 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRADRON: Cooperative Localization of Ionizing Radiation Sources by MAVs with Compton Cameras
Oct 29, 2025We present a novel approach to localizing radioactive material by cooperating Micro Aerial Vehicles (MAVs). Our approach utilizes a state-of-the-art single-detector Compton camera as a highly sensitive, yet miniature detector of ionizing radiation. The detector's exceptionally low weight (40 g) opens up new possibilities of radiation detection by a team of cooperating agile MAVs. We propose a new fundamental concept of fusing the Compton camera measurements to estimate the position of the radiation source in real time even from extremely sparse measurements. The data readout and processing are performed directly onboard and the results are used in a dynamic feedback to drive the motion of the vehicles. The MAVs are stabilized in a tightly cooperating swarm to maximize the information gained by the Compton cameras, rapidly locate the radiation source, and even track a moving radiation source.
CAT-ORA: Collision-Aware Time-Optimal Formation Reshaping for Efficient Robot Coordination in 3D Environments
Nov 30, 2024In this paper, we introduce an algorithm designed to address the problem of time-optimal formation reshaping in three-dimensional environments while preventing collisions between agents. The utility of the proposed approach is particularly evident in mobile robotics, where agents benefit from being organized and navigated in formation for a variety of real-world applications requiring frequent alterations in formation shape for efficient navigation or task completion. Given the constrained operational time inherent to battery-powered mobile robots, the time needed to complete the formation reshaping process is crucial for their efficient operation, especially in case of multi-rotor Unmanned Aerial Vehicles (UAVs). The proposed Collision-Aware Time-Optimal formation Reshaping Algorithm (CAT-ORA) builds upon the Hungarian algorithm for the solution of the robot-to-goal assignment implementing the inter-agent collision avoidance through direct constraints on mutually exclusive robot-goal pairs combined with a trajectory generation approach minimizing the duration of the reshaping process. Theoretical validations confirm the optimality of CAT-ORA, with its efficacy further showcased through simulations, and a real-world outdoor experiment involving 19 UAVs. Thorough numerical analysis shows the potential of CAT-ORA to decrease the time required to perform complex formation reshaping tasks by up to 49%, and 12% on average compared to commonly used methods in randomly generated scenarios.
Fast Swarming of UAVs in GNSS-denied Feature-poor Environments without Explicit Communication
Apr 29, 2024



A decentralized swarm approach for the fast cooperative flight of Unmanned Aerial Vehicles (UAVs) in feature-poor environments without any external localization and communication is introduced in this paper. A novel model of a UAV neighborhood is proposed to achieve robust onboard mutual perception and flocking state feedback control, which is designed to decrease the inter-agent oscillations common in standard reactive swarm models employed in fast collective motion. The novel swarming methodology is supplemented with an enhanced Multi-Robot State Estimation (MRSE) strategy to increase the reliability of the purely onboard localization, which may be unreliable in real environments. Although MRSE and the neighborhood model may rely on information exchange between agents, we introduce a communication-less version of the swarming framework based on estimating communicated states to decrease dependence on the often unreliable communication networks of large swarms. The proposed solution has been verified by a set of complex real-world experiments to demonstrate its overall capability in different conditions, including a UAV interception-motivated task with a group velocity reaching the physical limits of the individual hardware platforms.
PACNav: Enhancing Collective Navigation for UAV Swarms in Communication-Challenged Environments
Apr 20, 2024This article presents Persistence Administered Collective Navigation (PACNav) as an approach for achieving decentralized collective navigation of Unmanned Aerial Vehicle (UAV) swarms. The technique is inspired by the flocking and collective navigation behavior observed in natural swarms, such as cattle herds, bird flocks, and even large groups of humans. PACNav relies solely on local observations of relative positions of UAVs, making it suitable for large swarms deprived of communication capabilities and external localization systems. We introduce the novel concepts of path persistence and path similarity, which allow each swarm member to analyze the motion of others. PACNav is grounded on two main principles: (1) UAVs with little variation in motion direction exhibit high path persistence and are considered reliable leaders by other UAVs; (2) groups of UAVs that move in a similar direction demonstrate high path similarity, and such groups are assumed to contain a reliable leader. The proposed approach also incorporates a reactive collision avoidance mechanism to prevent collisions with swarm members and environmental obstacles. The method is validated through simulated and real-world experiments conducted in a natural forest.
