 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGesture-Controlled Aerial Robot Formation for Human-Swarm Interaction in Safety Monitoring Applications
Mar 22, 2024
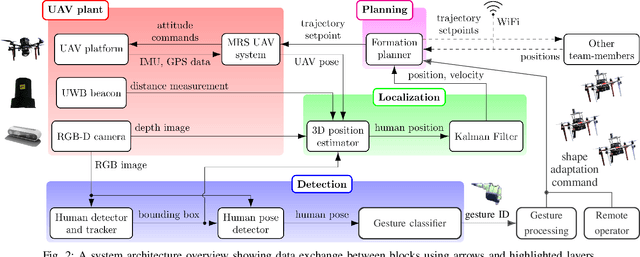
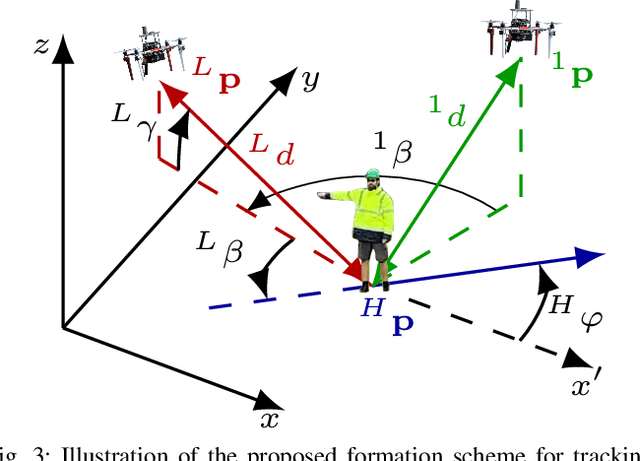
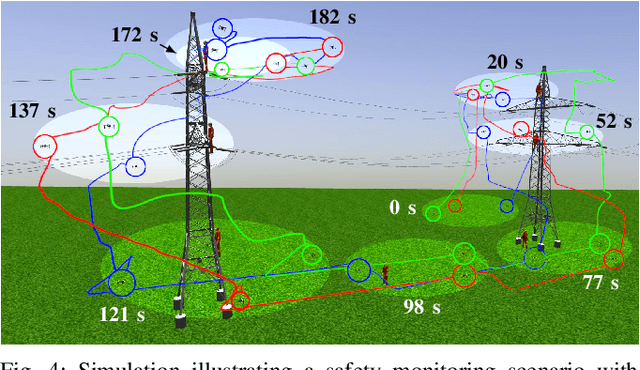
This paper presents a formation control approach for contactless gesture-based Human-Swarm Interaction (HSI) between a team of multi-rotor Unmanned Aerial Vehicles (UAVs) and a human worker. The approach is intended for monitoring the safety of human workers, especially those working at heights. In the proposed dynamic formation scheme, one UAV acts as the leader of the formation and is equipped with sensors for human worker detection and gesture recognition. The follower UAVs maintain a predetermined formation relative to the worker's position, thereby providing additional perspectives of the monitored scene. Hand gestures allow the human worker to specify movements and action commands for the UAV team and initiate other mission-related commands without the need for an additional communication channel or specific markers. Together with a novel unified human detection and tracking algorithm, human pose estimation approach and gesture detection pipeline, the proposed approach forms a first instance of an HSI system incorporating all these modules onboard real-world UAVs. Simulations and field experiments with three UAVs and a human worker in a mock-up scenario showcase the effectiveness and responsiveness of the proposed approach.
AERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Jan 04, 2024Large-scale infrastructures are prone to deterioration due to age, environmental influences, and heavy usage. Ensuring their safety through regular inspections and maintenance is crucial to prevent incidents that can significantly affect public safety and the environment. This is especially pertinent in the context of electrical power networks, which, while essential for energy provision, can also be sources of forest fires. Intelligent drones have the potential to revolutionize inspection and maintenance, eliminating the risks for human operators, increasing productivity, reducing inspection time, and improving data collection quality. However, most of the current methods and technologies in aerial robotics have been trialed primarily in indoor testbeds or outdoor settings under strictly controlled conditions, always within the line of sight of human operators. Additionally, these methods and technologies have typically been evaluated in isolation, lacking comprehensive integration. This paper introduces the first autonomous system that combines various innovative aerial robots. This system is designed for extended-range inspections beyond the visual line of sight, features aerial manipulators for maintenance tasks, and includes support mechanisms for human operators working at elevated heights. The paper further discusses the successful validation of this system on numerous electrical power lines, with aerial robots executing flights over 10 kilometers away from their ground control stations.