 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Joint Grasp and Motion Planning in Confined Spaces
May 12, 2025Robotic grasping is a fundamental skill across all domains of robot applications. There is a large body of research for grasping objects in table-top scenarios, where finding suitable grasps is the main challenge. In this work, we are interested in scenarios where the objects are in confined spaces and hence particularly difficult to reach. Planning how the robot approaches the object becomes a major part of the challenge, giving rise to methods for joint grasp and motion planning. The framework proposed in this paper provides 20 benchmark scenarios with systematically increasing difficulty, realistic objects with precomputed grasp annotations, and tools to create and share more scenarios. We further provide two baseline planners and evaluate them on the scenarios, demonstrating that the proposed difficulty levels indeed offer a meaningful progression. We invite the research community to build upon this framework by making all components publicly available as open source.
* 2024 13th International Workshop on Robot Motion and Control (RoMoCo)
KRRF: Kinodynamic Rapidly-exploring Random Forest algorithm for multi-goal motion planning
May 09, 2025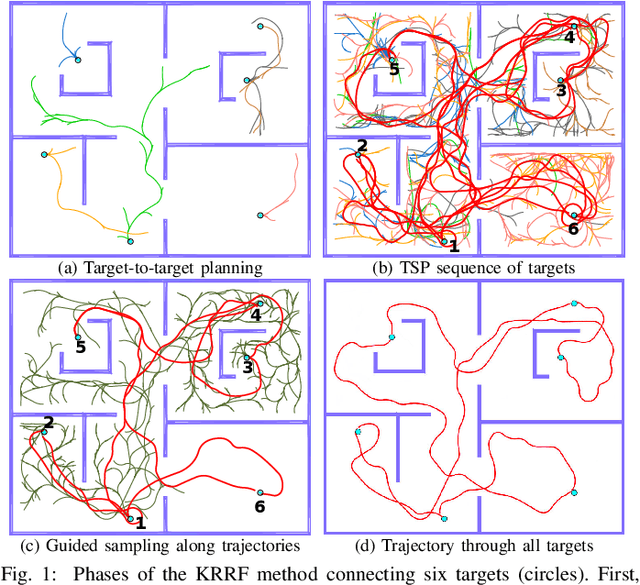

The problem of kinodynamic multi-goal motion planning is to find a trajectory over multiple target locations with an apriori unknown sequence of visits. The objective is to minimize the cost of the trajectory planned in a cluttered environment for a robot with a kinodynamic motion model. This problem has yet to be efficiently solved as it combines two NP-hard problems, the Traveling Salesman Problem~(TSP) and the kinodynamic motion planning problem. We propose a novel approximate method called Kinodynamic Rapidly-exploring Random Forest~(KRRF) to find a collision-free multi-goal trajectory that satisfies the motion constraints of the robot. KRRF simultaneously grows kinodynamic trees from all targets towards all other targets while using the other trees as a heuristic to boost the growth. Once the target-to-target trajectories are planned, their cost is used to solve the TSP to find the sequence of targets. The final multi-goal trajectory satisfying kinodynamic constraints is planned by guiding the RRT-based planner along the target-to-target trajectories in the TSP sequence. Compared with existing approaches, KRRF provides shorter target-to-target trajectories and final multi-goal trajectories with $1.1-2$ times lower costs while being computationally faster in most test cases. The method will be published as an open-source library.
Asymptotically Optimal Path Planning With an Approximation of the Omniscient Set
Mar 20, 2025The asymptotically optimal version of Rapidly-exploring Random Tree (RRT*) is often used to find optimal paths in a high-dimensional configuration space. The well-known issue of RRT* is its slow convergence towards the optimal solution. A possible solution is to draw random samples only from a subset of the configuration space that is known to contain configurations that can improve the cost of the path (omniscient set). A fast convergence rate may be achieved by approximating the omniscient with a low-volume set. In this letter, we propose new methods to approximate the omniscient set and methods for their effective sampling. First, we propose to approximate the omniscient set using several (small) hyperellipsoids defined by sections of the current best solution. The second approach approximates the omniscient set by a convex hull computed from the current solution. Both approaches ensure asymptotical optimality and work in a general n-dimensional configuration space. The experiments have shown superior performance of our approaches in multiple scenarios in 3D and 6D configuration spaces.
