 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarming in the Wild: A Distributed Communication-less Lloyd-based Algorithm dealing with Uncertainties
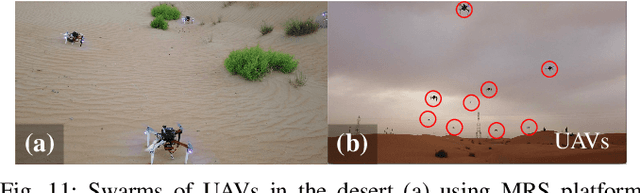
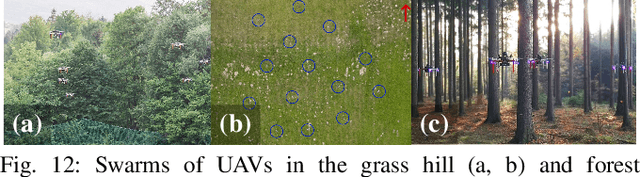
Apr 26, 2025In this work, we present a distributed algorithm for swarming in complex environments that operates with no communication, no a priori information about the environment, and using only onboard sensing and computation capabilities. We provide sufficient conditions to guarantee that each robot reaches its goal region in a finite time, avoiding collisions with obstacles and other robots without exceeding a desired maximum distance from a predefined set of neighbors (flocking constraint). In addition, we show how the proposed algorithm can deal with tracking errors and onboard sensing errors without violating safety and proximity constraints, still providing the conditions for having convergence towards the goal region. To validate the approach, we provide experiments in the field. We tested our algorithm in GNSS-denied environments i.e., a dense forest, where fully autonomous aerial robots swarmed safely to the desired destinations, by relying only on onboard sensors, i.e., without a communication network. This work marks the initial deployment of a fully distributed system where there is no communication between the robots, nor reliance on any global localization system, which at the same time it ensures safety and convergence towards the goal within such complex environments.
Towards Agile Swarming in Real World: Onboard Relative Localization with Fast Tracking of Active Blinking Markers
Feb 03, 2025A novel onboard tracking approach enabling vision-based relative localization and communication using Active blinking Marker Tracking (AMT) is introduced in this article. Active blinking markers on multi-robot team members improve the robustness of relative localization for aerial vehicles in tightly coupled swarms during real-world deployments, while also serving as a resilient communication channel. Traditional tracking algorithms struggle to track fast moving blinking markers due to their intermittent appearance in the camera frames. AMT addresses this by using weighted polynomial regression to predict the future appearance of active blinking markers while accounting for uncertainty in the prediction. In outdoor experiments, the AMT approach outperformed state-of-the-art methods in tracking density, accuracy, and complexity. The experimental validation of this novel tracking approach for relative localization involved testing motion patterns motivated by our research on agile multi-robot deployment.
Fast Collective Evasion in Self-Localized Swarms of Unmanned Aerial Vehicles
Aug 20, 2024A novel approach for achieving fast evasion in self-localized swarms of Unmanned Aerial Vehicles (UAVs) threatened by an intruding moving object is presented in this paper. Motivated by natural self-organizing systems, the presented approach of fast and collective evasion enables the UAV swarm to avoid dynamic objects (interferers) that are actively approaching the group. The main objective of the proposed technique is the fast and safe escape of the swarm from an interferer ~discovered in proximity. This method is inspired by the collective behavior of groups of certain animals, such as schools of fish or flocks of birds. These animals use the limited information of their sensing organs and decentralized control to achieve reliable and effective group motion. The system presented in this paper is intended to execute the safe coordination of UAV swarms with a large number of agents. Similar to natural swarms, this system propagates a fast shock of information about detected interferers throughout the group to achieve dynamic and collective evasion. The proposed system is fully decentralized using only onboard sensors to mutually localize swarm agents and interferers, similar to how animals accomplish this behavior. As a result, the communication structure between swarm agents is not overwhelmed by information about the state (position and velocity) of each individual and it is reliable to communication dropouts. The proposed system and theory were numerically evaluated and verified in real-world experiments.
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.
Distributed formation-enforcing control for UAVs robust to observation noise in relative pose measurements
Apr 06, 2023



A technique that allows a formation-enforcing control (FEC) derived from graph rigidity theory to interface with a realistic relative localization system is proposed in this paper. Recent research in sensor-based multi-robot control has given rise to multiple modalities of mutual relative localization systems. In particular, vision-based relative localization has reached the stage where it can be carried onboard lightweight UAVs in order to retrieve the relative positions and relative orientations of cooperating units. A separate stream of development spawned distributed formation-enforcing control which can lead individual robots into a desired formation using relative localization of their neighbors. These two fields naturally complement each other by achieving real-world flights of UAVs in formation without the need for absolute localization in the world. However, real relative localization systems are, without exception, burdened by non-negligible sensory noise, which is typically not fully taken into account in formation-enforcing control algorithms. Such noise can lead to rapid changes in velocity, which further interferes with visual localization. Our approach provides a solution to these challenges, enabling practical deployment of FEC under realistic conditions, as we demonstrated in real-world experiments.
