 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Inspection of Power Line Insulators with UAV on an Unmapped Transmission Tower
Feb 27, 2026This paper introduces an online inspection algorithm that enables an autonomous UAV to fly around a transmission tower and obtain detailed inspection images without a prior map of the tower. Our algorithm relies on camera-LiDAR sensor fusion for online detection and localization of insulators. In particular, the algorithm is based on insulator detection using a convolutional neural network, projection of LiDAR points onto the image, and filtering them using the bounding boxes. The detection pipeline is coupled with several proposed insulator localization methods based on DBSCAN, RANSAC, and PCA algorithms. The performance of the proposed online inspection algorithm and camera-LiDAR sensor fusion pipeline is demonstrated through simulation and real-world flights. In simulation, we showed that our single-flight inspection strategy can save up to 24 % of total inspection time, compared to the two-flight strategy of scanning the tower and afterwards visiting the inspection waypoints in the optimal way. In a real-world experiment, the best performing proposed method achieves a mean horizontal and vertical localization error for the insulator of 0.16 +- 0.08 m and 0.16 +- 0.11 m, respectively. Compared to the most relevant approach, the proposed method achieves more than an order of magnitude lower variance in horizontal insulator localization error.
Vision-only UAV State Estimation for Fast Flights Without External Localization Systems: A2RL Drone Racing Finalist Approach
Feb 02, 2026Fast flights with aggressive maneuvers in cluttered GNSS-denied environments require fast, reliable, and accurate UAV state estimation. In this paper, we present an approach for onboard state estimation of a high-speed UAV using a monocular RGB camera and an IMU. Our approach fuses data from Visual-Inertial Odometry (VIO), an onboard landmark-based camera measurement system, and an IMU to produce an accurate state estimate. Using onboard measurement data, we estimate and compensate for VIO drift through a novel mathematical drift model. State-of-the-art approaches often rely on more complex hardware (e.g., stereo cameras or