 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Walk and Fly with Adversarial Motion Priors
Sep 22, 2023



Robot multimodal locomotion encompasses the ability to transition between walking and flying, representing a significant challenge in robotics. This work presents an approach that enables automatic smooth transitions between legged and aerial locomotion. Leveraging the concept of Adversarial Motion Priors, our method allows the robot to imitate motion datasets and accomplish the desired task without the need for complex reward functions. The robot learns walking patterns from human-like gaits and aerial locomotion patterns from motions obtained using trajectory optimization. Through this process, the robot adapts the locomotion scheme based on environmental feedback using reinforcement learning, with the spontaneous emergence of mode-switching behavior. The results highlight the potential for achieving multimodal locomotion in aerial humanoid robotics through automatic control of walking and flying modes, paving the way for applications in diverse domains such as search and rescue, surveillance, and exploration missions. This research contributes to advancing the capabilities of aerial humanoid robots in terms of versatile locomotion in various environments.
Autonomous Drone Racing: A Survey
Jan 05, 2023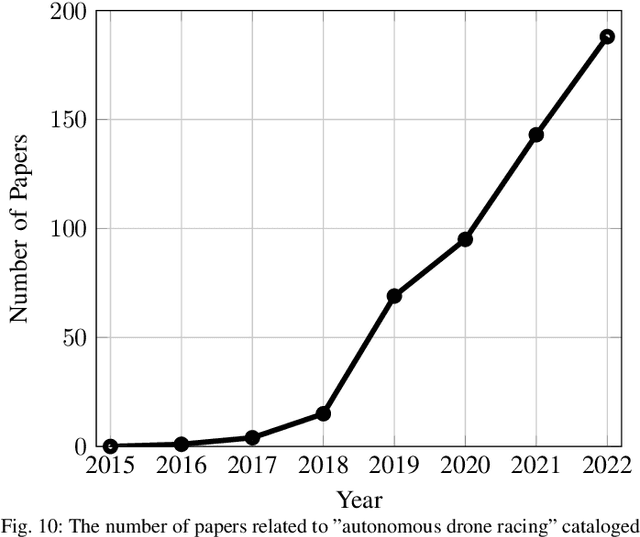
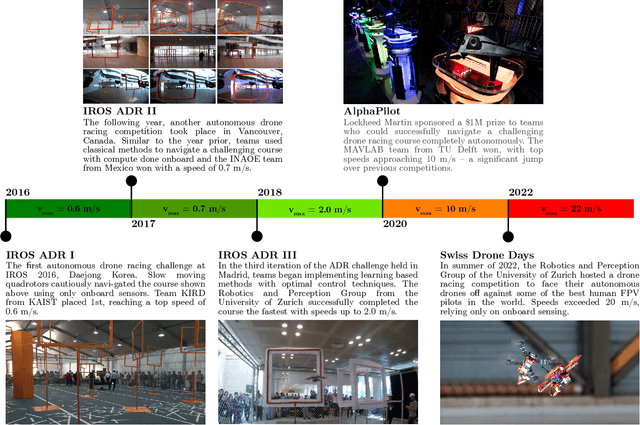

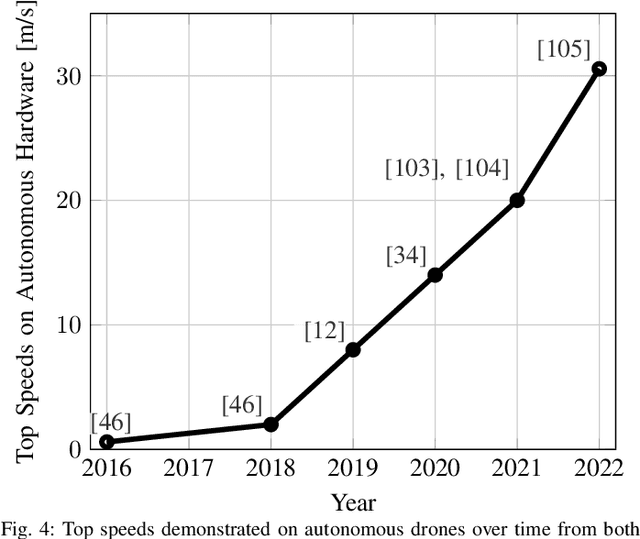
Over the last decade, the use of autonomous drone systems for surveying, search and rescue, or last-mile delivery has increased exponentially. With the rise of these applications comes the need for highly robust, safety-critical algorithms which can operate drones in complex and uncertain environments. Additionally, flying fast enables drones to cover more ground which in turn increases productivity and further strengthens their use case. One proxy for developing algorithms used in high-speed navigation is the task of autonomous drone racing, where researchers program drones to fly through a sequence of gates and avoid obstacles as quickly as possible using onboard sensors and limited computational power. Speeds and accelerations exceed over 80 kph and 4 g respectively, raising significant challenges across perception, planning, control, and state estimation. To achieve maximum performance, systems require real-time algorithms that are robust to motion blur, high dynamic range, model uncertainties, aerodynamic disturbances, and often unpredictable opponents. This survey covers the progression of autonomous drone racing across model-based and learning-based approaches. We provide an overview of the field, its evolution over the years, and conclude with the biggest challenges and open questions to be faced in the future.
