 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-Aware UAV Command and Control for Efficient IoT Data Collection
Apr 09, 2026Unmanned Aerial Vehicles (UAVs) have emerged as a key enabler technology for data collection from Internet of Things (IoT) devices. However, effective data collection is challenged by resource constraints and the need for real-time decision-making. In this work, we propose a novel framework that integrates semantic communication with UAV command-and-control (C&C) to enable efficient image data collection from IoT devices. Each device uses Deep Joint Source-Channel Coding (DeepJSCC) to generate a compact semantic latent representation of its image to enable image reconstruction even under partial transmission. A base station (BS) controls the UAV's trajectory by transmitting acceleration commands. The objective is to maximize the average quality of reconstructed images by maintaining proximity to each device for a sufficient duration within a fixed time horizon. To address the challenging trade-off and account for delayed C&C signals, we model the problem as a Markov Decision Process and propose a Double Deep Q-Learning (DDQN)-based adaptive flight policy. Simulation results show that our approach outperforms baseline methods such as greedy and traveling salesman algorithms, in both device coverage and semantic reconstruction quality.
Robust Planning and Control of Omnidirectional MRAVs for Aerial Communications in Wireless Networks
Apr 21, 2025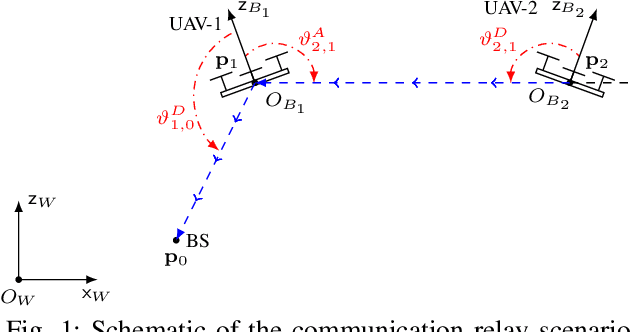
A new class of Multi-Rotor Aerial Vehicles (MRAVs), known as omnidirectional MRAVs (o-MRAVs), has gained attention for their ability to independently control 3D position and orientation. This capability enhances robust planning and control in aerial communication networks, enabling more adaptive trajectory planning and precise antenna alignment without additional mechanical components. These features are particularly valuable in uncertain environments, where disturbances such as wind and interference affect communication stability. This paper examines o-MRAVs in the context of robust aerial network planning, comparing them with the more common under-actuated MRAVs (u-MRAVs). Key applications, including physical layer security, optical communications, and network densification, are highlighted, demonstrating the potential of o-MRAVs to improve reliability and efficiency in dynamic communication scenarios.
Reshaping UAV-Enabled Communications with Omnidirectional Multi-Rotor Aerial Vehicles
Nov 04, 2024



A new class of Multi-Rotor Aerial Vehicles (MRAVs), known as omnidirectional MRAVs (o-MRAVs), has attracted significant interest in the robotics community. These MRAVs have the unique capability of independently controlling their 3D position and 3D orientation. In the context of aerial communication networks, this translates into the ability to control the position and orientation of the antenna mounted on the MRAV without any additional devices tasked for antenna orientation. This additional Degrees of Freedom (DoF) adds a new dimension to aerial communication systems, creating various research opportunities in communications-aware trajectory planning and positioning. This paper presents this new class of MRAVs and discusses use cases in areas such as physical layer security and optical communications. Furthermore, the benefits of these MRAVs are illustrated with realistic simulation scenarios. Finally, new research problems and opportunities introduced by this advanced robotics technology are discussed.
Harnessing the Potential of Omnidirectional Multi-Rotor Aerial Vehicles in Cooperative Jamming Against Eavesdropping
Aug 19, 2024



Recent research in communications-aware robotics has been propelled by advancements in 5G and emerging 6G technologies. This field now includes the integration of Multi-Rotor Aerial Vehicles (MRAVs) into cellular networks, with a specific focus on under-actuated MRAVs. These vehicles face challenges in independently controlling position and orientation due to their limited control inputs, which adversely affects communication metrics such as Signal-to-Noise Ratio. In response, a newer class of omnidirectional MRAVs has been developed, which can control both position and orientation simultaneously by tilting their propellers. However, exploiting this capability fully requires sophisticated motion planning techniques. This paper presents a novel application of omnidirectional MRAVs designed to enhance communication security and thwart eavesdropping. It proposes a strategy where one MRAV functions as an aerial Base Station, while another acts as a friendly jammer to secure communications. This study is the first to apply such a strategy to MRAVs in scenarios involving eavesdroppers.
