 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRVC-NMPC: Nonlinear Model Predictive Control with Reciprocal Velocity Constraints for Mutual Collision Avoidance in Agile UAV Flight
Dec 09, 2025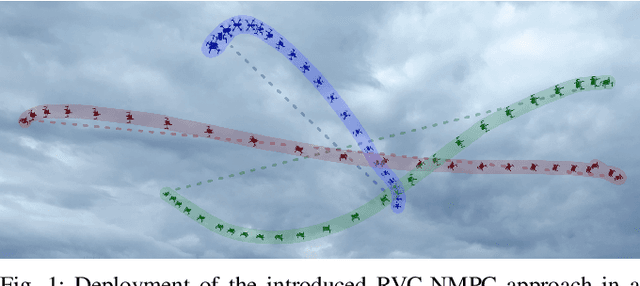



This paper presents an approach to mutual collision avoidance based on Nonlinear Model Predictive Control (NMPC) with time-dependent Reciprocal Velocity Constraints (RVCs). Unlike most existing methods, the proposed approach relies solely on observable information about other robots, eliminating the necessity of excessive communication use. The computationally efficient algorithm for computing RVCs, together with the direct integration of these constraints into NMPC problem formulation on a controller level, allows the whole pipeline to run at 100 Hz. This high processing rate, combined with modeled nonlinear dynamics of the controlled Uncrewed Aerial Vehicles (UAVs), is a key feature that facilitates the use of the proposed approach for an agile UAV flight. The proposed approach was evaluated through extensive simulations emulating real-world conditions in scenarios involving up to 10 UAVs and velocities of up to 25 m/s, and in real-world experiments with accelerations up to 30 m/s$^2$. Comparison with state of the art shows 31% improvement in terms of flight time reduction in challenging scenarios, while maintaining a collision-free navigation in all trials.
CAT-ORA: Collision-Aware Time-Optimal Formation Reshaping for Efficient Robot Coordination in 3D Environments
Nov 30, 2024In this paper, we introduce an algorithm designed to address the problem of time-optimal formation reshaping in three-dimensional environments while preventing collisions between agents. The utility of the proposed approach is particularly evident in mobile robotics, where agents benefit from being organized and navigated in formation for a variety of real-world applications requiring frequent alterations in formation shape for efficient navigation or task completion. Given the constrained operational time inherent to battery-powered mobile robots, the time needed to complete the formation reshaping process is crucial for their efficient operation, especially in case of multi-rotor Unmanned Aerial Vehicles (UAVs). The proposed Collision-Aware Time-Optimal formation Reshaping Algorithm (CAT-ORA) builds upon the Hungarian algorithm for the solution of the robot-to-goal assignment implementing the inter-agent collision avoidance through direct constraints on mutually exclusive robot-goal pairs combined with a trajectory generation approach minimizing the duration of the reshaping process. Theoretical validations confirm the optimality of CAT-ORA, with its efficacy further showcased through simulations, and a real-world outdoor experiment involving 19 UAVs. Thorough numerical analysis shows the potential of CAT-ORA to decrease the time required to perform complex formation reshaping tasks by up to 49%, and 12% on average compared to commonly used methods in randomly generated scenarios.
Real-time Planning of Minimum-time Trajectories for Agile UAV Flight
Sep 24, 2024We address the challenge of real-time planning of minimum-time trajectories over multiple waypoints, onboard multirotor UAVs. Previous works demonstrated that achieving a truly time-optimal trajectory is computationally too demanding to enable frequent replanning during agile flight, especially on less powerful flight computers. Our approach overcomes this stumbling block by utilizing a point-mass model with a novel iterative thrust decomposition algorithm, enabling the UAV to use all of its collective thrust, something previous point-mass approaches could not achieve. The approach enables gravity and drag modeling integration, significantly reducing tracking errors in high-speed trajectories, which is proven through an ablation study. When combined with a new multi-waypoint optimization algorithm, which uses a gradient-based method to converge to optimal velocities in waypoints, the proposed method generates minimum-time multi-waypoint trajectories within milliseconds. The proposed approach, which we provide as open-source package, is validated both in simulation and in real-world, using Nonlinear Model Predictive Control. With accelerations of up to 3.5g and speeds over 100 km/h, trajectories generated by the proposed method yield similar or even smaller tracking errors than the trajectories generated for a full multirotor model.