On Onboard LiDAR-based Flying Object Detection
Mar 09, 2023



A new robust and accurate approach for the detection and localization of flying objects with the purpose of highly dynamic aerial interception and agile multi-robot interaction is presented in this paper. The approach is proposed for use onboard an autonomous aerial vehicle equipped with a 3D LiDAR sensor providing input data for the algorithm. It relies on a novel 3D occupancy voxel mapping method for the target detection and a cluster-based multiple hypothesis tracker to compensate uncertainty of the sensory data. When compared to state-of-the-art methods of onboard detection of other flying objects, the presented approach provides superior localization accuracy and robustness to different environments and appearance changes of the target, as well as a greater detection range. Furthermore, in combination with the proposed multi-target tracker, sporadic false positives are suppressed, state estimation of the target is provided and the detection latency is negligible. This makes the detector suitable for tasks of agile multi-robot interaction, such as autonomous aerial interception or formation control where precise, robust, and fast relative localization of other robots is crucial. We demonstrate the practical usability and performance of the system in simulated and real-world experiments.
Bio-Inspired Compact Swarms of Unmanned Aerial Vehicles without Communication and External Localization
Mar 06, 2023This article presents a unique framework for deploying decentralized and infrastructure-independent swarms of homogeneous aerial vehicles in the real world without explicit communication. This is a requirement in swarm research, which anticipates that global knowledge and communication will not scale well with the number of robots. The system architecture proposed in this article employs the UVDAR technique to directly perceive the local neighborhood for direct mutual localization of swarm members. The technique allows for decentralization and high scalability of swarm systems, such as can be observed in fish schools, bird flocks, or cattle herds. The bio-inspired swarming model that has been developed is suited for real-world deployment of large particle groups in outdoor and indoor environments with obstacles. The collective behavior of the model emerges from a set of local rules based on direct observation of the neighborhood using onboard sensors only. The model is scalable, requires only local perception of agents and the environment, and requires no communication among the agents. Apart from simulated scenarios, the performance and usability of the entire framework is analyzed in several real-world experiments with a fully-decentralized swarm of UAVs deployed in outdoor conditions. To the best of our knowledge, these experiments are the first deployment of decentralized bio-inspired compact swarms of UAVs without the use of a communication network or shared absolute localization. The entire system is available as open-source at https://github.com/ctu-mrs.
Optical communication-based identification for multi-UAV systems: theory and practice
Feb 09, 2023
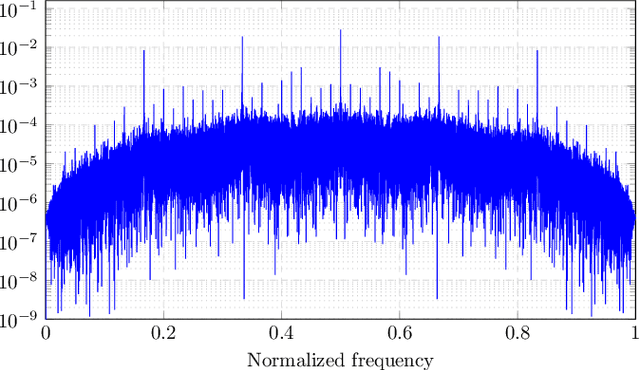
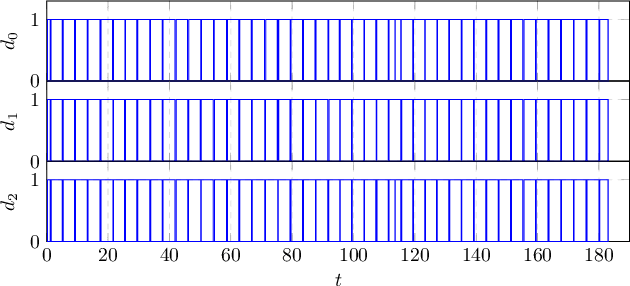
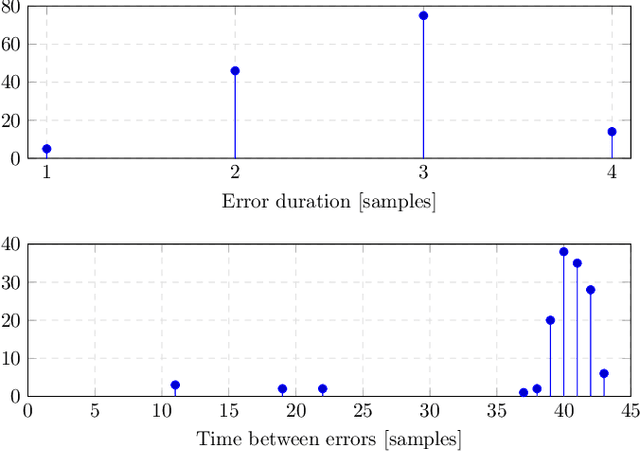
Mutual relative localization and identification is an important feature for the stabilization and navigation of multi-Unmanned Aerial Vehicle (UAV) systems. Camera-based communications technology, also referred to as Optical Camera Communications (OCC) in the literature, is a novel approach that could bring a valuable solution to such a complex task. In such system, the UAVs are equipped with LEDs that act as beacons and with cameras allowing them to locate the LEDs of other UAVs. Specific blinking sequences are assigned to the LEDs of each of the UAVs in order to uniquely identify them. This camera-based relative localization and identification system is immune to Radio Frequency (RF) electromagnetic interference and operates in Global Navigation satellite (GNSS) denied environments. In addition, since many UAVs are already equipped with cameras, the implementation of this system is inexpensive. In this article, we study in detail the capacity of this system and its limitations. Furthermore, we show how to construct blinking sequences for UAV LEDs in order to improve system performance. Finally, experimental results are presented to corroborate the analytical derivations.
