 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussianSSC: Triplane-Guided Directional Gaussian Fields for 3D Semantic Completion
Mar 23, 2026We present \emph{GaussianSSC}, a two-stage, grid-native and triplane-guided approach to semantic scene completion (SSC) that injects the benefits of Gaussians without replacing the voxel grid or maintaining a separate Gaussian set. We introduce \emph{Gaussian Anchoring}, a sub-pixel, Gaussian-weighted image aggregation over fused FPN features that tightens voxel--image alignment and improves monocular occupancy estimation. We further convert point-like voxel features into a learned per-voxel Gaussian field and refine triplane features via a triplane-aligned \emph{Gaussian--Triplane Refinement} module that combines \emph{local gathering} (target-centric) and \emph{global aggregation} (source-centric). This directional, anisotropic support captures surface tangency, scale, and occlusion-aware asymmetry while preserving the efficiency of triplane representations. On SemanticKITTI~\cite{behley2019semantickitti}, GaussianSSC improves Stage~1 occupancy by +1.0\% Recall, +2.0\% Precision, and +1.8\% IoU over state-of-the-art baselines, and improves Stage~2 semantic prediction by +1.8\% IoU and +0.8\% mIoU.
Region Based SLAM-Aware Exploration: Efficient and Robust Autonomous Mapping Strategy That Can Scale
Apr 14, 2025Autonomous exploration for mapping unknown large scale environments is a fundamental challenge in robotics, with efficiency in time, stability against map corruption and computational resources being crucial. This paper presents a novel approach to indoor exploration that addresses these key issues in existing methods. We introduce a Simultaneous Localization and Mapping (SLAM)-aware region-based exploration strategy that partitions the environment into discrete regions, allowing the robot to incrementally explore and stabilize each region before moving to the next one. This approach significantly reduces redundant exploration and improves overall efficiency. As the device finishes exploring a region and stabilizes it, we also perform SLAM keyframe marginalization, a technique which reduces problem complexity by eliminating variables, while preserving their essential information. To improves robustness and further enhance efficiency, we develop a check- point system that enables the robot to resume exploration from the last stable region in case of failures, eliminating the need for complete re-exploration. Our method, tested in real homes, office and simulations, outperforms state-of-the-art approaches. The improvements demonstrate substantial enhancements in various real world environments, with significant reductions in keyframe usage (85%), submap usage (50% office, 32% home), pose graph optimization time (78-80%), and exploration duration (10-15%). This region-based strategy with keyframe marginalization offers an efficient solution for autonomous robotic mapping.
ET-Former: Efficient Triplane Deformable Attention for 3D Semantic Scene Completion From Monocular Camera
Oct 14, 2024



We introduce ET-Former, a novel end-to-end algorithm for semantic scene completion using a single monocular camera. Our approach generates a semantic occupancy map from single RGB observation while simultaneously providing uncertainty estimates for semantic predictions. By designing a triplane-based deformable attention mechanism, our approach improves geometric understanding of the scene than other SOTA approaches and reduces noise in semantic predictions. Additionally, through the use of a Conditional Variational AutoEncoder (CVAE), we estimate the uncertainties of these predictions. The generated semantic and uncertainty maps will aid in the formulation of navigation strategies that facilitate safe and permissible decision-making in the future. Evaluated on the Semantic-KITTI dataset, ET-Former achieves the highest IoU and mIoU, surpassing other methods by 15.16% in IoU and 24.24% in mIoU, while reducing GPU memory usage of existing methods by 25%-50.5%.