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.
Bio-Inspired Compact Swarms of Unmanned Aerial Vehicles without Communication and External Localization
Mar 06, 2023This article presents a unique framework for deploying decentralized and infrastructure-independent swarms of homogeneous aerial vehicles in the real world without explicit communication. This is a requirement in swarm research, which anticipates that global knowledge and communication will not scale well with the number of robots. The system architecture proposed in this article employs the UVDAR technique to directly perceive the local neighborhood for direct mutual localization of swarm members. The technique allows for decentralization and high scalability of swarm systems, such as can be observed in fish schools, bird flocks, or cattle herds. The bio-inspired swarming model that has been developed is suited for real-world deployment of large particle groups in outdoor and indoor environments with obstacles. The collective behavior of the model emerges from a set of local rules based on direct observation of the neighborhood using onboard sensors only. The model is scalable, requires only local perception of agents and the environment, and requires no communication among the agents. Apart from simulated scenarios, the performance and usability of the entire framework is analyzed in several real-world experiments with a fully-decentralized swarm of UAVs deployed in outdoor conditions. To the best of our knowledge, these experiments are the first deployment of decentralized bio-inspired compact swarms of UAVs without the use of a communication network or shared absolute localization. The entire system is available as open-source at https://github.com/ctu-mrs.
New Era in Cultural Heritage Preservation: Cooperative Aerial Autonomy
Mar 06, 2023



Digital documentation of large interiors of historical buildings is an exhausting task since most of the areas of interest are beyond typical human reach. We advocate the use of autonomous teams of multi-rotor Unmanned Aerial Vehicles (UAVs) to speed up the documentation process by several orders of magnitude while allowing for a repeatable, accurate, and condition-independent solution capable of precise collision-free operation at great heights. The proposed multi-robot approach allows for performing tasks requiring dynamic scene illumination in large-scale real-world scenarios, a process previously applicable only in small-scale laboratory-like conditions. Extensive experimental analyses range from single-UAV imaging to specialized lighting techniques requiring accurate coordination of multiple UAVs. The system's robustness is demonstrated in more than two hundred autonomous flights in fifteen historical monuments requiring superior safety while lacking access to external localization. This unique experimental campaign, cooperated with restorers and conservators, brought numerous lessons transferable to other safety-critical robotic missions in documentation and inspection tasks.
