 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion-aware Event Suppression for Event Cameras
Feb 26, 2026In this work, we introduce the first framework for Motion-aware Event Suppression, which learns to filter events triggered by IMOs and ego-motion in real time. Our model jointly segments IMOs in the current event stream while predicting their future motion, enabling anticipatory suppression of dynamic events before they occur. Our lightweight architecture achieves 173 Hz inference on consumer-grade GPUs with less than 1 GB of memory usage, outperforming previous state-of-the-art methods on the challenging EVIMO benchmark by 67\% in segmentation accuracy while operating at a 53\% higher inference rate. Moreover, we demonstrate significant benefits for downstream applications: our method accelerates Vision Transformer inference by 83\% via token pruning and improves event-based visual odometry accuracy, reducing Absolute Trajectory Error (ATE) by 13\%.
Egocentric Event-Based Vision for Ping Pong Ball Trajectory Prediction
Jun 09, 2025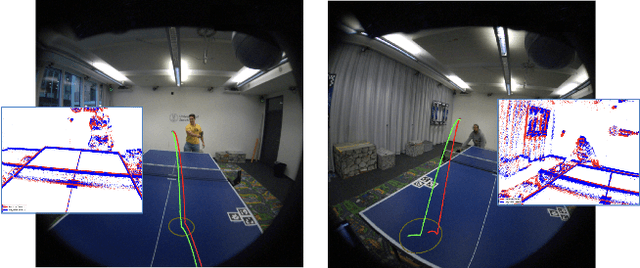
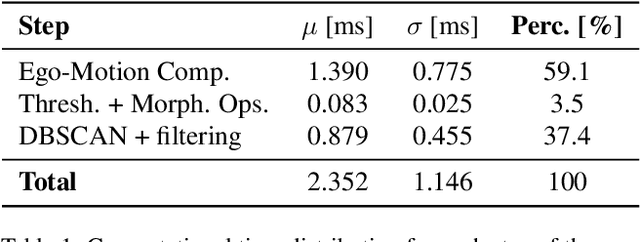

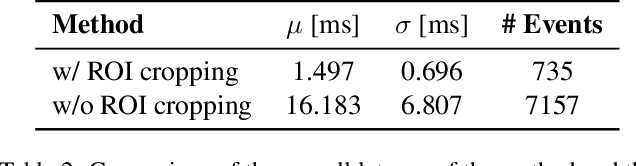
In this paper, we present a real-time egocentric trajectory prediction system for table tennis using event cameras. Unlike standard cameras, which suffer from high latency and motion blur at fast ball speeds, event cameras provide higher temporal resolution, allowing more frequent state updates, greater robustness to outliers, and accurate trajectory predictions using just a short time window after the opponent's impact. We collect a dataset of ping-pong game sequences, including 3D ground-truth trajectories of the ball, synchronized with sensor data from the Meta Project Aria glasses and event streams. Our system leverages foveated vision, using eye-gaze data from the glasses to process only events in the viewer's fovea. This biologically inspired approach improves ball detection performance and significantly reduces computational latency, as it efficiently allocates resources to the most perceptually relevant regions, achieving a reduction factor of 10.81 on the collected trajectories. Our detection pipeline has a worst-case total latency of 4.5 ms, including computation and perception - significantly lower than a frame-based 30 FPS system, which, in the worst case, takes 66 ms solely for perception. Finally, we fit a trajectory prediction model to the estimated states of the ball, enabling 3D trajectory forecasting in the future. To the best of our knowledge, this is the first approach to predict table tennis trajectories from an egocentric perspective using event cameras.
Reading in the Dark with Foveated Event Vision
Jun 07, 2025