rangefinders) and use uncorrected drifting VIO velocities, orientation, and angular rates, leading to errors during fast maneuvers. In contrast, our method corrects all VIO states (position, orientation, linear and angular velocity), resulting in accurate state estimation even during rapid and dynamic motion. Our approach was thoroughly validated through 1600 simulations and numerous real-world experiments. Furthermore, we applied the proposed method in the A2RL Drone Racing Challenge 2025, where our team advanced to the final four out of 210 teams and earned a medal.
KRRF: Kinodynamic Rapidly-exploring Random Forest algorithm for multi-goal motion planning
May 09, 2025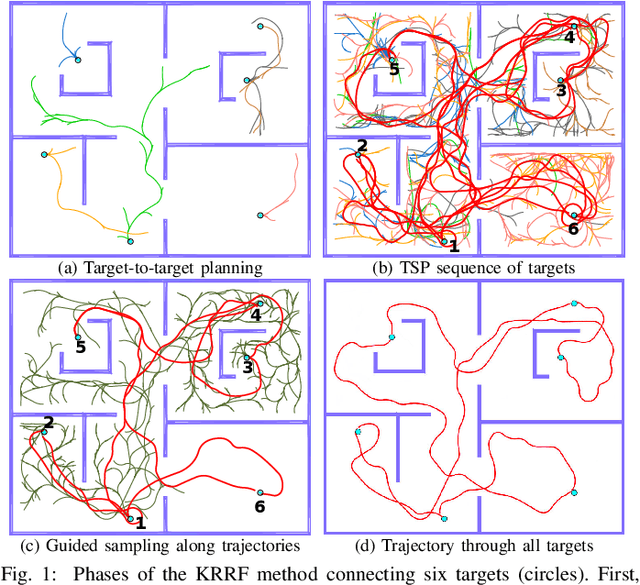

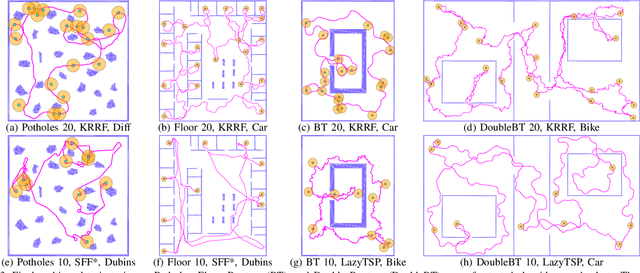
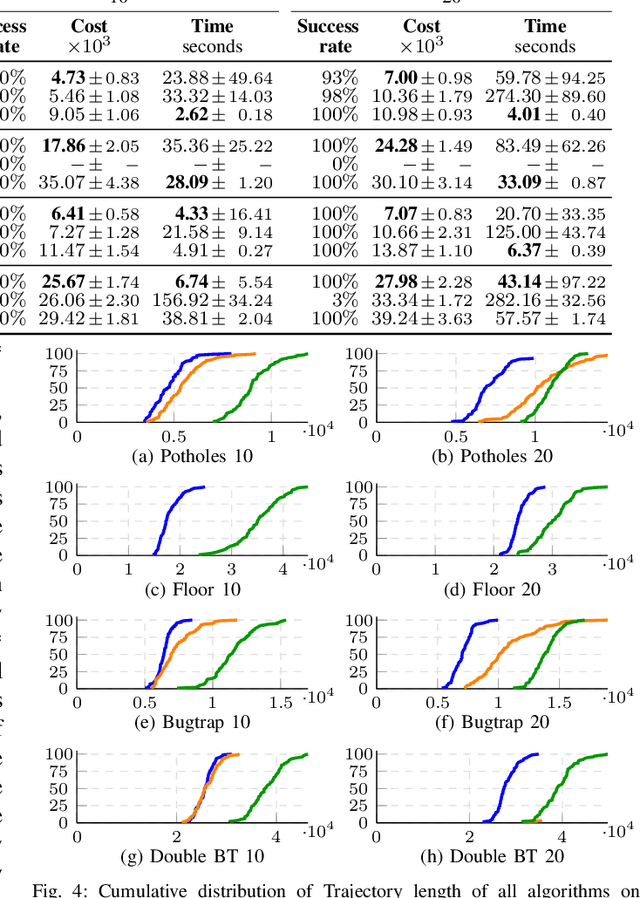
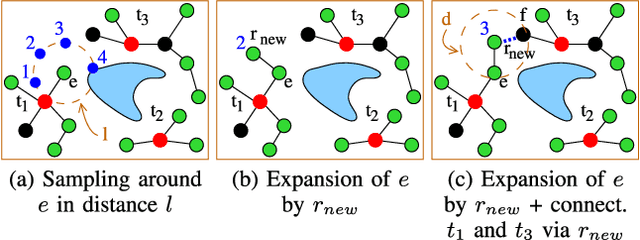
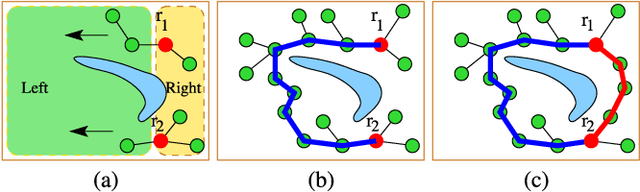
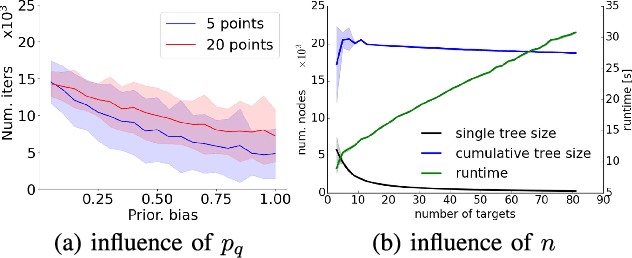
The problem of kinodynamic multi-goal motion planning is to find a trajectory over multiple target locations with an apriori unknown sequence of visits. The objective is to minimize the cost of the trajectory planned in a cluttered environment for a robot with a kinodynamic motion model. This problem has yet to be efficiently solved as it combines two NP-hard problems, the Traveling Salesman Problem~(TSP) and the kinodynamic motion planning problem. We propose a novel approximate method called Kinodynamic Rapidly-exploring Random Forest~(KRRF) to find a collision-free multi-goal trajectory that satisfies the motion constraints of the robot. KRRF simultaneously grows kinodynamic trees from all targets towards all other targets while using the other trees as a heuristic to boost the growth. Once the target-to-target trajectories are planned, their cost is used to solve the TSP to find the sequence of targets. The final multi-goal trajectory satisfying kinodynamic constraints is planned by guiding the RRT-based planner along the target-to-target trajectories in the TSP sequence. Compared with existing approaches, KRRF provides shorter target-to-target trajectories and final multi-goal trajectories with $1.1-2$ times lower costs while being computationally faster in most test cases. The method will be published as an open-source library.
