 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlightForge: Advancing UAV Research with Procedural Generation of High-Fidelity Simulation and Integrated Autonomy
Feb 07, 2025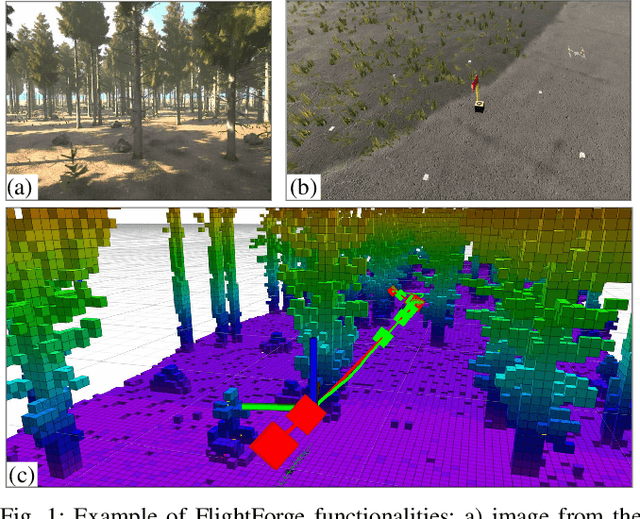
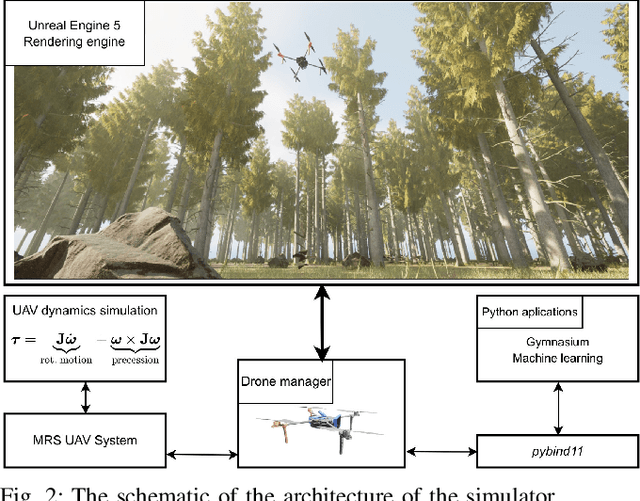
Robotic simulators play a crucial role in the development and testing of autonomous systems, particularly in the realm of Uncrewed Aerial Vehicles (UAV). However, existing simulators often lack high-level autonomy, hindering their immediate applicability to complex tasks such as autonomous navigation in unknown environments. This limitation stems from the challenge of integrating realistic physics, photorealistic rendering, and diverse sensor modalities into a single simulation environment. At the same time, the existing photorealistic UAV simulators use mostly hand-crafted environments with limited environment sizes, which prevents the testing of long-range missions. This restricts the usage of existing simulators to only low-level tasks such as control and collision avoidance. To this end, we propose the novel FlightForge UAV open-source simulator. FlightForge offers advanced rendering capabilities, diverse control modalities, and, foremost, procedural generation of environments. Moreover, the simulator is already integrated with a fully autonomous UAV system capable of long-range flights in cluttered unknown environments. The key innovation lies in novel procedural environment generation and seamless integration of high-level autonomy into the simulation environment. Experimental results demonstrate superior sensor rendering capability compared to existing simulators, and also the ability of autonomous navigation in almost infinite environments.
Applying Strategic Multiagent Planning to Real-World Travel Sharing Problems
Jan 02, 2013


Travel sharing, i.e., the problem of finding parts of routes which can be shared by several travellers with different points of departure and destinations, is a complex multiagent problem that requires taking into account individual agents' preferences to come up with mutually acceptable joint plans. In this paper, we apply state-of-the-art planning techniques to real-world public transportation data to evaluate the feasibility of multiagent planning techniques in this domain. The potential application value of improving travel sharing technology has great application value due to its ability to reduce the environmental impact of travelling while providing benefits to travellers at the same time. We propose a three-phase algorithm that utilises performant single-agent planners to find individual plans in a simplified domain first, then merges them using a best-response planner which ensures resulting solutions are individually rational, and then maps the resulting plan onto the full temporal planning domain to schedule actual journeys. The evaluation of our algorithm on real-world, multi-modal public transportation data for the United Kingdom shows linear scalability both in the scenario size and in the number of agents, where trade-offs have to be made between total cost improvement, the percentage of feasible timetables identified for journeys, and the prolongation of these journeys. Our system constitutes the first implementation of strategic multiagent planning algorithms in large-scale domains and provides insights into the engineering process of translating general domain-independent multiagent planning algorithms to real-world applications.