Current smart glasses equipped with RGB cameras struggle to perceive the environment in low-light and high-speed motion scenarios due to motion blur and the limited dynamic range of frame cameras. Additionally, capturing dense images with a frame camera requires large bandwidth and power consumption, consequently draining the battery faster. These challenges are especially relevant for developing algorithms that can read text from images. In this work, we propose a novel event-based Optical Character Recognition (OCR) approach for smart glasses. By using the eye gaze of the user, we foveate the event stream to significantly reduce bandwidth by around 98% while exploiting the benefits of event cameras in high-dynamic and fast scenes. Our proposed method performs deep binary reconstruction trained on synthetic data and leverages multimodal LLMs for OCR, outperforming traditional OCR solutions. Our results demonstrate the ability to read text in low light environments where RGB cameras struggle while using up to 2400 times less bandwidth than a wearable RGB camera.
HDVIO2.0: Wind and Disturbance Estimation with Hybrid Dynamics VIO
Apr 01, 2025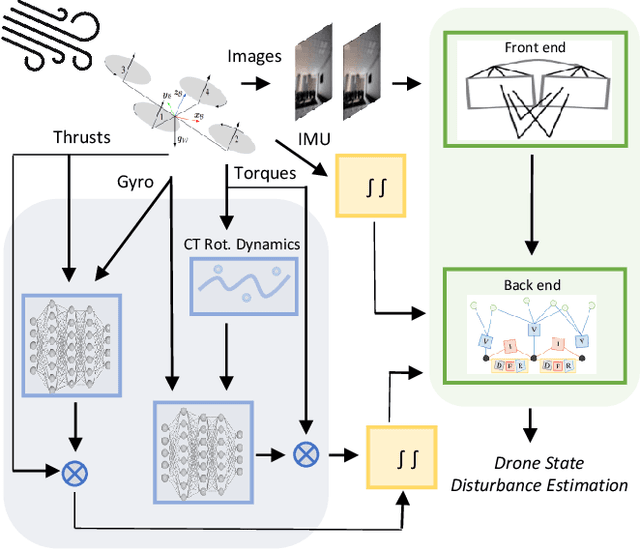
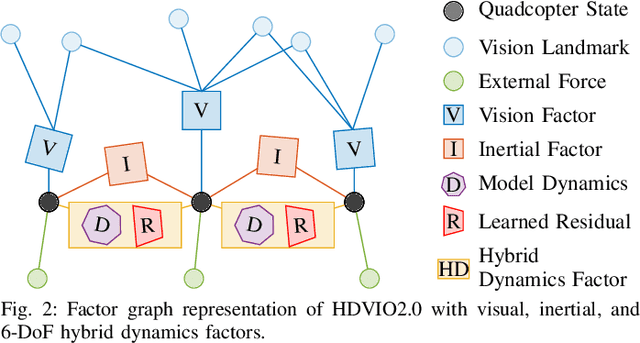
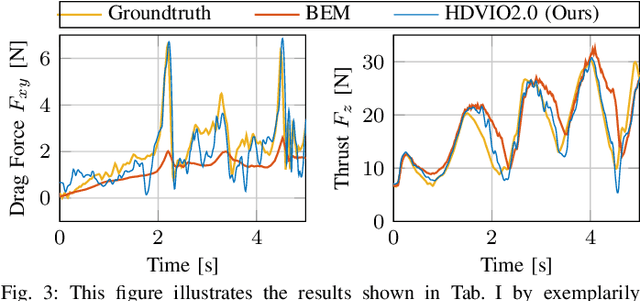

Visual-inertial odometry (VIO) is widely used for state estimation in autonomous micro aerial vehicles using onboard sensors. Current methods improve VIO by incorporating a model of the translational vehicle dynamics, yet their performance degrades when faced with low-accuracy vehicle models or continuous external disturbances, like wind. Additionally, incorporating rotational dynamics in these models is computationally intractable when they are deployed in online applications, e.g., in a closed-loop control system. We present HDVIO2.0, which models full 6-DoF, translational and rotational, vehicle dynamics and tightly incorporates them into a VIO with minimal impact on the runtime. HDVIO2.0 builds upon the previous work, HDVIO, and addresses these challenges through a hybrid dynamics model combining a point-mass vehicle model with a learning-based component, with access to control commands and IMU history, to capture complex aerodynamic effects. The key idea behind modeling the rotational dynamics is to represent them with continuous-time functions. HDVIO2.0 leverages the divergence between the actual motion and the predicted motion from the hybrid dynamics model to estimate external forces as well as the robot state. Our system surpasses the performance of state-of-the-art methods in experiments using public and new drone dynamics datasets, as well as real-world flights in winds up to 25 km/h. Unlike existing approaches, we also show that accurate vehicle dynamics predictions are achievable without precise knowledge of the full vehicle state.
LiDAR Registration with Visual Foundation Models
Feb 26, 2025LiDAR registration is a fundamental task in robotic mapping and localization. A critical component of aligning two point clouds is identifying robust point correspondences using point descriptors. This step becomes particularly challenging in scenarios involving domain shifts, seasonal changes, and variations in point cloud structures. These factors substantially impact both handcrafted and learning-based approaches. In this paper, we address these problems by proposing to use DINOv2 features, obtained from surround-view images, as point descriptors. We demonstrate that coupling these descriptors with traditional registration algorithms, such as RANSAC or ICP, facilitates robust 6DoF alignment of LiDAR scans with 3D maps, even when the map was recorded more than a year before. Although conceptually straightforward, our method substantially outperforms more complex baseline techniques. In contrast to previous learning-based point descriptors, our method does not require domain-specific retraining and is agnostic to the point cloud structure, effectively handling both sparse LiDAR scans and dense 3D maps. We show that leveraging the additional camera data enables our method to outperform the best baseline by +24.8 and +17.3 registration recall on the NCLT and Oxford RobotCar datasets. We publicly release the registration benchmark and the code of our work on https://vfm-registration.cs.uni-freiburg.de.
Drift-free Visual SLAM using Digital Twins
Dec 12, 2024