Synthesis of Stabilizing Recurrent Equilibrium Network Controllers
Mar 31, 2022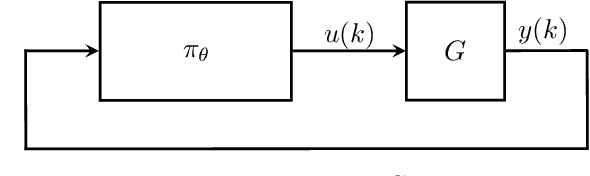
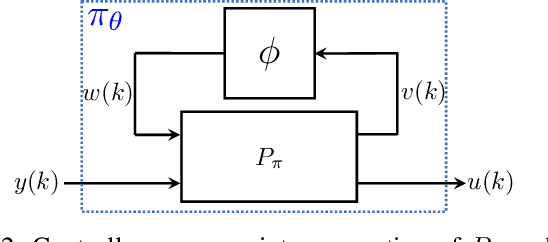

We propose a parameterization of a nonlinear dynamic controller based on the recurrent equilibrium network, a generalization of the recurrent neural network. We derive constraints on the parameterization under which the controller guarantees exponential stability of a partially observed dynamical system with sector-bounded nonlinearities. Finally, we present a method to synthesize this controller using projected policy gradient methods to maximize a reward function with arbitrary structure. The projection step involves the solution of convex optimization problems. We demonstrate the proposed method with simulated examples of controlling nonlinear plants, including plants modeled with neural networks.
Learning Neural Networks under Input-Output Specifications
Feb 23, 2022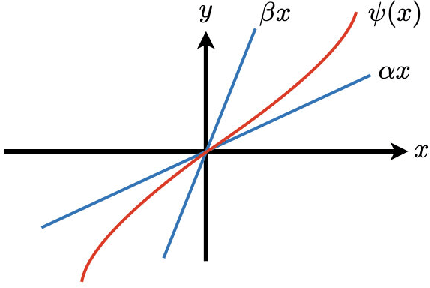
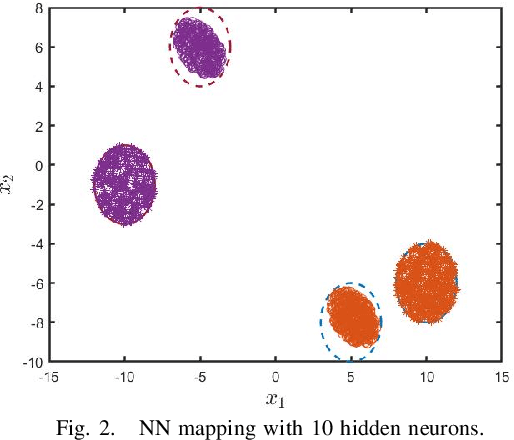
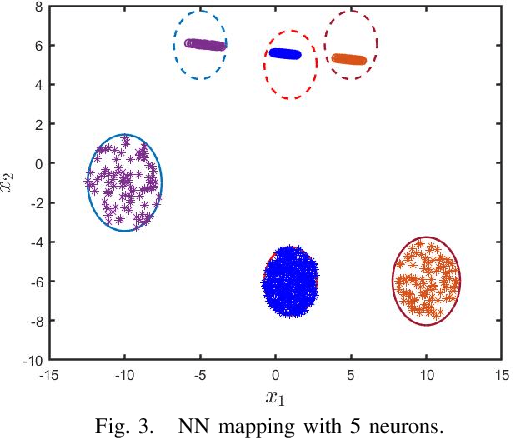
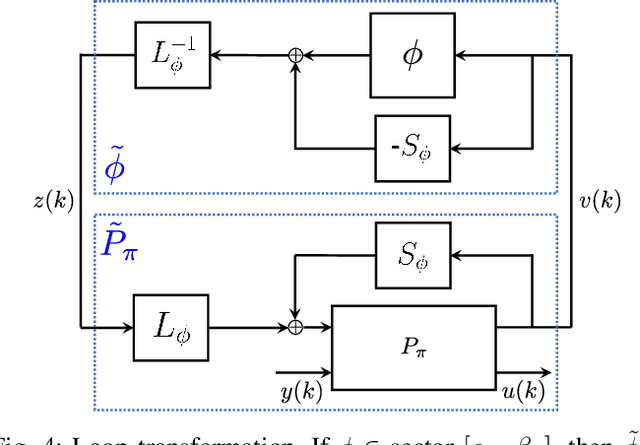
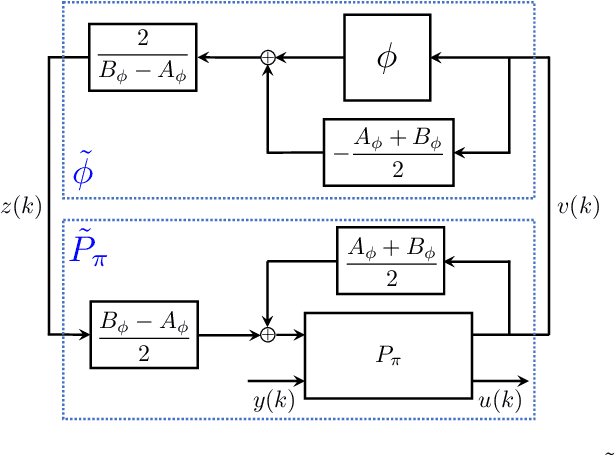
In this paper, we examine an important problem of learning neural networks that certifiably meet certain specifications on input-output behaviors. Our strategy is to find an inner approximation of the set of admissible policy parameters, which is convex in a transformed space. To this end, we address the key technical challenge of convexifying the verification condition for neural networks, which is derived by abstracting the nonlinear specifications and