MRS Modular UAV Hardware Platforms for Supporting Research in Real-World Outdoor and Indoor Environments
Feb 09, 2023
This paper presents a family of autonomous Unmanned Aerial Vehicles (UAVs) platforms designed for a diverse range of indoor and outdoor applications. The proposed UAV design is highly modular in terms of used actuators, sensor configurations, and even UAV frames. This allows to achieve, with minimal effort, a proper experimental setup for single, as well as, multi robot scenarios. Presented platforms are intended to facilitate the transition from simulations, and simplified laboratory experiments, into the deployment of aerial robots into uncertain and hard-to-model real-world conditions. We present mechanical designs, electric configurations, and dynamic models of the UAVs, followed by numerous recommendations and technical details required for building such a fully autonomous UAV system for experimental verification of scientific achievements. To show strength and high variability of the proposed system, we present results of tens of completely different real-robot experiments in various environments using distinct actuator and sensory configurations.
* 10 pages, 17 figures, conference
Design and Deployment of an Autonomous Unmanned Ground Vehicle for Urban Firefighting Scenarios
Jul 08, 2021
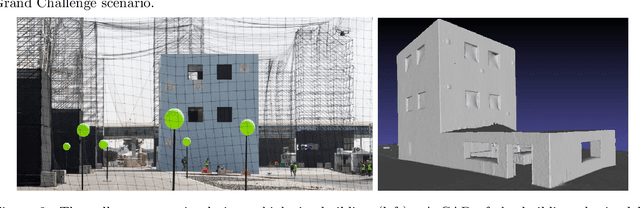
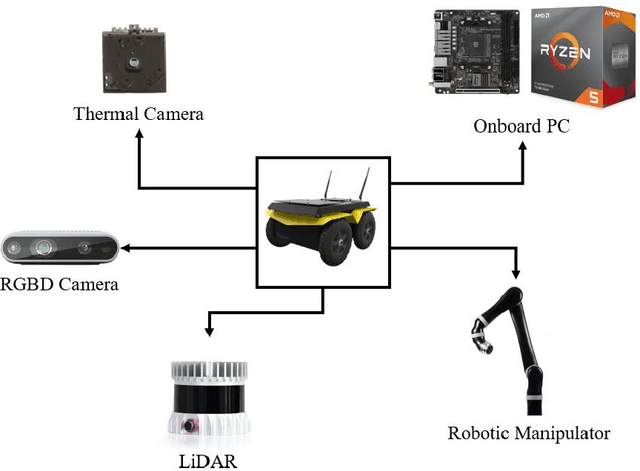
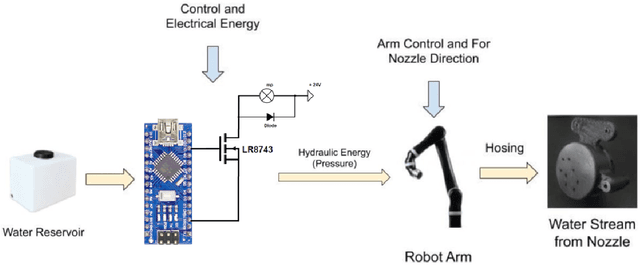
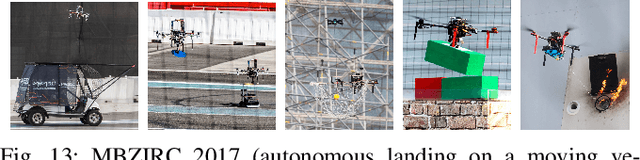
Autonomous mobile robots have the potential to solve missions that are either too complex or dangerous to be accomplished by humans. In this paper, we address the design and autonomous deployment of a ground vehicle equipped with a robotic arm for urban firefighting scenarios. We describe the hardware design and algorithm approaches for autonomous navigation, planning, fire source identification and abatement in unstructured urban scenarios. The approach employs on-board sensors for autonomous navigation and thermal camera information for source identification. A custom electro{mechanical pump is responsible to eject water for fire abatement. The proposed approach is validated through several experiments, where we show the ability to identify and abate a sample heat source in a building. The whole system was developed and deployed during the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020, for Challenge No. 3 Fire Fighting Inside a High-Rise Building and during the Grand Challenge where our approach scored the highest number of points among all UGV solutions and was instrumental to win the first place.