Globally-consistent localization in urban environments is crucial for autonomous systems such as self-driving vehicles and drones, as well as assistive technologies for visually impaired people. Traditional Visual-Inertial Odometry (VIO) and Visual Simultaneous Localization and Mapping (VSLAM) methods, though adequate for local pose estimation, suffer from drift in the long term due to reliance on local sensor data. While GPS counteracts this drift, it is unavailable indoors and often unreliable in urban areas. An alternative is to localize the camera to an existing 3D map using visual-feature matching. This can provide centimeter-level accurate localization but is limited by the visual similarities between the current view and the map. This paper introduces a novel approach that achieves accurate and globally-consistent localization by aligning the sparse 3D point cloud generated by the VIO/VSLAM system to a digital twin using point-to-plane matching; no visual data association is needed. The proposed method provides a 6-DoF global measurement tightly integrated into the VIO/VSLAM system. Experiments run on a high-fidelity GPS simulator and real-world data collected from a drone demonstrate that our approach outperforms state-of-the-art VIO-GPS systems and offers superior robustness against viewpoint changes compared to the state-of-the-art Visual SLAM systems.
Structure-Invariant Range-Visual-Inertial Odometry
Sep 06, 2024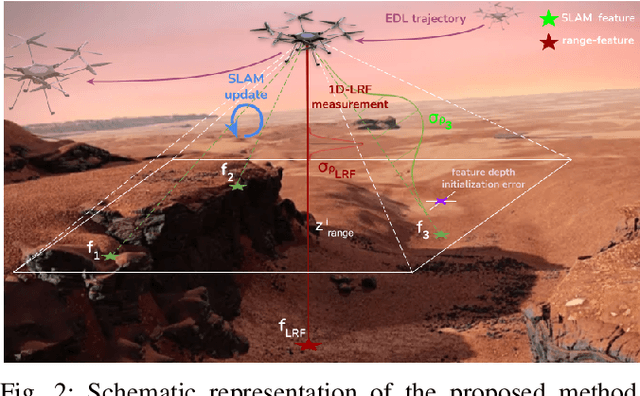


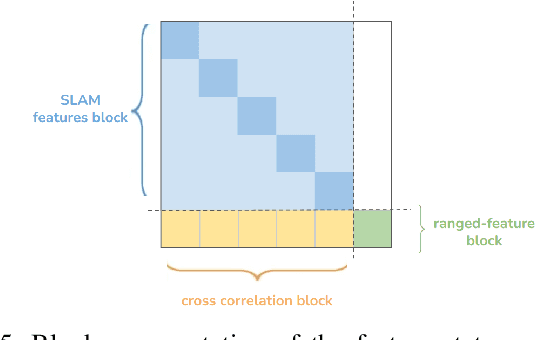
The Mars Science Helicopter (MSH) mission aims to deploy the next generation of unmanned helicopters on Mars, targeting landing sites in highly irregular terrain such as Valles Marineris, the largest canyons in the Solar system with elevation variances of up to 8000 meters. Unlike its predecessor, the Mars 2020 mission, which relied on a state estimation system assuming planar terrain, MSH requires a novel approach due to the complex topography of the landing site. This work introduces a novel range-visual-inertial odometry system tailored for the unique challenges of the MSH mission. Our system extends the state-of-the-art xVIO framework by fusing consistent range information with visual and inertial measurements, preventing metric scale drift in the absence of visual-inertial excitation (mono camera and constant velocity descent), and enabling landing on any terrain structure, without requiring any planar terrain assumption. Through extensive testing in image-based simulations using actual terrain structure and textures collected in Mars orbit, we demonstrate that our range-VIO approach estimates terrain-relative velocity meeting the stringent mission requirements, and outperforming existing methods.
Reinforcement Learning Meets Visual Odometry
Jul 22, 2024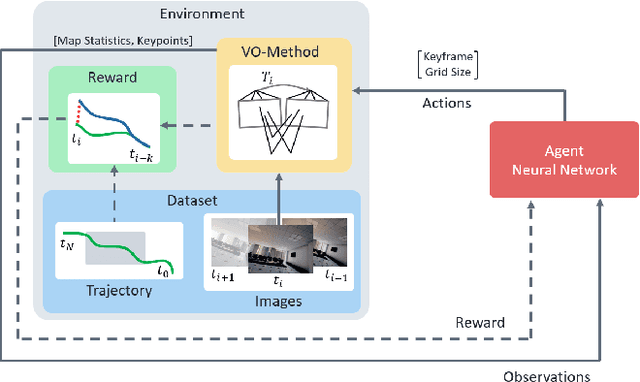