activation functions with quadratic constraints. In particular, we propose a reparametrization scheme of the original neural network based on loop transformation, which leads to a convex condition that can be enforced during learning. This theoretical construction is validated in an experiment that specifies reachable sets for different regions of inputs.
Recurrent Neural Network Controllers Synthesis with Stability Guarantees for Partially Observed Systems
Sep 08, 2021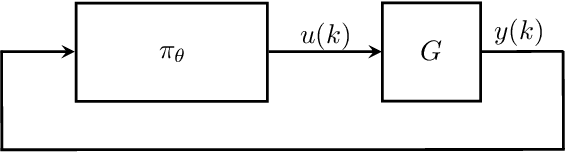
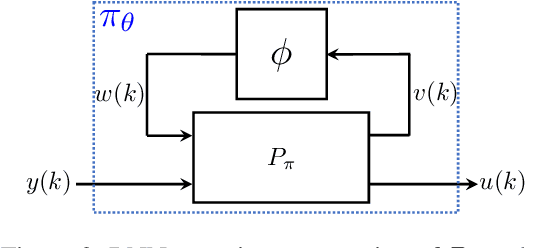
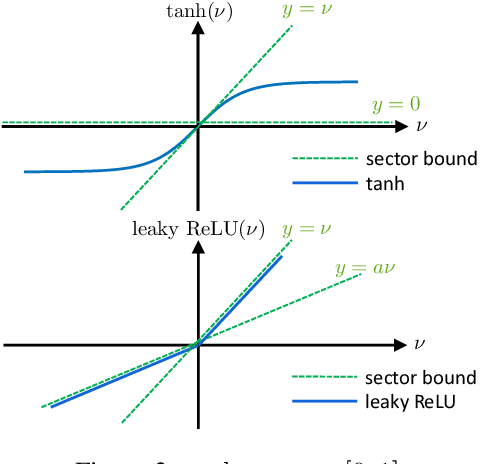
Neural network controllers have become popular in control tasks thanks to their flexibility and expressivity. Stability is a crucial property for safety-critical dynamical systems, while stabilization of partially observed systems, in many cases, requires controllers to retain and process long-term memories of the past. We consider the important class of recurrent neural networks (RNN) as dynamic controllers for nonlinear uncertain partially-observed systems, and derive convex stability conditions based on integral quadratic constraints, S-lemma and sequential convexification. To ensure stability during the learning and control process, we propose a projected policy gradient method that iteratively enforces the stability conditions in the reparametrized space taking advantage of mild additional information on system dynamics. Numerical experiments show that our method learns stabilizing controllers while using fewer samples and achieving higher final performance compared with policy gradient.