* Published as Early Access on February 28, 2023. Supported by multimedia available at http://mrs.felk.cvut.cz/ram2022dronument
Large-Scale Exploration of Cave Environments by Unmanned Aerial Vehicles
Mar 06, 2023
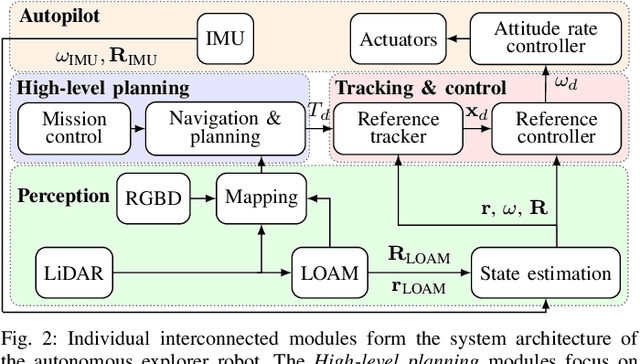

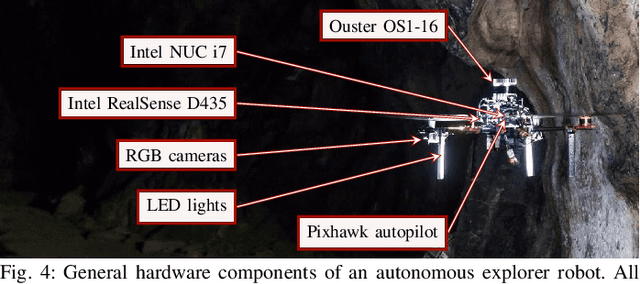
This paper presents a self-contained system for the robust utilization of aerial robots in the autonomous exploration of cave environments to help human explorers, first responders, and speleologists. The proposed system is generally applicable to an arbitrary exploration task within an unknown and unstructured subterranean environment and interconnects crucial robotic subsystems to provide full autonomy of the robots. Such subsystems primarily include mapping, path and trajectory planning, localization, control, and decision making. Due to the diversity, complexity, and structural uncertainty of natural cave environments, the proposed system allows for the possible use of any arbitrary exploration strategy for a single robot, as well as for a cooperating team. A multi-robot cooperation strategy that maximizes the limited flight time of each aerial robot is proposed for exploration and search & rescue scenarios where the homing of all deployed robots back to an initial location is not required The entire system is validated in a comprehensive experimental analysis comprising of hours of flight time in a real-world cave environment, as well as by hundreds of hours within a state-of-the-art virtual testbed that was developed for the DARPA Subterranean Challenge robotic competition. Among others, experimental results include multiple real-world exploration flights traveling over 470 meters on a single battery in a demanding unknown cave environment.
Power Line Inspection Tasks with Multi-Aerial Robot Systems via Signal Temporal Logic Specifications
Feb 09, 2023



A framework for computing feasible and constrained trajectories for a fleet of quad-rotors leveraging on Signal Temporal Logic (STL) specifications for power line inspection tasks is proposed in this paper. The planner allows the formulation of complex missions that avoid obstacles and maintain a safe distance between drones while performing the planned mission. An optimization problem is set to generate optimal strategies that satisfy these specifications and also take vehicle constraints into account. Further, an event-triggered replanner is proposed to reply to unforeseen events and external disturbances. An energy minimization term is also considered to implicitly save quad-rotors battery life while carrying out the mission. Numerical simulations in MATLAB and experimental results show the validity and the effectiveness of the proposed approach, and demonstrate its applicability in real-world scenarios.
* 8 pages, 12 figures, journal paper
PACNav: A collective navigation approach for UAV swarms deprived of communication and external localization
Feb 09, 2023This article proposes Persistence Administered Collective Navigation (PACNav) as an approach for achieving decentralized collective navigation of Unmanned Aerial Vehicle (UAV) swarms. The technique is based on the flocking and collective navigation behavior observed in natural swarms, such as cattle herds, bird flocks, and even large groups of humans. As global and concurrent information of all swarm members is not available in natural swarms, these systems use local observations to achieve the desired behavior. Similarly, PACNav relies only on local observations of relative positions of UAVs, making it suitable for large swarms deprived of communication capabilities and external localization systems. We introduce the novel concepts of path persistence and path similarity that allow each swarm member to analyze the motion of other members in order to determine its own future motion. PACNav is based on two main principles: (1) UAVs with little variation in motion direction have high path persistence, and are considered by other UAVs to be reliable leaders; (2) groups of UAVs that move in a similar direction have high path similarity, and such groups are assumed to contain a reliable leader. The proposed approach also embeds a reactive collision avoidance mechanism to avoid collisions with swarm members and environmental obstacles. This collision avoidance ensures safety while reducing deviations from the assigned path. Along with several simulated experiments, we present a real-world experiment in a natural forest, showcasing the validity and effectiveness of the proposed collective navigation approach in challenging environments. The source code is released as open-source, making it possible to replicate the obtained results and facilitate the continuation of research by the community.
* 17 pages, 16 figures, journal paper