* 9 pages, 13 figures
FlightForge: Advancing UAV Research with Procedural Generation of High-Fidelity Simulation and Integrated Autonomy
Feb 07, 2025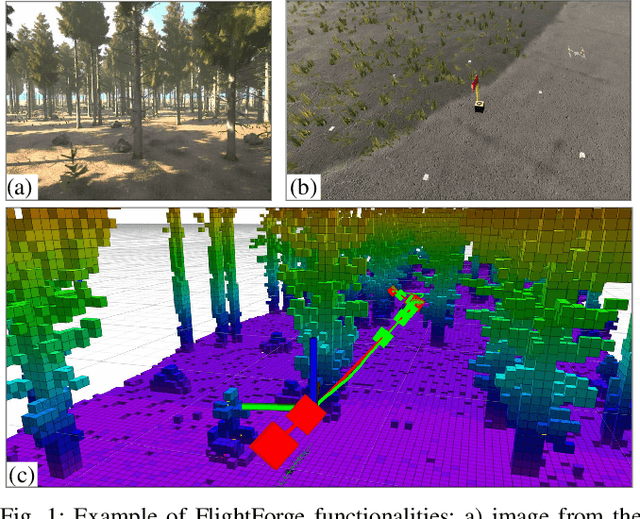
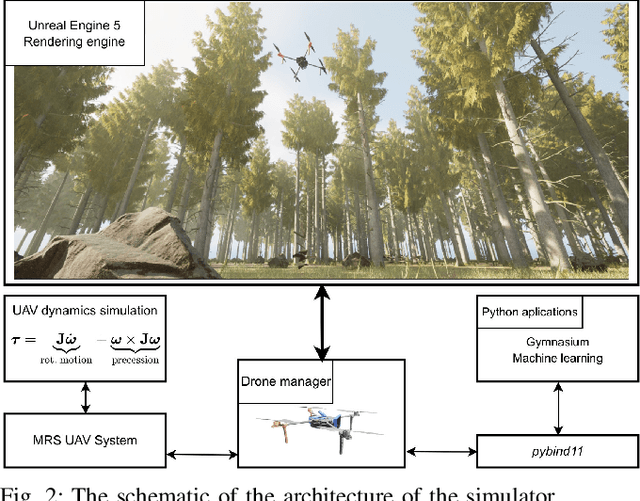
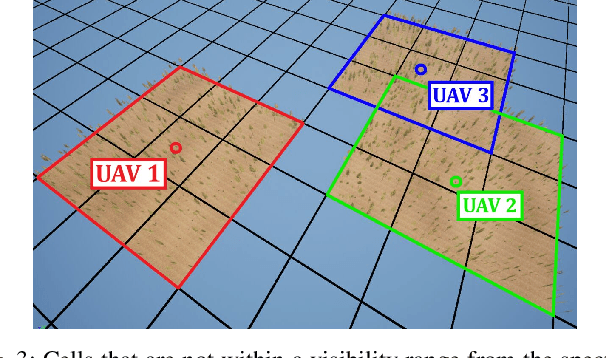
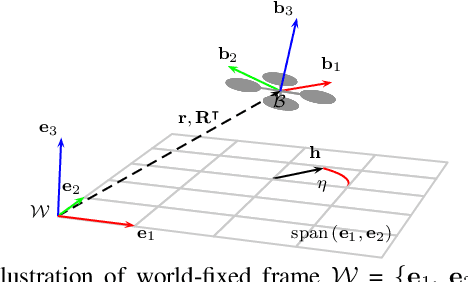
Robotic simulators play a crucial role in the development and testing of autonomous systems, particularly in the realm of Uncrewed Aerial Vehicles (UAV). However, existing simulators often lack high-level autonomy, hindering their immediate applicability to complex tasks such as autonomous navigation in unknown environments. This limitation stems from the challenge of integrating realistic physics, photorealistic rendering, and diverse sensor modalities into a single simulation environment. At the same time, the existing photorealistic UAV simulators use mostly hand-crafted environments with limited environment sizes, which prevents the testing of long-range missions. This restricts the usage of existing simulators to only low-level tasks such as control and collision avoidance. To this end, we propose the novel FlightForge UAV open-source simulator. FlightForge offers advanced rendering capabilities, diverse control modalities, and, foremost, procedural generation of environments. Moreover, the simulator is already integrated with a fully autonomous UAV system capable of long-range flights in cluttered unknown environments. The key innovation lies in novel procedural environment generation and seamless integration of high-level autonomy into the simulation environment. Experimental results demonstrate superior sensor rendering capability compared to existing simulators, and also the ability of autonomous navigation in almost infinite environments.
Multi-goal path planning using multiple random trees
Jun 07, 2021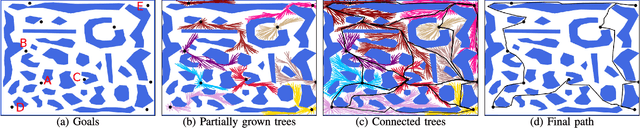
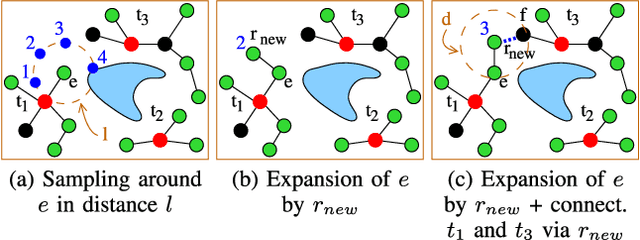
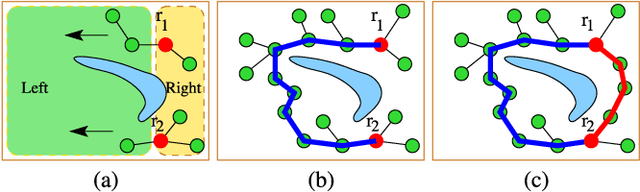
In this paper, we propose a novel sampling-based planner for multi-goal path planning among obstacles, where the objective is to visit predefined target locations while minimizing the travel costs. The order of visiting the targets is often achieved by solving the Traveling Salesman Problem (TSP) or its variants. TSP requires to define costs between the individual targets, which - in a map with obstacles - requires to compute mutual paths between the targets. These paths, found by path planning, are used both to define the costs (e.g., based on their length or time-to-traverse) and also they define paths that are later used in the final solution. To enable TSP finding a good-quality solution, it is necessary to find these target-to-target paths as short as possible. We propose a sampling-based planner called Space-Filling Forest (SFF*) that solves the part of finding collision-free paths. SFF* uses multiple trees (forest) constructed gradually and simultaneously from the targets and attempts to find connections with other trees to form the paths. Unlike Rapidly-exploring Random Tree (RRT), which uses the nearest-neighbor rule for selecting nodes for expansion, SFF* maintains an explicit list of nodes for expansion. Individual trees are grown in a RRT* manner, i.e., with rewiring the nodes to minimize their cost. Computational results show that SFF* provides shorter target-to-target paths than existing approaches, and consequently, the final TSP solutions also have a lower cost.