 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Step Gaussian Process Propagation for Adaptive Path Planning
Apr 21, 2026Efficient and robust path planning hinges on combining all accessible information sources. In particular, the task of path planning for robotic environmental exploration and monitoring depends highly on the current belief of the world. To capture the uncertainty in the belief, we present a Gaussian process based path planning method that adapts to multi-modal environmental sensing data and incorporates state and input constraints. To solve the path planning problem, we optimize over future waypoints in a receding horizon fashion, and our cost is thus a function of the Gaussian process posterior over all these waypoints. We demonstrate this method, dubbed OLAhGP, on an autonomous surface vessel using oceanic algal bloom data from both a high-fidelity model and in-situ sensing data in a monitoring scenario. Our simulated and experimental results demonstrate significant improvement over existing methods. With the same number of samples, our method generates more informative paths and achieves greater accuracy in identifying algal blooms in chlorophyll a rich waters, measured with respect to total misclassification probability and binary misclassification rate over the domain of interest.
Congestion Reduction in EV Charger Placement Using Traffic Equilibrium Models
Dec 12, 2025



Growing EV adoption can worsen traffic conditions if chargers are sited without regard to their impact on congestion. We study how to strategically place EV chargers to reduce congestion using two equilibrium models: one based on congestion games and one based on an atomic queueing simulation. We apply both models within a scalable greedy station-placement algorithm. Experiments show that this greedy scheme yields optimal or near-optimal congestion outcomes in realistic networks, even though global optimality is not guaranteed as we show with a counterexample. We also show that the queueing-based approach yields more realistic results than the congestion-game model, and we present a unified methodology that calibrates congestion delays from queue simulation and solves equilibrium in link-space.
Falsification-Driven Reinforcement Learning for Maritime Motion Planning
Oct 08, 2025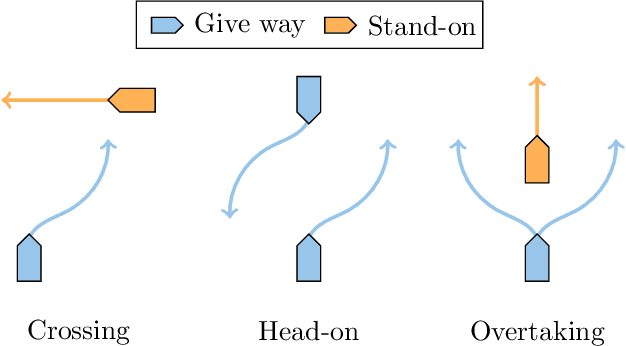



Compliance with maritime traffic rules is essential for the safe operation of autonomous vessels, yet training reinforcement learning (RL) agents to adhere to them is challenging. The behavior of RL agents is shaped by the training scenarios they encounter, but creating scenarios that capture the complexity of maritime navigation is non-trivial, and real-world data alone is insufficient. To address this, we propose a falsification-driven RL approach that generates adversarial training scenarios in which the vessel under test violates maritime traffic rules, which are expressed as signal temporal logic specifications. Our experiments on open-sea navigation with two vessels demonstrate that the proposed approach provides more relevant training scenarios and achieves more consistent rule compliance.
Set Invariance with Probability One for Controlled Diffusion: Score-based Approach
Jul 30, 2025Given a controlled diffusion and a connected, bounded, Lipschitz set, when is it possible to guarantee controlled set invariance with probability one? In this work, we answer this question by deriving the necessary and sufficient conditions for the same in terms of gradients of certain log-likelihoods -- a.k.a. score vector fields -- for two cases: given finite time horizon and infinite time horizon. The deduced conditions comprise a score-based test that provably certifies or falsifies the existence of Markovian controllers for given controlled set invariance problem data. Our results are constructive in the sense when the problem data passes the proposed test, we characterize all controllers guaranteeing the desired set invariance. When the problem data fails the proposed test, there does not exist a controller that can accomplish the desired set invariance with probability one. The computation in the proposed tests involve solving certain Dirichlet boundary value problems, and in the finite horizon case, can also account for additional constraint of hitting a target subset at the terminal time. We illustrate the results using several semi-analytical and numerical examples.
Learning to Drive by Imitating Surrounding Vehicles
Mar 08, 2025