Co-design of Control and Planning for Multi-rotor UAVs with Signal Temporal Logic Specifications
Sep 30, 2020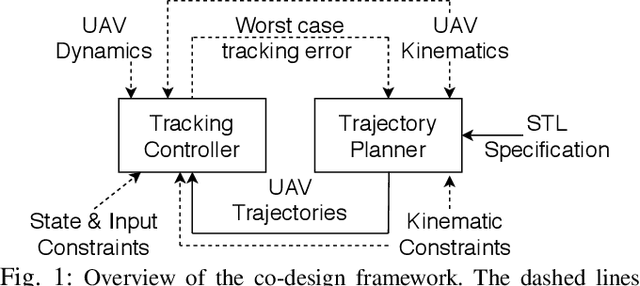
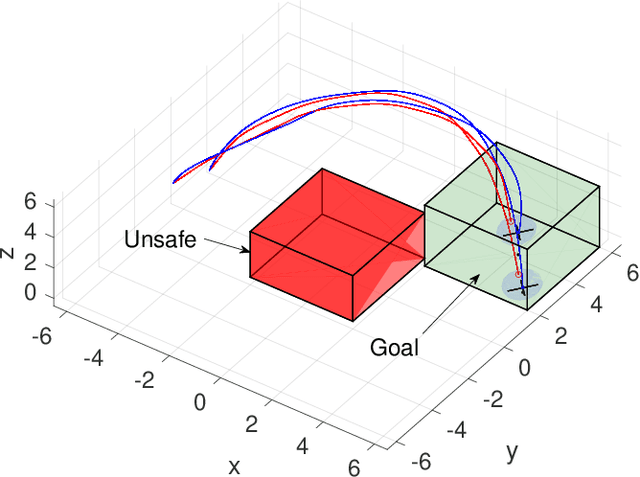
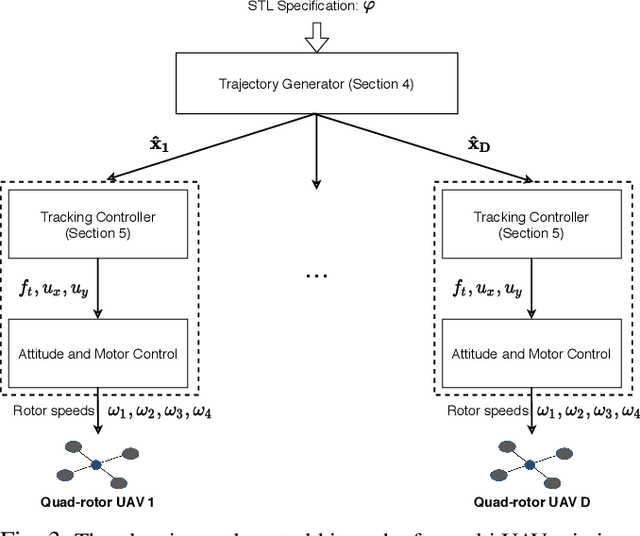
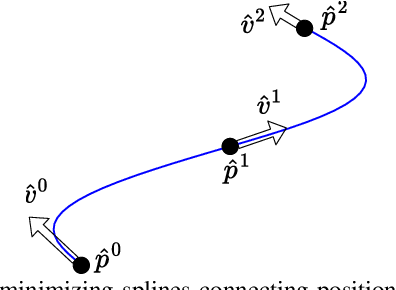
Urban Air Mobility (UAM), or the scenario where multiple manned and Unmanned Aerial Vehicles (UAVs) carry out various tasks over urban airspaces, is a transportation concept of the future that is gaining prominence. UAM missions with complex spatial, temporal and reactive requirements can be succinctly represented using Signal Temporal Logic (STL), a behavioral specification language. However, planning and control of systems with STL specifications is computationally intensive, usually resulting in planning approaches that do not guarantee dynamical feasibility, or control approaches that cannot handle complex STL specifications. Here, we present an approach to co-design the planner and control such that a given STL specification (possibly over multiple UAVs) is satisfied with trajectories that are dynamically feasible and our controller can track them with a bounded tracking-error that the planner accounts for. The tracking controller is formulated for the non-linear dynamics of the individual UAVs, and the tracking error bound is computed for this controller when the trajectories satisfy some kinematic constraints. We also augment an existing multi-UAV STL-based trajectory generator in order to generate trajectories that satisfy such constraints. We show that this co-design allows for trajectories that satisfy a given STL specification, and are also dynamically feasible in the sense that they can be tracked with bounded error. The applicability of this approach is demonstrated through simulations of multi-UAV missions.