 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn rapid parallel tuning of controllers of a swarm of MAVs -- distribution strategies of the updated gains
May 12, 2025In this paper, we present a reliable, scalable, time deterministic, model-free procedure to tune swarms of Micro Aerial Vehicles (MAVs) using basic sensory data. Two approaches to taking advantage of parallel tuning are presented. First, the tuning with averaging of the results on the basis of performance indices reported from the swarm with identical gains to decrease the negative effect of the noise in the measurements. Second, the tuning with parallel testing of varying set of gains across the swarm to reduce the tuning time. The presented methods were evaluated both in simulation and real-world experiments. The achieved results show the ability of the proposed approach to improve the results of the tuning while decreasing the tuning time, ensuring at the same time a reliable tuning mechanism.
* 7 pages, 7 figures
FlightForge: Advancing UAV Research with Procedural Generation of High-Fidelity Simulation and Integrated Autonomy
Feb 07, 2025Robotic simulators play a crucial role in the development and testing of autonomous systems, particularly in the realm of Uncrewed Aerial Vehicles (UAV). However, existing simulators often lack high-level autonomy, hindering their immediate applicability to complex tasks such as autonomous navigation in unknown environments. This limitation stems from the challenge of integrating realistic physics, photorealistic rendering, and diverse sensor modalities into a single simulation environment. At the same time, the existing photorealistic UAV simulators use mostly hand-crafted environments with limited environment sizes, which prevents the testing of long-range missions. This restricts the usage of existing simulators to only low-level tasks such as control and collision avoidance. To this end, we propose the novel FlightForge UAV open-source simulator. FlightForge offers advanced rendering capabilities, diverse control modalities, and, foremost, procedural generation of environments. Moreover, the simulator is already integrated with a fully autonomous UAV system capable of long-range flights in cluttered unknown environments. The key innovation lies in novel procedural environment generation and seamless integration of high-level autonomy into the simulation environment. Experimental results demonstrate superior sensor rendering capability compared to existing simulators, and also the ability of autonomous navigation in almost infinite environments.
Towards Agile Swarming in Real World: Onboard Relative Localization with Fast Tracking of Active Blinking Markers
Feb 03, 2025A novel onboard tracking approach enabling vision-based relative localization and communication using Active blinking Marker Tracking (AMT) is introduced in this article. Active blinking markers on multi-robot team members improve the robustness of relative localization for aerial vehicles in tightly coupled swarms during real-world deployments, while also serving as a resilient communication channel. Traditional tracking algorithms struggle to track fast moving blinking markers due to their intermittent appearance in the camera frames. AMT addresses this by using weighted polynomial regression to predict the future appearance of active blinking markers while accounting for uncertainty in the prediction. In outdoor experiments, the AMT approach outperformed state-of-the-art methods in tracking density, accuracy, and complexity. The experimental validation of this novel tracking approach for relative localization involved testing motion patterns motivated by our research on agile multi-robot deployment.
Model predictive control-based trajectory generation for agile landing of unmanned aerial vehicle on a moving boat
Dec 10, 2024This paper proposes a novel trajectory generation method based on Model Predictive Control (MPC) for agile landing of an Unmanned Aerial Vehicle (UAV) onto an Unmanned Surface Vehicle (USV)'s deck in harsh conditions. The trajectory generation exploits the state predictions of the USV to create periodically updated trajectories for a multirotor UAV to precisely land on the deck of a moving USV even in cases where the deck's inclination is continuously changing. We use an MPC-based scheme to create trajectories that consider both the UAV dynamics and the predicted states of the USV up to the first derivative of position and orientation. Compared to existing approaches, our method dynamically modifies the penalization matrices to precisely follow the corresponding states with respect to the flight phase. Especially during the landing maneuver, the UAV synchronizes attitude with the USV's, allowing for fast landing on a tilted deck. Simulations show the method's reliability in various sea conditions up to Rough sea (wave height 4 m), outperforming state-of-the-art methods in landing speed and accuracy, with twice the precision on average. Finally, real-world experiments validate the simulation results, demonstrating robust landings on a moving USV, while all computations are performed in real-time onboard the UAV.
