 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-Aware UAV Command and Control for Efficient IoT Data Collection
Apr 09, 2026Unmanned Aerial Vehicles (UAVs) have emerged as a key enabler technology for data collection from Internet of Things (IoT) devices. However, effective data collection is challenged by resource constraints and the need for real-time decision-making. In this work, we propose a novel framework that integrates semantic communication with UAV command-and-control (C&C) to enable efficient image data collection from IoT devices. Each device uses Deep Joint Source-Channel Coding (DeepJSCC) to generate a compact semantic latent representation of its image to enable image reconstruction even under partial transmission. A base station (BS) controls the UAV's trajectory by transmitting acceleration commands. The objective is to maximize the average quality of reconstructed images by maintaining proximity to each device for a sufficient duration within a fixed time horizon. To address the challenging trade-off and account for delayed C&C signals, we model the problem as a Markov Decision Process and propose a Double Deep Q-Learning (DDQN)-based adaptive flight policy. Simulation results show that our approach outperforms baseline methods such as greedy and traveling salesman algorithms, in both device coverage and semantic reconstruction quality.
Orientation Matters: Learning Radiation Patterns of Multi-Rotor UAVs In-Flight to Enhance Communication Availability Modeling
Apr 03, 2026The paper presents an approach for learning antenna Radiation Patterns (RPs) of a pair of heterogeneous quadrotor Uncrewed Aerial Vehicles (UAVs) by calibration flight data. RPs are modeled either as a Spherical Harmonics series or as a weighted average over inducing samples. Linear regression of polynomial coefficients simultaneously decouples the two independent UAVs' RPs. A joint calibration trajectory exploits available flight time in an obstacle-free anechoic altitude. Evaluation on a real-world dataset demonstrates the feasibility of learning both radiation patterns, achieving 3.6 dB RMS error, the measurement noise level. The proposed RP learning and decoupling can be exploited in rapid recalibration upon payload changes, thereby enabling precise autonomous path planning and swarm control in real-world applications where setup changes are expected.
Communications-Aware NMPC for Multi-Rotor Aerial Relay Networks Under Jamming Interference
Mar 30, 2026Multi-Rotor Aerial Vehicles (MRAVs) are increasingly used in communication-dependent missions where connectivity loss directly compromises task execution. Existing anti-jamming strategies often decouple motion from communication, overlooking that link quality depends on vehicle attitude and antenna orientation. In coplanar platforms, "tilt-to-translate" maneuvers can inadvertently align antenna nulls with communication partners, causing severe degradation under interference. This paper presents a modular communications-aware control framework that combines a high-level max-min trajectory generator with an actuator-level Nonlinear Model Predictive Controller (NMPC). The trajectory layer optimizes the weakest link under jamming, while the NMPC enforces vehicle dynamics, actuator limits, and antenna-alignment constraints. Antenna directionality is handled geometrically, avoiding explicit radiation-pattern parametrization. The method is evaluated in a relay scenario with an active jammer and compared across coplanar and tilted-propeller architectures. Results show a near two-order-of-magnitude increase in minimum end-to-end capacity, markedly reducing outage events, with moderate average-capacity gains. Tilted platforms preserve feasibility and link quality, whereas coplanar vehicles show recurrent degradation. These findings indicate that full actuation is a key enabler of reliable communications-aware operation under adversarial directional constraints.
Robust Planning and Control of Omnidirectional MRAVs for Aerial Communications in Wireless Networks
Apr 21, 2025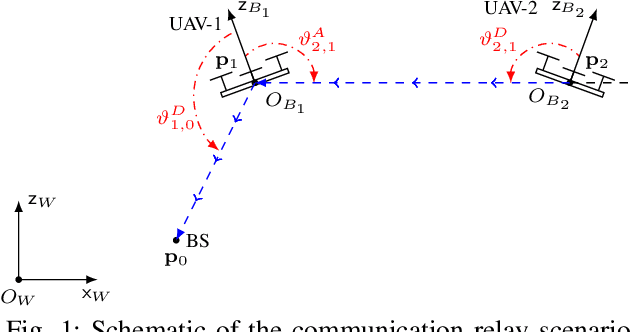
A new class of Multi-Rotor Aerial Vehicles (MRAVs), known as omnidirectional MRAVs (o-MRAVs), has gained attention for their ability to independently control 3D position and orientation. This capability enhances robust planning and control in aerial communication networks, enabling more adaptive trajectory planning and precise antenna alignment without additional mechanical components. These features are particularly valuable in uncertain environments, where disturbances such as wind and interference affect communication stability. This paper examines o-MRAVs in the context of robust aerial network planning, comparing them with the more common under-actuated MRAVs (u-MRAVs). Key applications, including physical layer security, optical communications, and network densification, are highlighted, demonstrating the potential of o-MRAVs to improve reliability and efficiency in dynamic communication scenarios.
Towards Agile Swarming in Real World: Onboard Relative Localization with Fast Tracking of Active Blinking Markers
Feb 03, 2025A novel onboard tracking approach enabling vision-based relative localization and communication using Active blinking Marker Tracking (AMT) is introduced in this article. Active blinking markers on multi-robot team members improve the robustness of relative localization for aerial vehicles in tightly coupled swarms during real-world deployments, while also serving as a resilient communication channel. Traditional tracking algorithms struggle to track fast moving blinking markers due to their intermittent appearance in the camera frames. AMT addresses this by using weighted polynomial regression to predict the future appearance of active blinking markers while accounting for uncertainty in the prediction. In outdoor experiments, the AMT approach outperformed state-of-the-art methods in tracking density, accuracy, and complexity. The experimental validation of this novel tracking approach for relative localization involved testing motion patterns motivated by our research on agile multi-robot deployment.
Reshaping UAV-Enabled Communications with Omnidirectional Multi-Rotor Aerial Vehicles
Nov 04, 2024