Energy Efficient Aerial RIS: Phase Shift Optimization and Trajectory Design
Jul 25, 2024Reconfigurable Intelligent Surface (RIS) technology has gained significant attention due to its ability to enhance the performance of wireless communication systems. The main advantage of RIS is that it can be strategically placed in the environment to control wireless signals, enabling improvements in coverage, capacity, and energy efficiency. In this paper, we investigate a scenario in which a drone, equipped with a RIS, travels from an initial point to a target destination. In this scenario, the aerial RIS (ARIS) is deployed to establish a direct link between the base station and obstructed users. Our objective is to maximize the energy efficiency of the ARIS while taking into account its dynamic model including its velocity and acceleration along with the phase shift of the RIS. To this end, we formulate the energy efficiency problem under the constraints of the dynamic model of the drone. The studied problem is challenging to solve. To address this, we proceed as follows. First, we introduce an efficient solution that involves decoupling the phase shift optimization and the trajectory design. Specifically, the closed-form expression of the phase-shift is obtained using a convex approximation, which is subsequently integrated into the trajectory design problem. We then employ tools inspired by economic model predictive control (EMPC) to solve the resulting trajectory optimization. Our simulation results show a significant improvement in energy efficiency against the scenario where the dynamic model of the UAV is ignored.
Ensemble DNN for Age-of-Information Minimization in UAV-assisted Networks
Sep 06, 2023This paper addresses the problem of Age-of-Information (AoI) in UAV-assisted networks. Our objective is to minimize the expected AoI across devices by optimizing UAVs' stopping locations and device selection probabilities. To tackle this problem, we first derive a closed-form expression of the expected AoI that involves the probabilities of selection of devices. Then, we formulate the problem as a non-convex minimization subject to quality of service constraints. Since the problem is challenging to solve, we propose an Ensemble Deep Neural Network (EDNN) based approach which takes advantage of the dual formulation of the studied problem. Specifically, the Deep Neural Networks (DNNs) in the ensemble are trained in an unsupervised manner using the Lagrangian function of the studied problem. Our experiments show that the proposed EDNN method outperforms traditional DNNs in reducing the expected AoI, achieving a remarkable reduction of $29.5\%$.