Model Predictive Path Integral Control for Agile Unmanned Aerial Vehicles
Jul 13, 2024This paper introduces a control architecture for real-time and onboard control of Unmanned Aerial Vehicles (UAVs) in environments with obstacles using the Model Predictive Path Integral (MPPI) methodology. MPPI allows the use of the full nonlinear model of UAV dynamics and a more general cost function at the cost of a high computational demand. To run the controller in real-time, the sampling-based optimization is performed in parallel on a graphics processing unit onboard the UAV. We propose an approach to the simulation of the nonlinear system which respects low-level constraints, while also able to dynamically handle obstacle avoidance, and prove that our methods are able to run in real-time without the need for external computers. The MPPI controller is compared to MPC and SE(3) controllers on the reference tracking task, showing a comparable performance. We demonstrate the viability of the proposed method in multiple simulation and real-world experiments, tracking a reference at up to 44 km/h and acceleration close to 20 m/s^2, while still being able to avoid obstacles. To the best of our knowledge, this is the first method to demonstrate an MPPI-based approach in real flight.
Energy-aware Multi-UAV Coverage Mission Planning with Optimal Speed of Flight
Feb 16, 2024This paper tackles the problem of planning minimum-energy coverage paths for multiple UAVs. The addressed Multi-UAV Coverage Path Planning (mCPP) is a crucial problem for many UAV applications such as inspection and aerial survey. However, the typical path-length objective of existing approaches does not directly minimize the energy consumption, nor allows for constraining energy of individual paths by the battery capacity. To this end, we propose a novel mCPP method that uses the optimal flight speed for minimizing energy consumption per traveled distance and a simple yet precise energy consumption estimation algorithm that is utilized during the mCPP planning phase. The method decomposes a given area with boustrophedon decomposition and represents the mCPP as an instance of Multiple Set Traveling Salesman Problem with a minimum energy objective and energy consumption constraint. The proposed method is shown to outperform state-of-the-art methods in terms of computational time and energy efficiency of produced paths. The experimental results show that the accuracy of the energy consumption estimation is on average 97% compared to real flight consumption. The feasibility of the proposed method was verified in a real-world coverage experiment with two UAVs.
* in IEEE Robotics and Automation Letters
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Jul 12, 2023Autonomous, agile quadrotor flight raises fundamental challenges for robotics research in terms of perception, planning, learning, and control. A versatile and standardized platform is needed to accelerate research and let practitioners focus on the core problems. To this end, we present Agilicious, a co-designed hardware and software framework tailored to autonomous, agile quadrotor flight. It is completely open-source and open-hardware and supports both model-based and neural-network--based controllers. Also, it provides high thrust-to-weight and torque-to-inertia ratios for agility, onboard vision sensors, GPU-accelerated compute hardware for real-time perception and neural-network inference, a real-time flight controller, and a versatile software stack. In contrast to existing frameworks, Agilicious offers a unique combination of flexible software stack and high-performance hardware. We compare Agilicious with prior works and demonstrate it on different agile tasks, using both model-based and neural-network--based controllers. Our demonstrators include trajectory tracking at up to 5g and 70 km/h in a motion-capture system, and vision-based acrobatic flight and obstacle avoidance in both structured and unstructured environments using solely onboard perception. Finally, we demonstrate its use for hardware-in-the-loop simulation in virtual-reality environments. Thanks to its versatility, we believe that Agilicious supports the next generation of scientific and industrial quadrotor research.
* 14 pages, 5 figures, 2 tables
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.
