 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS-GBT: Smooth Growth Bound Tensor for Certified Robustness Against Word Substitution Attacks in NLP
Jun 11, 2026Despite recent progress in Natural Language Processing (NLP), models remain vulnerable to word substitution attacks. Most existing defenses focus on first order sensitivity and measure how much the output changes when the input is slightly perturbed. However, they ignore how this sensitivity evolves, which is described by curvature. When gradients vary sharply, models can still fail. This paper introduces the Smooth Growth Bound Tensor (S-GBT), a second order method that bounds the Hessian element-wise, for which we provide formal theoretical proofs on the resulting robustness bounds. A regularization term is added during training to minimize these bounds. This yields tighter certified robustness against word substitution attacks. The change in the output under word substitution is bounded by both a linear term and a quadratic term. S-GBT is derived for two architectures: Long Short-Term Memory (LSTM) and Convolutional Neural Networks (CNN). The method is integrated directly into the training objective. Its effectiveness is evaluated on multiple benchmark datasets. The results show that combining first and second order regularization improves certified robust accuracy by up to 23.4% compared to prior methods, while clean accuracy remains competitive. These findings indicate that controlling both the gradient and its variation is a promising direction for building more robust models.
Safety by Invariance, Liveness through Refinement: Heterogeneous Contract Framework for Co-Design of Layered Control
May 05, 2026Real-world control systems must achieve long-horizon objectives (liveness) while respecting continuous-time safety constraints, a combination that motivates hierarchical layered control architectures (LCAs). Existing LCA research, however, lacks (i) a uniform specification language across discrete planning and continuous execution, (ii) formal guarantees that specifications are preserved when interconnecting subsystems at heterogeneous time scales, and (iii) compositional separation between layers, owing to reliance on naive input-filtering laws. This paper addresses all three gaps by importing the safety--liveness decomposition into a heterogeneous assume--guarantee framework: \emph{safety is enforced by invariance} at the continuous-time layer, while \emph{liveness is achieved through refinement} at the discrete-time layer, with inter-layer coordination formalized via vertical refinement and timing-compatibility conditions. We instantiate this contract with a novel LCA combining an MPC planner, an input-to-state stabilizing (ISS) low-level controller, and a reference-governor bridge, and validate it on a Hybrid Energy Storage System (HESS) comprising a battery and a supercapacitor.
Energy Efficient Aerial RIS: Phase Shift Optimization and Trajectory Design
Jul 25, 2024Reconfigurable Intelligent Surface (RIS) technology has gained significant attention due to its ability to enhance the performance of wireless communication systems. The main advantage of RIS is that it can be strategically placed in the environment to control wireless signals, enabling improvements in coverage, capacity, and energy efficiency. In this paper, we investigate a scenario in which a drone, equipped with a RIS, travels from an initial point to a target destination. In this scenario, the aerial RIS (ARIS) is deployed to establish a direct link between the base station and obstructed users. Our objective is to maximize the energy efficiency of the ARIS while taking into account its dynamic model including its velocity and acceleration along with the phase shift of the RIS. To this end, we formulate the energy efficiency problem under the constraints of the dynamic model of the drone. The studied problem is challenging to solve. To address this, we proceed as follows. First, we introduce an efficient solution that involves decoupling the phase shift optimization and the trajectory design. Specifically, the closed-form expression of the phase-shift is obtained using a convex approximation, which is subsequently integrated into the trajectory design problem. We then employ tools inspired by economic model predictive control (EMPC) to solve the resulting trajectory optimization. Our simulation results show a significant improvement in energy efficiency against the scenario where the dynamic model of the UAV is ignored.
Scenario Convex Programs for Dexterous Manipulation under Modeling Uncertainties
Jul 16, 2024This paper proposes a new framework to design a controller for the dexterous manipulation of an object by a multi-fingered hand. To achieve a robust manipulation and wide range of operations, the uncertainties on the location of the contact point and multiple operating points are taken into account in the control design by sampling the state space. The proposed control strategy is based on a robust pole placement using LMIs. Moreover, to handle uncertainties and different operating points, we recast our problem as a robust convex program (RCP). We then consider the original RCP as a scenario convex program (SCP) and solve the SCP by sampling the uncertain grasp map parameter and operating points in the state space. For a required probabilistic level of confidence, we quantify the feasibility of the SCP solution based on the number of sampling points. The control strategy is tested in simulation in a case study with contact location error and different initial grasps.
