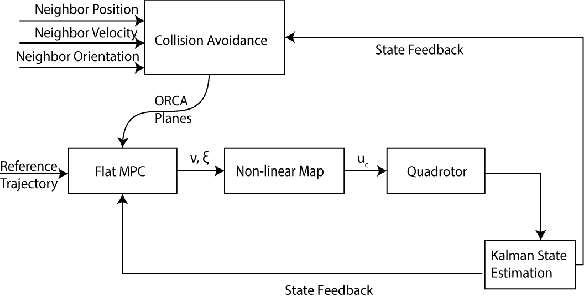
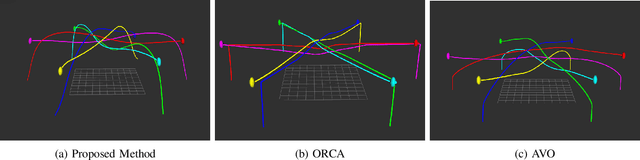
We present a novel, decentralized collision avoidance algorithm for navigating a swarm of quadrotors in dense environments populated with static and dynamic obstacles. Our algorithm relies on the concept of Optimal Reciprocal CollisionAvoidance (ORCA) and utilizes a flatness-based Model Predictive Control (MPC) to generate local collision-free trajectories for each quadrotor. We feedforward linearize the non-linear dynamics of the quadrotor and subsequently use this linearized model in our MPC framework. Our method is downwash conscious and computes safe trajectories that avoid quadrotors from entering each other's downwash regions during close proximity maneuvers. In addition, we account for the uncertainty in sensed position and velocity data using Kalman filtering. We evaluate the performance of our algorithm with other state-of-the-art methods and demonstrate its superior performance in terms of smoothness of generated trajectories and lower probability of collision during high velocity maneuvers.
LSwarm: Efficient Collision Avoidance for Large Swarms with Coverage Constraints in Complex Urban Scenes
Mar 06, 2019
In this paper, we address the problem of collision avoidance for a swarm of UAVs used for continuous surveillance of an urban environment. Our method, LSwarm, efficiently avoids collisions with static obstacles, dynamic obstacles and other agents in 3-D urban environments while considering coverage constraints. LSwarm computes collision avoiding velocities that (i) maximize the conformity of an agent to an optimal path given by a global coverage strategy and (ii) ensure sufficient resolution of the coverage data collected by each agent. Our algorithm is formulated based on ORCA (Optimal Reciprocal Collision Avoidance) and is scalable with respect to the size of the swarm. We evaluate the coverage performance of LSwarm in realistic simulations of a swarm of quadrotors in complex urban models. In practice, our approach can compute collision avoiding velocities for a swarm composed of tens to hundreds of agents in a few milliseconds on dense urban scenes consisting of tens of buildings.