FlightForge: Advancing UAV Research with Procedural Generation of High-Fidelity Simulation and Integrated Autonomy
Feb 07, 2025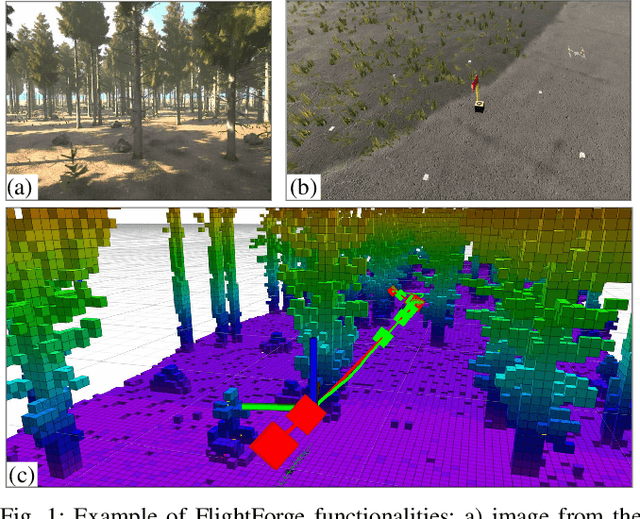
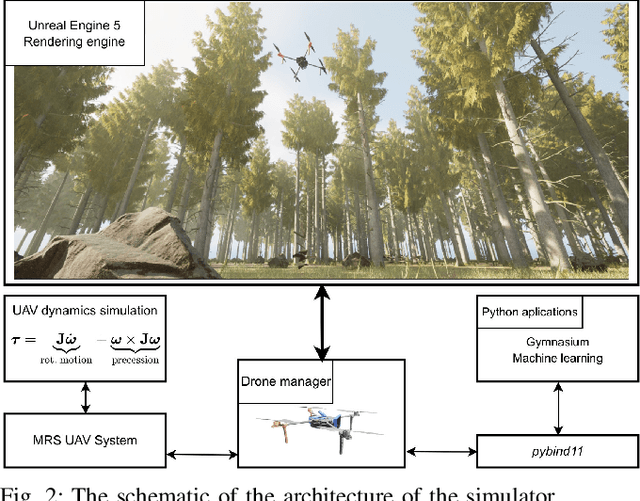
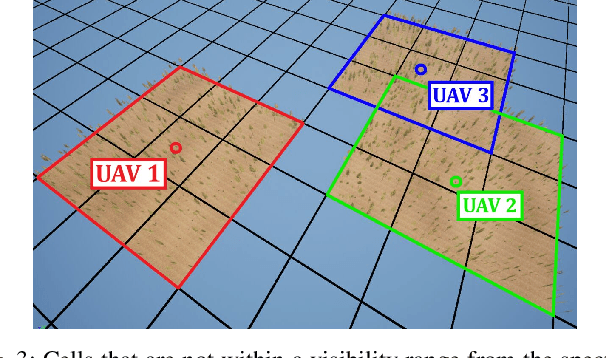
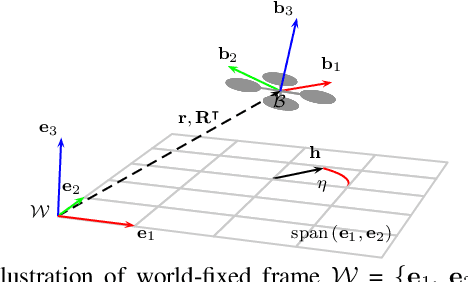
Robotic simulators play a crucial role in the development and testing of autonomous systems, particularly in the realm of Uncrewed Aerial Vehicles (UAV). However, existing simulators often lack high-level autonomy, hindering their immediate applicability to complex tasks such as autonomous navigation in unknown environments. This limitation stems from the challenge of integrating realistic physics, photorealistic rendering, and diverse sensor modalities into a single simulation environment. At the same time, the existing photorealistic UAV simulators use mostly hand-crafted environments with limited environment sizes, which prevents the testing of long-range missions. This restricts the usage of existing simulators to only low-level tasks such as control and collision avoidance. To this end, we propose the novel FlightForge UAV open-source simulator. FlightForge offers advanced rendering capabilities, diverse control modalities, and, foremost, procedural generation of environments. Moreover, the simulator is already integrated with a fully autonomous UAV system capable of long-range flights in cluttered unknown environments. The key innovation lies in novel procedural environment generation and seamless integration of high-level autonomy into the simulation environment. Experimental results demonstrate superior sensor rendering capability compared to existing simulators, and also the ability of autonomous navigation in almost infinite environments.