Performance, Precision, and Payloads: Adaptive Nonlinear MPC for Quadrotors
Sep 09, 2021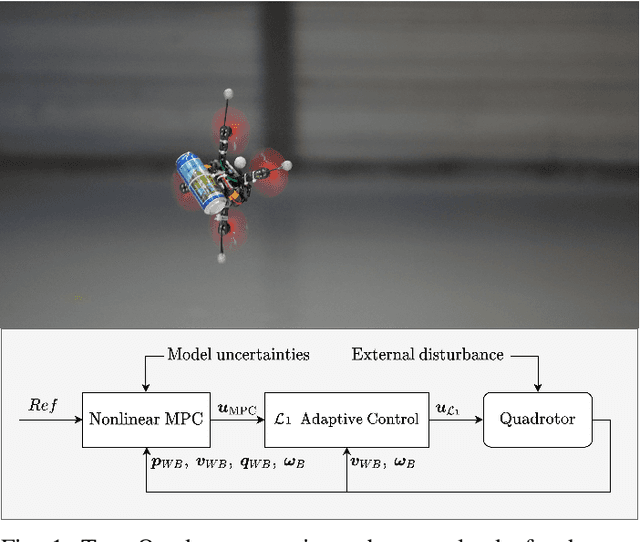
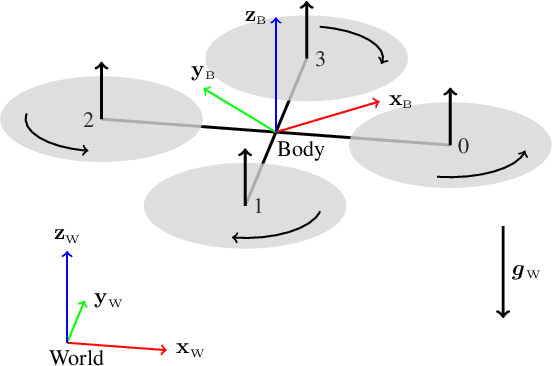
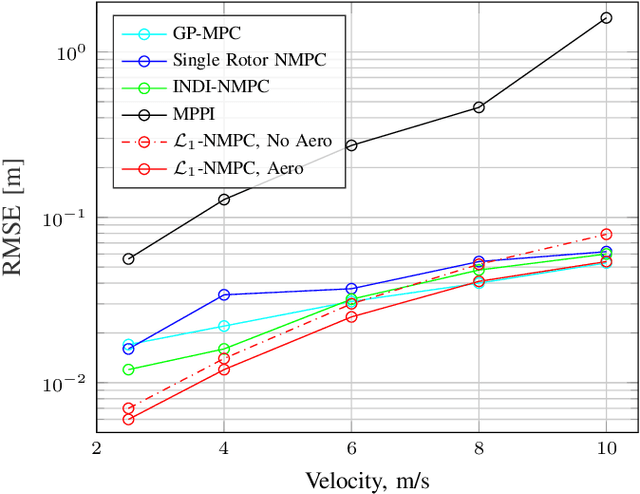
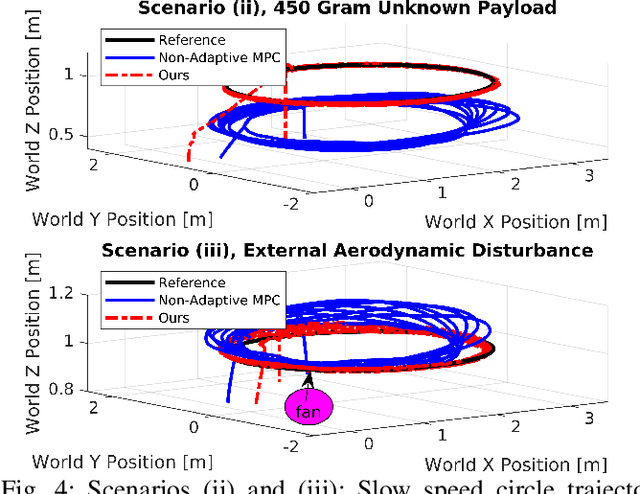
Agile quadrotor flight in challenging environments has the potential to revolutionize shipping, transportation, and search and rescue applications. Nonlinear model predictive control (NMPC) has recently shown promising results for agile quadrotor control, but relies on highly accurate models for maximum performance. Hence, model uncertainties in the form of unmodeled complex aerodynamic effects, varying payloads and parameter mismatch will degrade overall system performance. In this paper, we propose L1-NMPC, a novel hybrid adaptive NMPC to learn model uncertainties online and immediately compensate for them, drastically improving performance over the non-adaptive baseline with minimal computational overhead. Our proposed architecture generalizes to many different environments from which we evaluate wind, unknown payloads, and highly agile flight conditions. The proposed method demonstrates immense flexibility and robustness, with more than 90% tracking error reduction over non-adaptive NMPC under large unknown disturbances and without any gain tuning. In addition, the same controller with identical gains can accurately fly highly agile racing trajectories exhibiting top speeds of 70 km/h, offering tracking performance improvements of around 50% relative to the non-adaptive NMPC baseline. We will release our code fully open-sourced upon acceptance.