Imitation learning is a promising approach for training autonomous vehicles (AV) to navigate complex traffic environments by mimicking expert driver behaviors. However, a major challenge in this paradigm lies in effectively utilizing available driving data, as collecting new data is resource-intensive and often limited in its ability to cover diverse driving scenarios. While existing imitation learning frameworks focus on leveraging expert demonstrations, they often overlook the potential of additional complex driving data from surrounding traffic participants. In this paper, we propose a data augmentation strategy that enhances imitation learning by leveraging the observed trajectories of nearby vehicles, captured through the AV's sensors, as additional expert demonstrations. We introduce a vehicle selection sampling strategy that prioritizes informative and diverse driving behaviors, contributing to a richer and more diverse dataset for training. We evaluate our approach using the state-of-the-art learning-based planning method PLUTO on the nuPlan dataset and demonstrate that our augmentation method leads to improved performance in complex driving scenarios. Specifically, our method reduces collision rates and improves safety metrics compared to the baseline. Notably, even when using only 10% of the original dataset, our method achieves performance comparable to that of the full dataset, with improved collision rates. Our findings highlight the importance of leveraging diverse real-world trajectory data in imitation learning and provide insights into data augmentation strategies for autonomous driving.
Intelligent Sailing Model for Open Sea Navigation
Jan 09, 2025



Autonomous vessels potentially enhance safety and reliability of seaborne trade. To facilitate the development of autonomous vessels, high-fidelity simulations are required to model realistic interactions with other vessels. However, modeling realistic interactive maritime traffic is challenging due to the unstructured environment, coarsely specified traffic rules, and largely varying vessel types. Currently, there is no standard for simulating interactive maritime environments in order to rigorously benchmark autonomous vessel algorithms. In this paper, we introduce the first intelligent sailing model (ISM), which simulates rule-compliant vessels for navigation on the open sea. An ISM vessel reacts to other traffic participants according to maritime traffic rules while at the same time solving a motion planning task characterized by waypoints. In particular, the ISM monitors the applicable rules, generates rule-compliant waypoints accordingly, and utilizes a model predictive control for tracking the waypoints. We evaluate the ISM in two environments: interactive traffic with only ISM vessels and mixed traffic where some vessel trajectories are from recorded real-world maritime traffic data or handcrafted for criticality. Our results show that simulations with many ISM vessels of different vessel types are rule-compliant and scalable. We tested 4,049 critical traffic scenarios. For interactive traffic with ISM vessels, no collisions occurred while goal-reaching rates of about 97 percent were achieved. We believe that our ISM can serve as a standard for challenging and realistic maritime traffic simulation to accelerate autonomous vessel development.
Synthesizing Neural Network Controllers with Closed-Loop Dissipativity Guarantees
Apr 10, 2024