CTopPRM: Clustering Topological PRM for Planning Multiple Distinct Paths in 3D Environments
May 23, 2023



In this paper, we propose a new method called Clustering Topological PRM (CTopPRM) for finding multiple homotopically distinct paths in 3D cluttered environments. Finding such distinct paths, e.g., going around an obstacle from a different side, is useful in many applications. Among others, using multiple distinct paths is necessary for optimization-based trajectory planners where found trajectories are restricted to only a single homotopy class of a given path. Distinct paths can also be used to guide sampling-based motion planning and thus increase the effectiveness of planning in environments with narrow passages. Graph-based representation called roadmap is a common representation for path planning and also for finding multiple distinct paths. However, challenging environments with multiple narrow passages require a densely sampled roadmap to capture the connectivity of the environment. Searching such a dense roadmap for multiple paths is computationally too expensive. Therefore, the majority of existing methods construct only a sparse roadmap which, however, struggles to find all distinct paths in challenging environments. To this end, we propose the CTopPRM which creates a sparse graph by clustering an initially sampled dense roadmap. Such a reduced roadmap allows fast identification of homotopically distinct paths captured in the dense roadmap. We show, that compared to the existing methods the CTopPRM improves the probability of finding all distinct paths by almost 20% in tested environments, during same run-time. The source code of our method is released as an open-source package.
Power Line Inspection Tasks with Multi-Aerial Robot Systems via Signal Temporal Logic Specifications
Feb 09, 2023



A framework for computing feasible and constrained trajectories for a fleet of quad-rotors leveraging on Signal Temporal Logic (STL) specifications for power line inspection tasks is proposed in this paper. The planner allows the formulation of complex missions that avoid obstacles and maintain a safe distance between drones while performing the planned mission. An optimization problem is set to generate optimal strategies that satisfy these specifications and also take vehicle constraints into account. Further, an event-triggered replanner is proposed to reply to unforeseen events and external disturbances. An energy minimization term is also considered to implicitly save quad-rotors battery life while carrying out the mission. Numerical simulations in MATLAB and experimental results show the validity and the effectiveness of the proposed approach, and demonstrate its applicability in real-world scenarios.
* 8 pages, 12 figures, journal paper
MRS Modular UAV Hardware Platforms for Supporting Research in Real-World Outdoor and Indoor Environments
Feb 09, 2023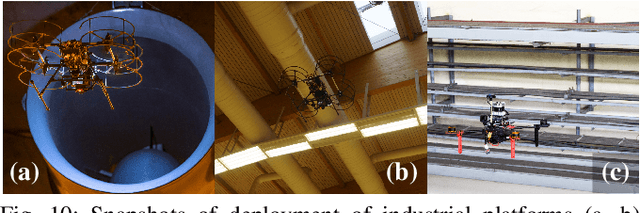
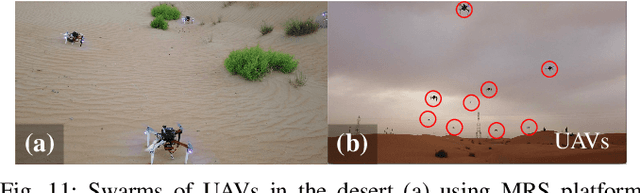
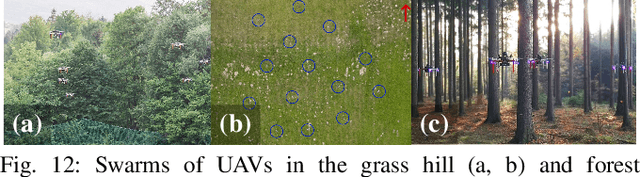
This paper presents a family of autonomous Unmanned Aerial Vehicles (UAVs) platforms designed for a diverse range of indoor and outdoor applications. The proposed UAV design is highly modular in terms of used actuators, sensor configurations, and even UAV frames. This allows to achieve, with minimal effort, a proper experimental setup for single, as well as, multi robot scenarios. Presented platforms are intended to facilitate the transition from simulations, and simplified laboratory experiments, into the deployment of aerial robots into uncertain and hard-to-model real-world conditions. We present mechanical designs, electric configurations, and dynamic models of the UAVs, followed by numerous recommendations and technical details required for building such a fully autonomous UAV system for experimental verification of scientific achievements. To show strength and high variability of the proposed system, we present results of tens of completely different real-robot experiments in various environments using distinct actuator and sensory configurations.
* 10 pages, 17 figures, conference