Model predictive control-based trajectory generation for agile landing of unmanned aerial vehicle on a moving boat
Dec 10, 2024This paper proposes a novel trajectory generation method based on Model Predictive Control (MPC) for agile landing of an Unmanned Aerial Vehicle (UAV) onto an Unmanned Surface Vehicle (USV)'s deck in harsh conditions. The trajectory generation exploits the state predictions of the USV to create periodically updated trajectories for a multirotor UAV to precisely land on the deck of a moving USV even in cases where the deck's inclination is continuously changing. We use an MPC-based scheme to create trajectories that consider both the UAV dynamics and the predicted states of the USV up to the first derivative of position and orientation. Compared to existing approaches, our method dynamically modifies the penalization matrices to precisely follow the corresponding states with respect to the flight phase. Especially during the landing maneuver, the UAV synchronizes attitude with the USV's, allowing for fast landing on a tilted deck. Simulations show the method's reliability in various sea conditions up to Rough sea (wave height 4 m), outperforming state-of-the-art methods in landing speed and accuracy, with twice the precision on average. Finally, real-world experiments validate the simulation results, demonstrating robust landings on a moving USV, while all computations are performed in real-time onboard the UAV.
* 18 pages, 17 figures, Ocean Engineering
Gesture-Controlled Aerial Robot Formation for Human-Swarm Interaction in Safety Monitoring Applications
Mar 22, 2024
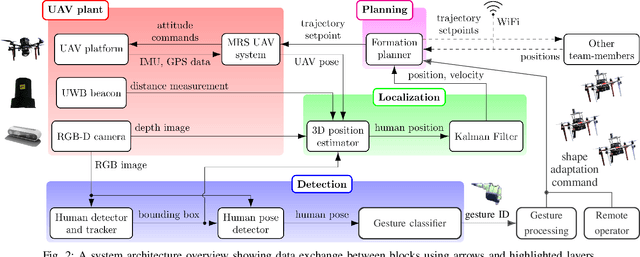
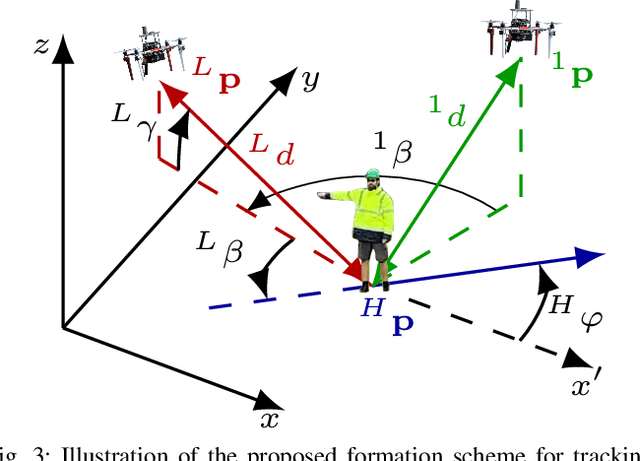
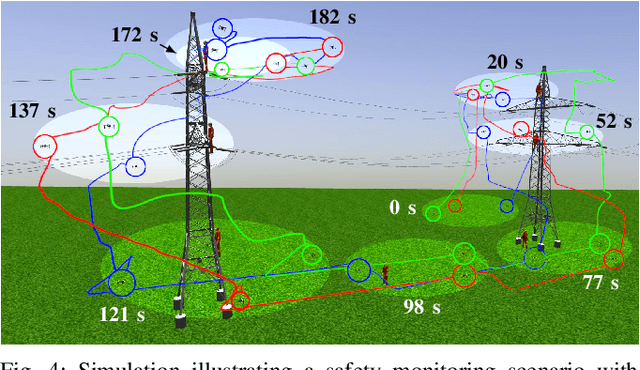
This paper presents a formation control approach for contactless gesture-based Human-Swarm Interaction (HSI) between a team of multi-rotor Unmanned Aerial Vehicles (UAVs) and a human worker. The approach is intended for monitoring the safety of human workers, especially those working at heights. In the proposed dynamic formation scheme, one UAV acts as the leader of the formation and is equipped with sensors for human worker detection and gesture recognition. The follower UAVs maintain a predetermined formation relative to the worker's position, thereby providing additional perspectives of the monitored scene. Hand gestures allow the human worker to specify movements and action commands for the UAV team and initiate other mission-related commands without the need for an additional communication channel or specific markers. Together with a novel unified human detection and tracking algorithm, human pose estimation approach and gesture detection pipeline, the proposed approach forms a first instance of an HSI system incorporating all these modules onboard real-world UAVs. Simulations and field experiments with three UAVs and a human worker in a mock-up scenario showcase the effectiveness and responsiveness of the proposed approach.