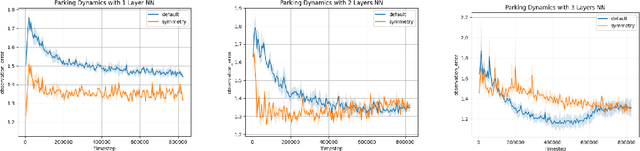
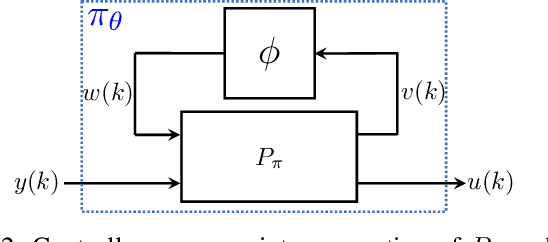
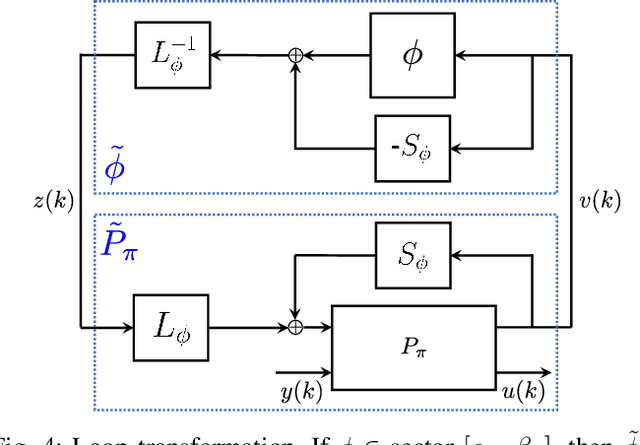
In this paper, a method is presented to synthesize neural network controllers such that the feedback system of plant and controller is dissipative, certifying performance requirements such as L2 gain bounds. The class of plants considered is that of linear time-invariant (LTI) systems interconnected with an uncertainty, including nonlinearities treated as an uncertainty for convenience of analysis. The uncertainty of the plant and the nonlinearities of the neural network are both described using integral quadratic constraints (IQCs). First, a dissipativity condition is derived for uncertain LTI systems. Second, this condition is used to construct a linear matrix inequality (LMI) which can be used to synthesize neural network controllers. Finally, this convex condition is used in a projection-based training method to synthesize neural network controllers with dissipativity guarantees. Numerical examples on an inverted pendulum and a flexible rod on a cart are provided to demonstrate the effectiveness of this approach.
Exploiting Symmetry in Dynamics for Model-Based Reinforcement Learning with Asymmetric Rewards
Mar 27, 2024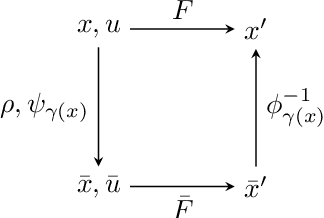
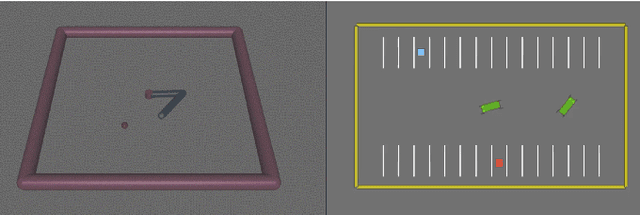
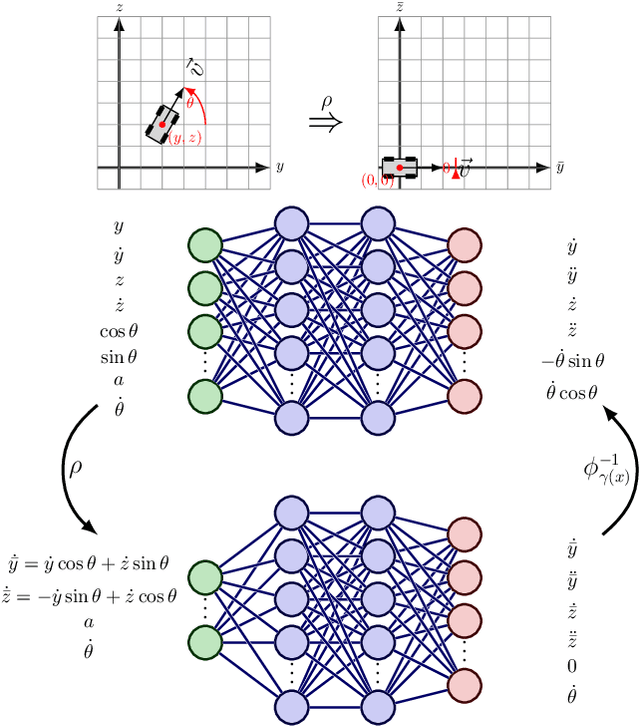
Recent work in reinforcement learning has leveraged symmetries in the model to improve sample efficiency in training a policy. A commonly used simplifying assumption is that the dynamics and reward both exhibit the same symmetry. However, in many real-world environments, the dynamical model exhibits symmetry independent of the reward model: the reward may not satisfy the same symmetries as the dynamics. In this paper, we investigate scenarios where only the dynamics are assumed to exhibit symmetry, extending the scope of problems in reinforcement learning and learning in control theory where symmetry techniques can be applied. We use Cartan's moving frame method to introduce a technique for learning dynamics which, by construction, exhibit specified symmetries. We demonstrate through numerical experiments that the proposed method learns a more accurate dynamical model.
Exact Recovery for System Identification with More Corrupt Data than Clean Data
May 17, 2023In this paper, we study the system identification problem for linear discrete-time systems under adversaries and analyze two lasso-type estimators. We study both asymptotic and non-asymptotic properties of these estimators in two separate scenarios, corresponding to deterministic and stochastic models for the attack times. Since the samples collected from the system are correlated, the existing results on lasso are not applicable. We show that when the system is stable and the attacks are injected periodically, the sample complexity for the exact recovery of the system dynamics is O(n), where n is the dimension of the states. When the adversarial attacks occur at each time instance with probability p, the required sample complexity for the exact recovery scales as O(\log(n)p/(1-p)^2). This result implies the almost sure convergence to the true system dynamics under the asymptotic regime. As a by-product, even when more than half of the data is compromised, our estimators still learn the system correctly. This paper provides the first mathematical guarantee in the literature on learning from correlated data for dynamical systems in the case when there is less clean data than corrupt data.
Synthesis of Stabilizing Recurrent Equilibrium Network Controllers
Mar 31, 2022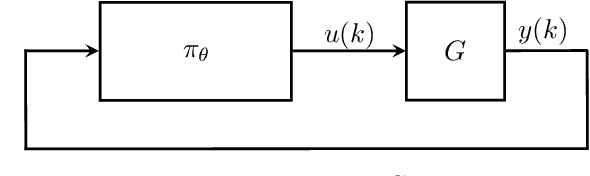

We propose a parameterization of a nonlinear dynamic controller based on the recurrent equilibrium network, a generalization of the recurrent neural network. We derive constraints on the parameterization under which the controller guarantees exponential stability of a partially observed dynamical system with sector-bounded nonlinearities. Finally, we present a method to synthesize this controller using projected policy gradient methods to maximize a reward function with arbitrary structure. The projection step involves the solution of convex optimization problems. We demonstrate the proposed method with simulated examples of controlling nonlinear plants, including plants modeled with neural networks.