 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeET-Former: Efficient Triplane Deformable Attention for 3D Semantic Scene Completion From Monocular Camera
Oct 14, 2024



We introduce ET-Former, a novel end-to-end algorithm for semantic scene completion using a single monocular camera. Our approach generates a semantic occupancy map from single RGB observation while simultaneously providing uncertainty estimates for semantic predictions. By designing a triplane-based deformable attention mechanism, our approach improves geometric understanding of the scene than other SOTA approaches and reduces noise in semantic predictions. Additionally, through the use of a Conditional Variational AutoEncoder (CVAE), we estimate the uncertainties of these predictions. The generated semantic and uncertainty maps will aid in the formulation of navigation strategies that facilitate safe and permissible decision-making in the future. Evaluated on the Semantic-KITTI dataset, ET-Former achieves the highest IoU and mIoU, surpassing other methods by 15.16% in IoU and 24.24% in mIoU, while reducing GPU memory usage of existing methods by 25%-50.5%.
Lighthouses and Global Graph Stabilization: Active SLAM for Low-compute, Narrow-FoV Robots
Jun 18, 2023



Autonomous exploration to build a map of an unknown environment is a fundamental robotics problem. However, the quality of the map directly influences the quality of subsequent robot operation. Instability in a simultaneous localization and mapping (SLAM) system can lead to poorquality maps and subsequent navigation failures during or after exploration. This becomes particularly noticeable in consumer robotics, where compute budget and limited field-of-view are very common. In this work, we propose (i) the concept of lighthouses: panoramic views with high visual information content that can be used to maintain the stability of the map locally in their neighborhoods and (ii) the final stabilization strategy for global pose graph stabilization. We call our novel exploration strategy SLAM-aware exploration (SAE) and evaluate its performance on real-world home environments.
* 7 pages, 7 figures
DS-MPEPC: Safe and Deadlock-Avoiding Robot Navigation in Cluttered Dynamic Scenes
Mar 17, 2023We present an algorithm for safe robot navigation in complex dynamic environments using a variant of model predictive equilibrium point control. We use an optimization formulation to navigate robots gracefully in dynamic environments by optimizing over a trajectory cost function at each timestep. We present a novel trajectory cost formulation that significantly reduces the conservative and deadlock behaviors and generates smooth trajectories. In particular, we propose a new collision probability function that effectively captures the risk associated with a given configuration and the time to avoid collisions based on the velocity direction. Moreover, we propose a terminal state cost based on the expected time-to-goal and time-to-collision values that helps in avoiding trajectories that could result in deadlock. We evaluate our cost formulation in multiple simulated and real-world scenarios, including narrow corridors with dynamic obstacles, and observe significantly improved navigation behavior and reduced deadlocks as compared to prior methods.
Unified Simultaneous Wireless Information and Power Transfer for IoT: Signaling and Architecture with Deep Learning Adaptive Control
Jun 26, 2021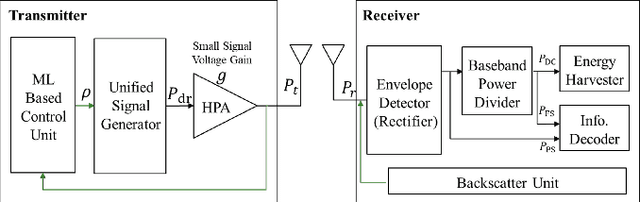

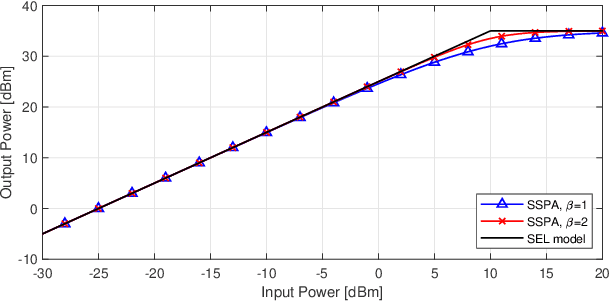
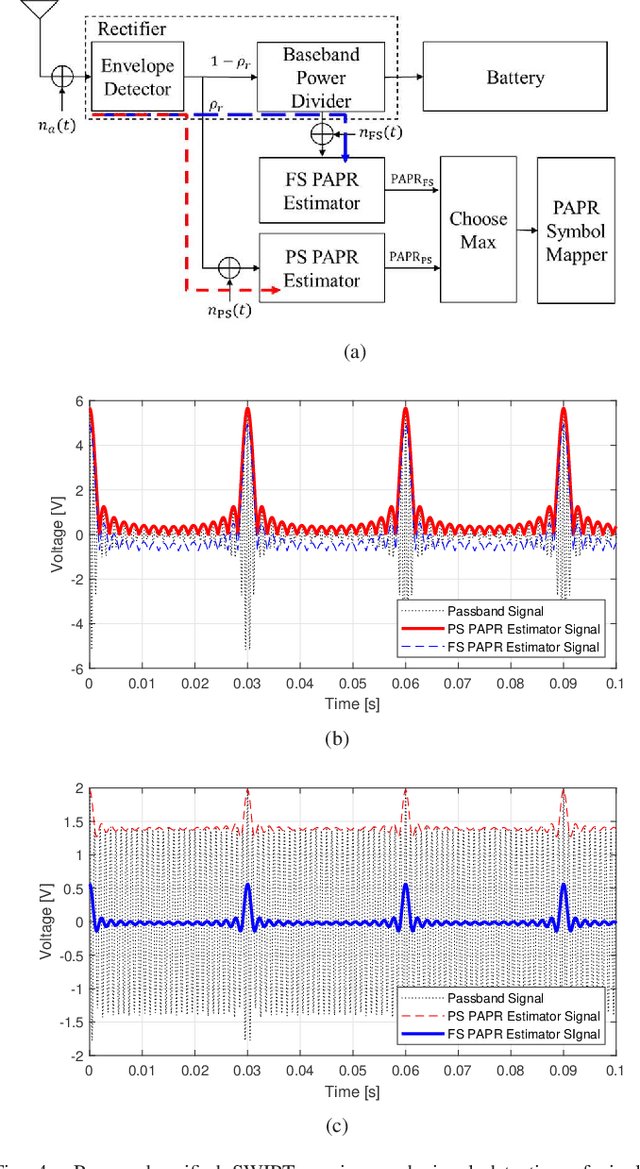
In this paper, we propose a unified SWIPT signal and its architecture design in order to take advantage of both single tone and multi-tone signaling by adjusting only the power allocation ratio of a unified signal. For this, we design a novel unified and integrated receiver architecture for the proposed unified SWIPT signaling, which consumes low power with an envelope detection. To relieve the computational complexity of the receiver, we propose an adaptive control algorithm by which the transmitter adjusts the communication mode through temporal convolutional network (TCN) based asymmetric processing. To this end, the transmitter optimizes the modulation index and power allocation ratio in short-term scale while updating the mode switching threshold in long-term scale. We demonstrate that the proposed unified SWIPT system improves the achievable rate under the self-powering condition of low-power IoT devices. Consequently it is foreseen to effectively deploy low-power IoT networks that concurrently supply both information and energy wirelessly to the devices by using the proposed unified SWIPT and adaptive control algorithm in place at the transmitter side.