Metaheuristic planner for cooperative multi-agent wall construction with UAVs
May 25, 2023This paper introduces a wall construction planner for Unmanned Aerial Vehicles (UAVs), which uses a Greedy Randomized Adaptive Search Procedure (GRASP) metaheuristic to generate near-time-optimal building plans for even large walls within seconds. This approach addresses one of the most time-consuming and labor-intensive tasks, while also minimizing workers' safety risks. To achieve this, the wall-building problem is modeled as a variant of the Team Orienteering Problem and is formulated as Mixed-Integer Linear Programming (MILP), with added precedence and concurrence constraints that ensure bricks are built in the correct order and without collision between cooperating agents. The GRASP planner is validated in a realistic simulation and demonstrated to find solutions with similar quality as the optimal MILP, but much faster. Moreover, it outperforms all other state-of-the-art planning approaches in the majority of test cases. This paper presents a significant advancement in the field of automated wall construction, demonstrating the potential of UAVs and optimization algorithms in improving the efficiency and safety of construction projects.
Multi-goal path planning using multiple random trees
Jun 07, 2021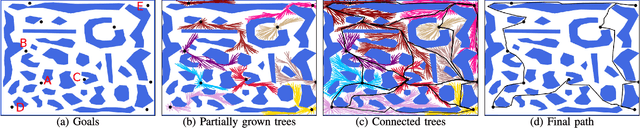
In this paper, we propose a novel sampling-based planner for multi-goal path planning among obstacles, where the objective is to visit predefined target locations while minimizing the travel costs. The order of visiting the targets is often achieved by solving the Traveling Salesman Problem (TSP) or its variants. TSP requires to define costs between the individual targets, which - in a map with obstacles - requires to compute mutual paths between the targets. These paths, found by path planning, are used both to define the costs (e.g., based on their length or time-to-traverse) and also they define paths that are later used in the final solution. To enable TSP finding a good-quality solution, it is necessary to find these target-to-target paths as short as possible. We propose a sampling-based planner called Space-Filling Forest (SFF*) that solves the part of finding collision-free paths. SFF* uses multiple trees (forest) constructed gradually and simultaneously from the targets and attempts to find connections with other trees to form the paths. Unlike Rapidly-exploring Random Tree (RRT), which uses the nearest-neighbor rule for selecting nodes for expansion, SFF* maintains an explicit list of nodes for expansion. Individual trees are grown in a RRT* manner, i.e., with rewiring the nodes to minimize their cost. Computational results show that SFF* provides shorter target-to-target paths than existing approaches, and consequently, the final TSP solutions also have a lower cost.