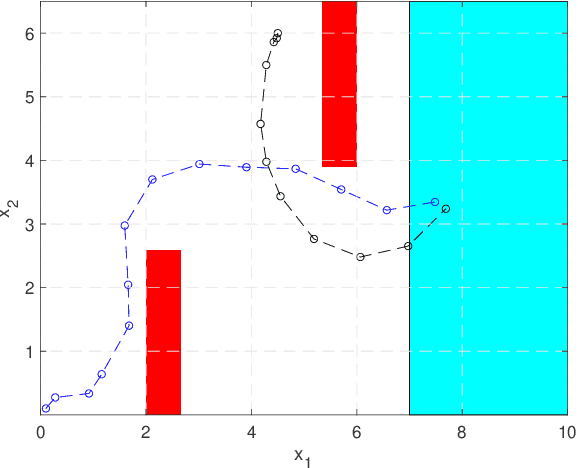
How to discretize continuous state-action spaces in Q-learning: A symbolic control approach
Jun 04, 2024



Q-learning is widely recognized as an effective approach for synthesizing controllers to achieve specific goals. However, handling challenges posed by continuous state-action spaces remains an ongoing research focus. This paper presents a systematic analysis that highlights a major drawback in space discretization methods. To address this challenge, the paper proposes a symbolic model that represents behavioral relations, such as alternating simulation from abstraction to the controlled system. This relation allows for seamless application of the synthesized controller based on abstraction to the original system. Introducing a novel Q-learning technique for symbolic models, the algorithm yields two Q-tables encoding optimal policies. Theoretical analysis demonstrates that these Q-tables serve as both upper and lower bounds on the Q-values of the original system with continuous spaces. Additionally, the paper explores the correlation between the parameters of the space abstraction and the loss in Q-values. The resulting algorithm facilitates achieving optimality within an arbitrary accuracy, providing control over the trade-off between accuracy and computational complexity. The obtained results provide valuable insights for selecting appropriate learning parameters and refining the controller. The engineering relevance of the proposed Q-learning based symbolic model is illustrated through two case studies.
Symbolic Abstractions From Data: A PAC Learning Approach
Apr 28, 2021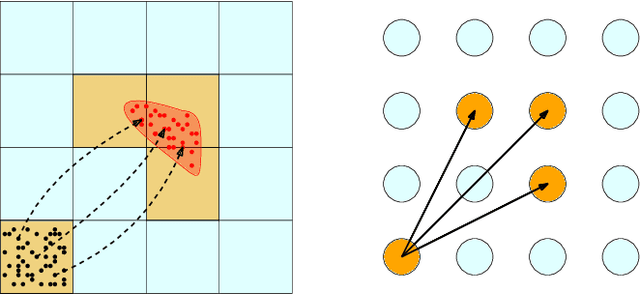
Symbolic control techniques aim to satisfy complex logic specifications. A critical step in these techniques is the construction of a symbolic (discrete) abstraction, a finite-state system whose behaviour mimics that of a given continuous-state system. The methods used to compute symbolic abstractions, however, require knowledge of an accurate closed-form model. To generalize them to systems with unknown dynamics, we present a new data-driven approach that does not require closed-form dynamics, instead relying only the ability to evaluate successors of each state under given inputs. To provide guarantees for the learned abstraction, we use the Probably Approximately Correct (PAC) statistical framework. We first introduce a PAC-style behavioural relationship and an appropriate refinement procedure. We then show how the symbolic abstraction can be constructed to satisfy this new behavioural relationship. Moreover, we provide PAC bounds that dictate the number of data required to guarantee a prescribed level of accuracy and confidence. Finally, we present an illustrative example.