Muti-Agent Proximal Policy Optimization For Data Freshness in UAV-assisted Networks
Mar 15, 2023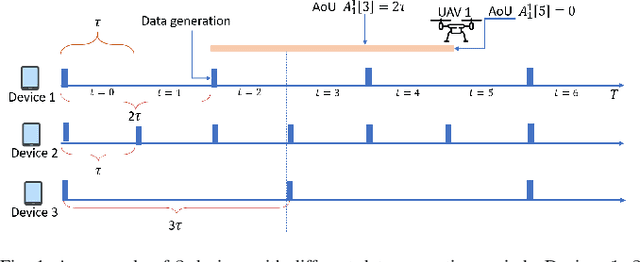
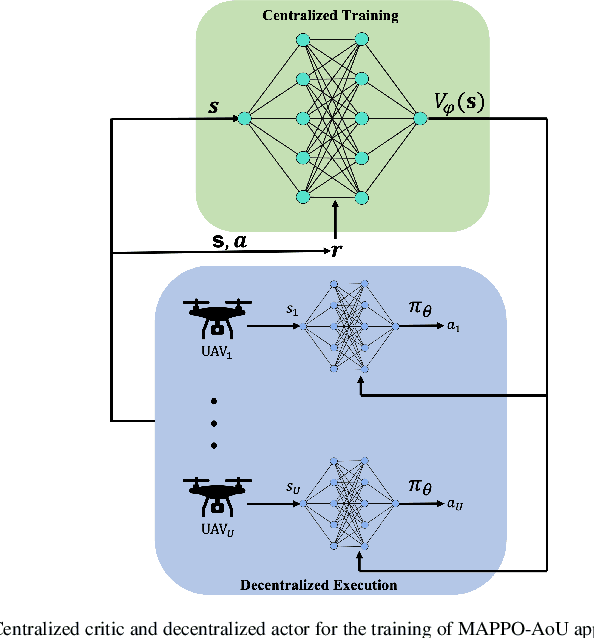
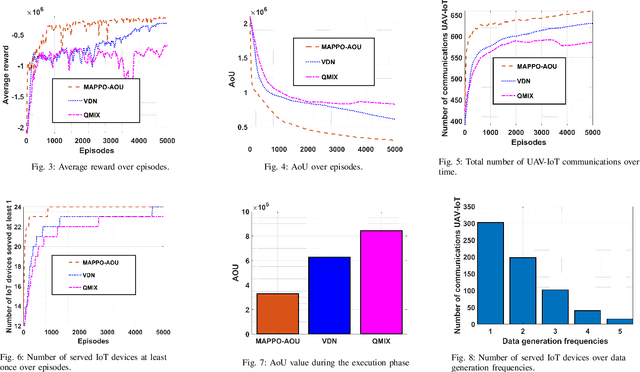
Unmanned aerial vehicles (UAVs) are seen as a promising technology to perform a wide range of tasks in wireless communication networks. In this work, we consider the deployment of a group of UAVs to collect the data generated by IoT devices. Specifically, we focus on the case where the collected data is time-sensitive, and it is critical to maintain its timeliness. Our objective is to optimally design the UAVs' trajectories and the subsets of visited IoT devices such as the global Age-of-Updates (AoU) is minimized. To this end, we formulate the studied problem as a mixed-integer nonlinear programming (MINLP) under time and quality of service constraints. To efficiently solve the resulting optimization problem, we investigate the cooperative Multi-Agent Reinforcement Learning (MARL) framework and propose an RL approach based on the popular on-policy Reinforcement Learning (RL) algorithm: Policy Proximal Optimization (PPO). Our approach leverages the centralized training decentralized execution (CTDE) framework where the UAVs learn their optimal policies while training a centralized value function. Our simulation results show that the proposed MAPPO approach reduces the global AoU by at least a factor of 1/2 compared to conventional off-policy reinforcement learning approaches.
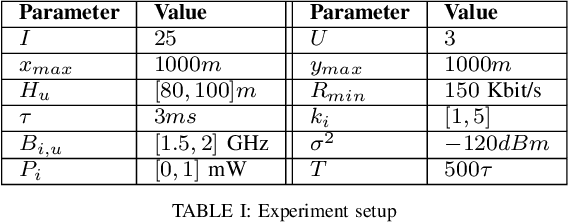
Client Selection in Federated Learning based on Gradients Importance
Nov 19, 2021
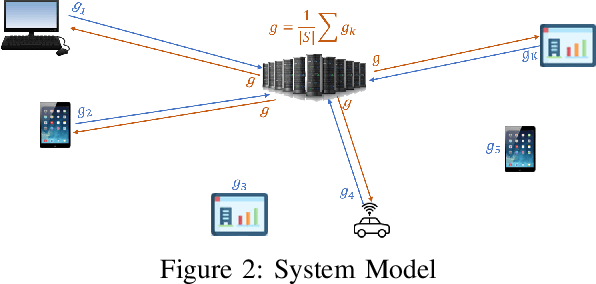

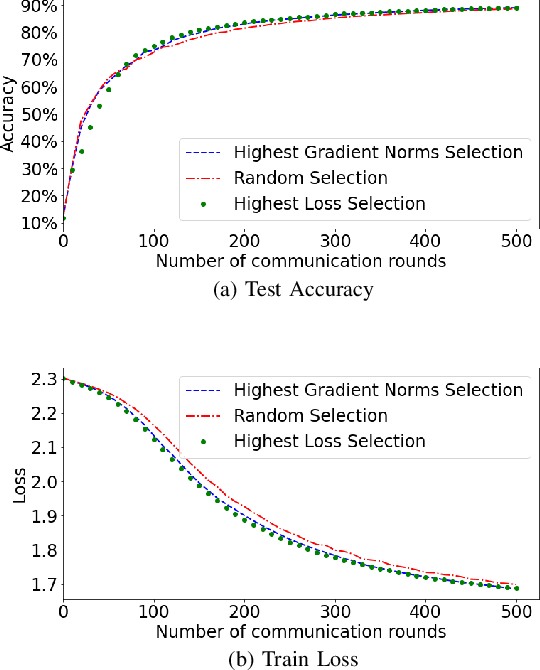
Federated learning (FL) enables multiple devices to collaboratively learn a global model without sharing their personal data. In real-world applications, the different parties are likely to have heterogeneous data distribution and limited communication bandwidth. In this paper, we are interested in improving the communication efficiency of FL systems. We investigate and design a device selection strategy based on the importance of the gradient norms. In particular, our approach consists of selecting devices with the highest norms of gradient values at each communication round. We study the convergence and the performance of such a selection technique and compare it to existing ones. We perform several experiments with non-iid set-up. The results show the convergence of our method with a considerable increase of test accuracy comparing to the random selection.