 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Safe Mid-Air Drone Interception: Strategies for Tracking & Capture
Paper and Code
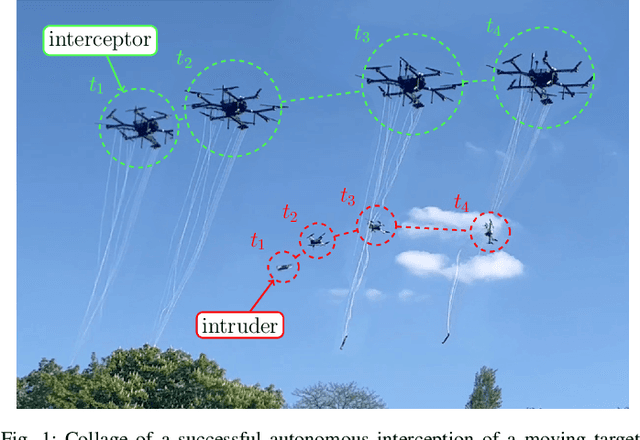
A unique approach for the mid-air autonomous aerial interception of non-cooperating UAV by a flying robot equipped with a net is presented in this paper. A novel interception guidance method dubbed EPN is proposed, designed to catch agile maneuvering targets while relying on onboard state estimation and tracking. The proposed method is compared with state-of-the-art approaches in simulations using 100 different trajectories of the target with varying complexity comprising almost 14 hours of flight data, and EPN demonstrates the shortest response time and the highest number of interceptions, which are key parameters of agile interception. To enable robust transfer from theory and simulation to a real-world implementation, we aim to avoid overfitting to specific assumptions about the target, and to tackle interception of a target following an unknown general trajectory. Furthermore, we identify several often overlooked problems related to tracking and estimation of the target's state that can have a significant influence on the overall performance of the system. We propose the use of a novel state estimation filter based on the IMM filter and a new measurement model. Simulated experiments show that the proposed solution provides significant improvements in estimation accuracy over the commonly employed KF approaches when considering general trajectories. Based on these results, we employ the proposed filtering and guidance methods to implement a complete autonomous interception system, which is thoroughly evaluated in realistic simulations and tested in real-world experiments with a maneuvering target going far beyond the performance of any state-of-the-art solution.