* 18 pages, 17 figures, Ocean Engineering
Autonomous localization of multiple ionizing radiation sources using miniature single-layer Compton cameras onboard a group of micro aerial vehicles
Oct 09, 2024
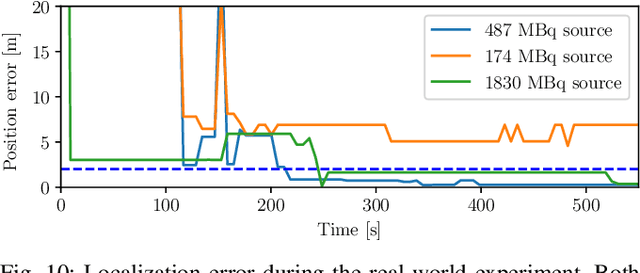
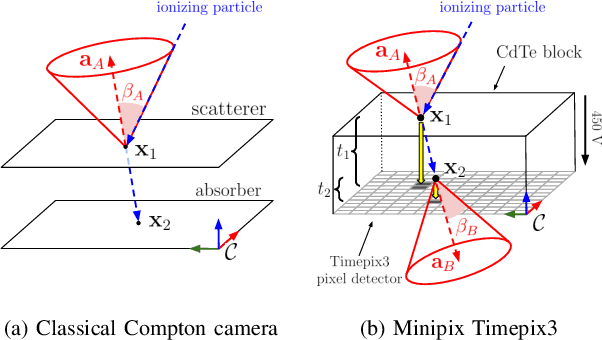
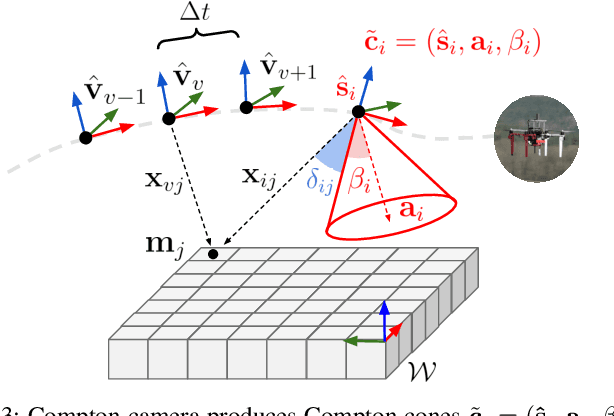
A novel method for autonomous localization of multiple sources of gamma radiation using a group of Micro Aerial Vehicles (MAVs) is presented in this paper. The method utilizes an extremely lightweight (44 g) Compton camera MiniPIX TPX3. The compact size of the detector allows for deployment onboard safe and agile small-scale Unmanned Aerial Vehicles (UAVs). The proposed radiation mapping approach fuses measurements from multiple distributed Compton camera sensors to accurately estimate the positions of multiple radioactive sources in real time. Unlike commonly used intensity-based detectors, the Compton camera reconstructs the set of possible directions towards a radiation source from just a single ionizing particle. Therefore, the proposed approach can localize radiation sources without having to estimate the gradient of a radiation field or contour lines, which require longer measurements. The instant estimation is able to fully exploit the potential of highly mobile MAVs. The radiation mapping method is combined with an active search strategy, which coordinates the future actions of the MAVs in order to improve the quality of the estimate of the sources' positions, as well as to explore the area of interest faster. The proposed solution is evaluated in simulation and real world experiments with multiple Cesium-137 radiation sources.
State Estimation of Marine Vessels Affected by Waves by Unmanned Aerial Vehicles
Oct 07, 2024A novel approach for robust state estimation of marine vessels in rough water is proposed in this paper to enable tight collaboration between Unmanned Aerial Vehicles (UAVs) and a marine vessel, such as cooperative landing or object manipulation, regardless of weather conditions. Our study of marine vessel (in our case Unmanned Surface Vehicle (USV)) dynamics influenced by strong wave motion has resulted in a novel nonlinear mathematical USV model with 6 degrees of freedom (DOFs), which is required for precise USV state estimation and motion prediction. The proposed state estimation approach fuses data from multiple sensors onboard the UAV and the USV to enable redundancy and robustness under varying weather conditions of real-world applications. The proposed approach provides estimated states of the USV with 6 DOFs and predicts its future states to enable tight control of both vehicles on a receding control horizon. The proposed approach was extensively tested in the realistic Gazebo simulator and successfully experimentally validated in many real-world experiments representing different application scenarios, including agile landing on an oscillating and moving USV. A comparative study indicates that the proposed approach significantly surpassed the current state-of-the-art.