A new class of Multi-Rotor Aerial Vehicles (MRAVs), known as omnidirectional MRAVs (o-MRAVs), has attracted significant interest in the robotics community. These MRAVs have the unique capability of independently controlling their 3D position and 3D orientation. In the context of aerial communication networks, this translates into the ability to control the position and orientation of the antenna mounted on the MRAV without any additional devices tasked for antenna orientation. This additional Degrees of Freedom (DoF) adds a new dimension to aerial communication systems, creating various research opportunities in communications-aware trajectory planning and positioning. This paper presents this new class of MRAVs and discusses use cases in areas such as physical layer security and optical communications. Furthermore, the benefits of these MRAVs are illustrated with realistic simulation scenarios. Finally, new research problems and opportunities introduced by this advanced robotics technology are discussed.
Harnessing the Potential of Omnidirectional Multi-Rotor Aerial Vehicles in Cooperative Jamming Against Eavesdropping
Aug 19, 2024



Recent research in communications-aware robotics has been propelled by advancements in 5G and emerging 6G technologies. This field now includes the integration of Multi-Rotor Aerial Vehicles (MRAVs) into cellular networks, with a specific focus on under-actuated MRAVs. These vehicles face challenges in independently controlling position and orientation due to their limited control inputs, which adversely affects communication metrics such as Signal-to-Noise Ratio. In response, a newer class of omnidirectional MRAVs has been developed, which can control both position and orientation simultaneously by tilting their propellers. However, exploiting this capability fully requires sophisticated motion planning techniques. This paper presents a novel application of omnidirectional MRAVs designed to enhance communication security and thwart eavesdropping. It proposes a strategy where one MRAV functions as an aerial Base Station, while another acts as a friendly jammer to secure communications. This study is the first to apply such a strategy to MRAVs in scenarios involving eavesdroppers.
PACNav: Enhancing Collective Navigation for UAV Swarms in Communication-Challenged Environments
Apr 20, 2024This article presents Persistence Administered Collective Navigation (PACNav) as an approach for achieving decentralized collective navigation of Unmanned Aerial Vehicle (UAV) swarms. The technique is inspired by the flocking and collective navigation behavior observed in natural swarms, such as cattle herds, bird flocks, and even large groups of humans. PACNav relies solely on local observations of relative positions of UAVs, making it suitable for large swarms deprived of communication capabilities and external localization systems. We introduce the novel concepts of path persistence and path similarity, which allow each swarm member to analyze the motion of others. PACNav is grounded on two main principles: (1) UAVs with little variation in motion direction exhibit high path persistence and are considered reliable leaders by other UAVs; (2) groups of UAVs that move in a similar direction demonstrate high path similarity, and such groups are assumed to contain a reliable leader. The proposed approach also incorporates a reactive collision avoidance mechanism to prevent collisions with swarm members and environmental obstacles. The method is validated through simulated and real-world experiments conducted in a natural forest.
Omnidirectional Multi-Rotor Aerial Vehicle Pose Optimization: A Novel Approach to Physical Layer Security
Jan 05, 2024

The integration of Multi-Rotor Aerial Vehicles (MRAVs) into 5G and 6G networks enhances coverage, connectivity, and congestion management. This fosters communication-aware robotics, exploring the interplay between robotics and communications, but also makes the MRAVs susceptible to malicious attacks, such as jamming. One traditional approach to counter these attacks is the use of beamforming on the MRAVs to apply physical layer security techniques. In this paper, we explore pose optimization as an alternative approach to countering jamming attacks on MRAVs. This technique is intended for omnidirectional MRAVs, which are drones capable of independently controlling both their position and orientation, as opposed to the more common underactuated MRAVs whose orientation cannot be controlled independently of their position. In this paper, we consider an omnidirectional MRAV serving as a Base Station (BS) for legitimate ground nodes, under attack by a malicious jammer. We optimize the MRAV pose (i.e., position and orientation) to maximize the minimum Signal-to-Interference-plus-Noise Ratio (SINR) over all legitimate nodes.
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.