 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmnidirectional Solid-State mmWave Radar Perception for UAV Power Line Collision Avoidance
Feb 03, 2026Detecting and estimating distances to power lines is a challenge for both human UAV pilots and autonomous systems, which increases the risk of unintended collisions. We present a mmWave radar-based perception system that provides spherical sensing coverage around a small UAV for robust power line detection and avoidance. The system integrates multiple compact solid-state mmWave radar modules to synthesize an omnidirectional field of view while remaining lightweight. We characterize the sensing behavior of this omnidirectional radar arrangement in power line environments and develop a robust detection-and-avoidance algorithm tailored to that behavior. Field experiments on real power lines demonstrate reliable detection at ranges up to 10 m, successful avoidance maneuvers at flight speeds upwards of 10 m/s, and detection of wires as thin as 1.2 mm in diameter. These results indicate the approach's suitability as an additional safety layer for both autonomous and manual UAV flight.
Autonomous Overhead Powerline Recharging for Uninterrupted Drone Operations
Mar 11, 2024We present a fully autonomous self-recharging drone system capable of long-duration sustained operations near powerlines. The drone is equipped with a robust onboard perception and navigation system that enables it to locate powerlines and approach them for landing. A passively actuated gripping mechanism grasps the powerline cable during landing after which a control circuit regulates the magnetic field inside a split-core current transformer to provide sufficient holding force as well as battery recharging. The system is evaluated in an active outdoor three-phase powerline environment. We demonstrate multiple contiguous hours of fully autonomous uninterrupted drone operations composed of several cycles of flying, landing, recharging, and takeoff, validating the capability of extended, essentially unlimited, operational endurance.
AERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Jan 04, 2024Large-scale infrastructures are prone to deterioration due to age, environmental influences, and heavy usage. Ensuring their safety through regular inspections and maintenance is crucial to prevent incidents that can significantly affect public safety and the environment. This is especially pertinent in the context of electrical power networks, which, while essential for energy provision, can also be sources of forest fires. Intelligent drones have the potential to revolutionize inspection and maintenance, eliminating the risks for human operators, increasing productivity, reducing inspection time, and improving data collection quality. However, most of the current methods and technologies in aerial robotics have been trialed primarily in indoor testbeds or outdoor settings under strictly controlled conditions, always within the line of sight of human operators. Additionally, these methods and technologies have typically been evaluated in isolation, lacking comprehensive integration. This paper introduces the first autonomous system that combines various innovative aerial robots. This system is designed for extended-range inspections beyond the visual line of sight, features aerial manipulators for maintenance tasks, and includes support mechanisms for human operators working at elevated heights. The paper further discusses the successful validation of this system on numerous electrical power lines, with aerial robots executing flights over 10 kilometers away from their ground control stations.
A Framework for Detecting and Translating User Behavior from Smart Meter Data
Jun 13, 2018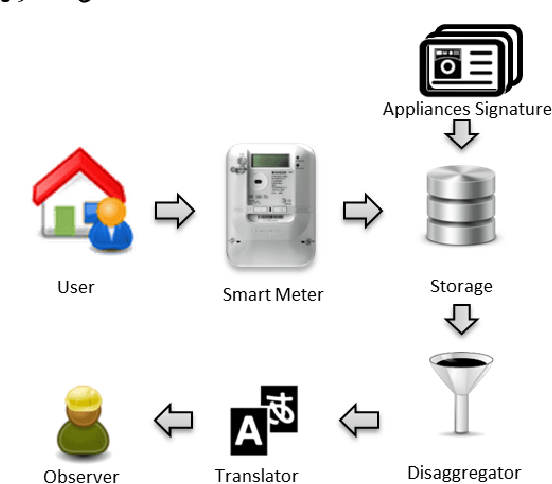
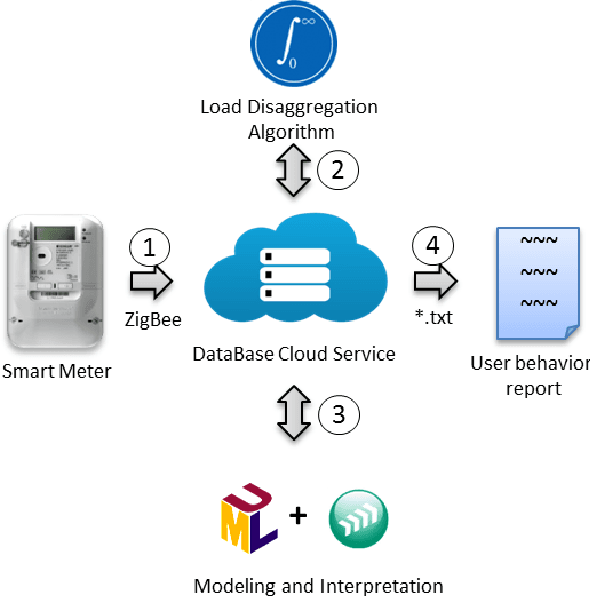
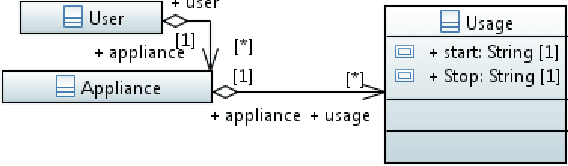

The European adoption of smart electricity meters triggers the developments of new value-added service for smart energy and optimal consumption. Recently, several algorithms and tools have been built to analyze smart meter's data. This paper introduces an open framework and prototypes for detecting and presenting user behavior from its smart meter power consumption data. The framework aims at presenting the detected user behavior in natural language reports. In order to validate the proposed framework, an experiment has been performed and the results have been presented.