Fast Collective Evasion in Self-Localized Swarms of Unmanned Aerial Vehicles
Aug 20, 2024A novel approach for achieving fast evasion in self-localized swarms of Unmanned Aerial Vehicles (UAVs) threatened by an intruding moving object is presented in this paper. Motivated by natural self-organizing systems, the presented approach of fast and collective evasion enables the UAV swarm to avoid dynamic objects (interferers) that are actively approaching the group. The main objective of the proposed technique is the fast and safe escape of the swarm from an interferer ~discovered in proximity. This method is inspired by the collective behavior of groups of certain animals, such as schools of fish or flocks of birds. These animals use the limited information of their sensing organs and decentralized control to achieve reliable and effective group motion. The system presented in this paper is intended to execute the safe coordination of UAV swarms with a large number of agents. Similar to natural swarms, this system propagates a fast shock of information about detected interferers throughout the group to achieve dynamic and collective evasion. The proposed system is fully decentralized using only onboard sensors to mutually localize swarm agents and interferers, similar to how animals accomplish this behavior. As a result, the communication structure between swarm agents is not overwhelmed by information about the state (position and velocity) of each individual and it is reliable to communication dropouts. The proposed system and theory were numerically evaluated and verified in real-world experiments.
Towards UAV-USV Collaboration in Harsh Maritime Conditions Including Large Waves
Aug 19, 2024This paper introduces a system designed for tight collaboration between Unmanned Aerial Vehicles (UAVs) and Unmanned Surface Vehicles (USVs) in harsh maritime conditions characterized by large waves. This onboard UAV system aims to enhance collaboration with USVs for following and landing tasks under such challenging conditions. The main contribution of our system is the novel mathematical USV model, describing the movement of the USV in 6 degrees of freedom on a wavy water surface, which is used to estimate and predict USV states. The estimator fuses data from multiple global and onboard sensors, ensuring accurate USV state estimation. The predictor computes future USV states using the novel mathematical USV model and the last estimated states. The estimated and predicted USV states are forwarded into a trajectory planner that generates a UAV trajectory for following the USV or landing on its deck, even in harsh environmental conditions. The proposed approach was verified in numerous simulations and deployed to the real world, where the UAV was able to follow the USV and land on its deck repeatedly.
Collaborative Object Manipulation on the Water Surface by a UAV-USV Team Using Tethers
Jul 11, 2024This paper introduces an innovative methodology for object manipulation on the surface of water through the collaboration of an Unmanned Aerial Vehicle (UAV) and an Unmanned Surface Vehicle (USV) connected to the object by tethers. We propose a novel mathematical model of a robotic system that combines the UAV, USV, and the tethered floating object. A novel Model Predictive Control (MPC) framework is designed for using this model to achieve precise control and guidance for this collaborative robotic system. Extensive simulations in the realistic robotic simulator Gazebo demonstrate the system's readiness for real-world deployment, highlighting its versatility and effectiveness. Our multi-robot system overcomes the state-of-the-art single-robot approach, exhibiting smaller control errors during the tracking of the floating object's reference. Additionally, our multi-robot system demonstrates a shorter recovery time from a disturbance compared to the single-robot approach.
Towards Safe Mid-Air Drone Interception: Strategies for Tracking & Capture
May 22, 2024A unique approach for the mid-air autonomous aerial interception of non-cooperating UAV by a flying robot equipped with a net is presented in this paper. A novel interception guidance method dubbed EPN is proposed, designed to catch agile maneuvering targets while relying on onboard state estimation and tracking. The proposed method is compared with state-of-the-art approaches in simulations using 100 different trajectories of the target with varying complexity comprising almost 14 hours of flight data, and EPN demonstrates the shortest response time and the highest number of interceptions, which are key parameters of agile interception. To enable robust transfer from theory and simulation to a real-world implementation, we aim to avoid overfitting to specific assumptions about the target, and to tackle interception of a target following an unknown general trajectory. Furthermore, we identify several often overlooked problems related to tracking and estimation of the target's state that can have a significant influence on the overall performance of the system. We propose the use of a novel state estimation filter based on the IMM filter and a new measurement model. Simulated experiments show that the proposed solution provides significant improvements in estimation accuracy over the commonly employed KF approaches when considering general trajectories. Based on these results, we employ the proposed filtering and guidance methods to implement a complete autonomous interception system, which is thoroughly evaluated in realistic simulations and tested in real-world experiments with a maneuvering target going far beyond the performance of any state-of-the-art solution.