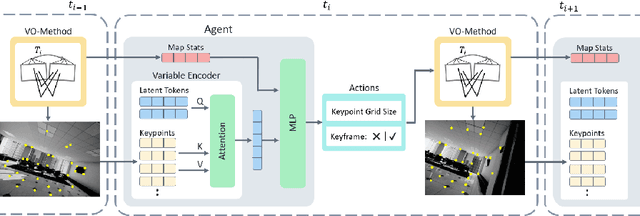

Visual Odometry (VO) is essential to downstream mobile robotics and augmented/virtual reality tasks. Despite recent advances, existing VO methods still rely on heuristic design choices that require several weeks of hyperparameter tuning by human experts, hindering generalizability and robustness. We address these challenges by reframing VO as a sequential decision-making task and applying Reinforcement Learning (RL) to adapt the VO process dynamically. Our approach introduces a neural network, operating as an agent within the VO pipeline, to make decisions such as keyframe and grid-size selection based on real-time conditions. Our method minimizes reliance on heuristic choices using a reward function based on pose error, runtime, and other metrics to guide the system. Our RL framework treats the VO system and the image sequence as an environment, with the agent receiving observations from keypoints, map statistics, and prior poses. Experimental results using classical VO methods and public benchmarks demonstrate improvements in accuracy and robustness, validating the generalizability of our RL-enhanced VO approach to different scenarios. We believe this paradigm shift advances VO technology by eliminating the need for time-intensive parameter tuning of heuristics.
AERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Jan 04, 2024Large-scale infrastructures are prone to deterioration due to age, environmental influences, and heavy usage. Ensuring their safety through regular inspections and maintenance is crucial to prevent incidents that can significantly affect public safety and the environment. This is especially pertinent in the context of electrical power networks, which, while essential for energy provision, can also be sources of forest fires. Intelligent drones have the potential to revolutionize inspection and maintenance, eliminating the risks for human operators, increasing productivity, reducing inspection time, and improving data collection quality. However, most of the current methods and technologies in aerial robotics have been trialed primarily in indoor testbeds or outdoor settings under strictly controlled conditions, always within the line of sight of human operators. Additionally, these methods and technologies have typically been evaluated in isolation, lacking comprehensive integration. This paper introduces the first autonomous system that combines various innovative aerial robots. This system is designed for extended-range inspections beyond the visual line of sight, features aerial manipulators for maintenance tasks, and includes support mechanisms for human operators working at elevated heights. The paper further discusses the successful validation of this system on numerous electrical power lines, with aerial robots executing flights over 10 kilometers away from their ground control stations.
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Jul 12, 2023Autonomous, agile quadrotor flight raises fundamental challenges for robotics research in terms of perception, planning, learning, and control. A versatile and standardized platform is needed to accelerate research and let practitioners focus on the core problems. To this end, we present Agilicious, a co-designed hardware and software framework tailored to autonomous, agile quadrotor flight. It is completely open-source and open-hardware and supports both model-based and neural-network--based controllers. Also, it provides high thrust-to-weight and torque-to-inertia ratios for agility, onboard vision sensors, GPU-accelerated compute hardware for real-time perception and neural-network inference, a real-time flight controller, and a versatile software stack. In contrast to existing frameworks, Agilicious offers a unique combination of flexible software stack and high-performance hardware. We compare Agilicious with prior works and demonstrate it on different agile tasks, using both model-based and neural-network--based controllers. Our demonstrators include trajectory tracking at up to 5g and 70 km/h in a motion-capture system, and vision-based acrobatic flight and obstacle avoidance in both structured and unstructured environments using solely onboard perception. Finally, we demonstrate its use for hardware-in-the-loop simulation in virtual-reality environments. Thanks to its versatility, we believe that Agilicious supports the next generation of scientific and industrial quadrotor research.
* 14 pages, 5 figures, 2 tables