 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRMS: Redundancy-Minimizing Point Cloud Sampling for Real-Time Pose Estimation in Degenerated Environments
Dec 12, 2023

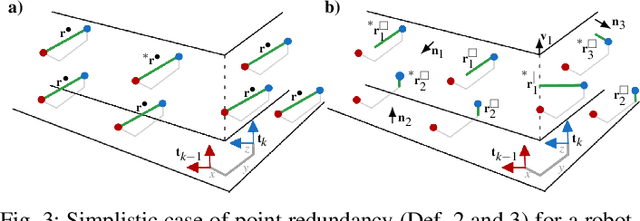

The typical point cloud sampling methods used in state estimation for mobile robots preserve a high level of point redundancy. The point redundancy slows down the estimation pipeline and can make real-time estimation drift in geometrically symmetrical and structureless environments. We propose a novel point cloud sampling method that is capable of lowering the effects of geometrical degeneracies by minimizing redundancy within the cloud. The proposed method is an alternative to the commonly used sparsification methods that normalize the density of points to comply with the constraints on the real-time capabilities of a robot. In contrast to density normalization, our method builds on the fact that linear and planar surfaces contain a high level of redundancy propagated into iterative estimation pipelines. We define the concept of gradient flow quantifying the surface underlying a point. We also show that maximizing the entropy of the gradient flow minimizes point redundancy for robot ego-motion estimation. We integrate the proposed method into the point-based KISS-ICP and feature-based LOAM odometry pipelines and evaluate it experimentally on KITTI, Hilti-Oxford, and custom datasets from multirotor UAVs. The experiments show that the proposed sampling technique outperforms state-of-the-art methods in well-conditioned as well as in geometrically-degenerated settings, in both accuracy and speed.
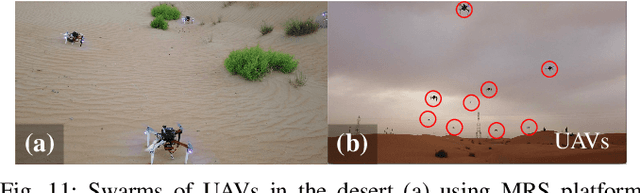
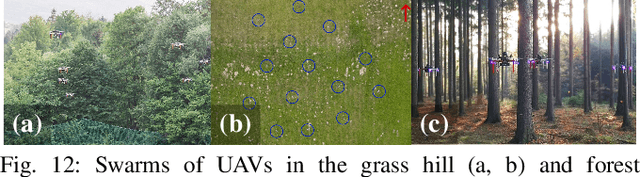
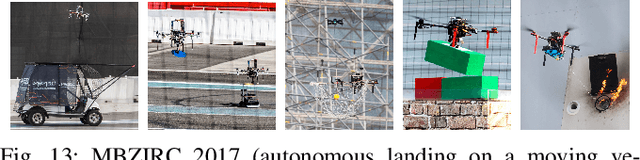
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.
New Era in Cultural Heritage Preservation: Cooperative Aerial Autonomy
Mar 06, 2023



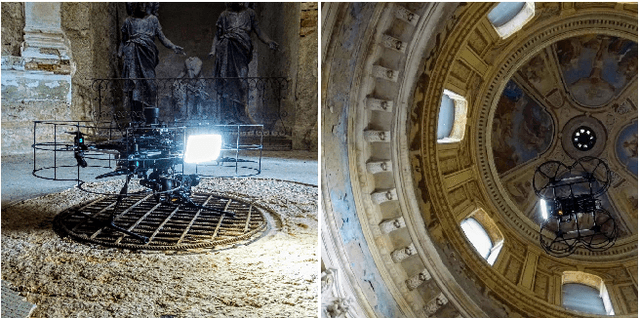
Digital documentation of large interiors of historical buildings is an exhausting task since most of the areas of interest are beyond typical human reach. We advocate the use of autonomous teams of multi-rotor Unmanned Aerial Vehicles (UAVs) to speed up the documentation process by several orders of magnitude while allowing for a repeatable, accurate, and condition-independent solution capable of precise collision-free operation at great heights. The proposed multi-robot approach allows for performing tasks requiring dynamic scene illumination in large-scale real-world scenarios, a process previously applicable only in small-scale laboratory-like conditions. Extensive experimental analyses range from single-UAV imaging to specialized lighting techniques requiring accurate coordination of multiple UAVs. The system's robustness is demonstrated in more than two hundred autonomous flights in fifteen historical monuments requiring superior safety while lacking access to external localization. This unique experimental campaign, cooperated with restorers and conservators, brought numerous lessons transferable to other safety-critical robotic missions in documentation and inspection tasks.
* Published as Early Access on February 28, 2023. Supported by multimedia available at http://mrs.felk.cvut.cz/ram2022dronument
Bio-Inspired Compact Swarms of Unmanned Aerial Vehicles without Communication and External Localization
Mar 06, 2023This article presents a unique framework for deploying decentralized and infrastructure-independent swarms of homogeneous aerial vehicles in the real world without explicit communication. This is a requirement in swarm research, which anticipates that global knowledge and communication will not scale well with the number of robots. The system architecture proposed in this article employs the UVDAR technique to directly perceive the local neighborhood for direct mutual localization of swarm members. The technique allows for decentralization and high scalability of swarm systems, such as can be observed in fish schools, bird flocks, or cattle herds. The bio-inspired swarming model that has been developed is suited for real-world deployment of large particle groups in outdoor and indoor environments with obstacles. The collective behavior of the model emerges from a set of local rules based on direct observation of the neighborhood using onboard sensors only. The model is scalable, requires only local perception of agents and the environment, and requires no communication among the agents. Apart from simulated scenarios, the performance and usability of the entire framework is analyzed in several real-world experiments with a fully-decentralized swarm of UAVs deployed in outdoor conditions. To the best of our knowledge, these experiments are the first deployment of decentralized bio-inspired compact swarms of UAVs without the use of a communication network or shared absolute localization. The entire system is available as open-source at https://github.com/ctu-mrs.
Dronument: System for Reliable Deployment of Micro Aerial Vehicles in Dark Areas of Large Historical Monuments
Mar 06, 2023


This letter presents a self-contained system for robust deployment of autonomous aerial vehicles in environments without access to global navigation systems and with limited lighting conditions. The proposed system, application-tailored for documentation in dark areas of large historical monuments, uses a unique and reliable aerial platform with a multi-modal lightweight sensory setup to acquire data in human-restricted areas with adverse lighting conditions, especially in areas that are high above the ground. The introduced localization method relies on an easy-to-obtain 3-D point cloud of a historical building, while it copes with a lack of visible light by fusing active laser-based sensors. The approach does not rely on any external localization, or on a preset motion-capture system. This enables fast deployment in the interiors of investigated structures while being computationally undemanding enough to process data online, onboard an MAV equipped with ordinary processing resources. The reliability of the system is analyzed, is quantitatively evaluated on a set of aerial trajectories performed inside a real-world church, and is deployed onto the aerial platform in the position control feedback loop to demonstrate the reliability of the system in the safety-critical application of historical monuments documentation.
Large-Scale Exploration of Cave Environments by Unmanned Aerial Vehicles
Mar 06, 2023
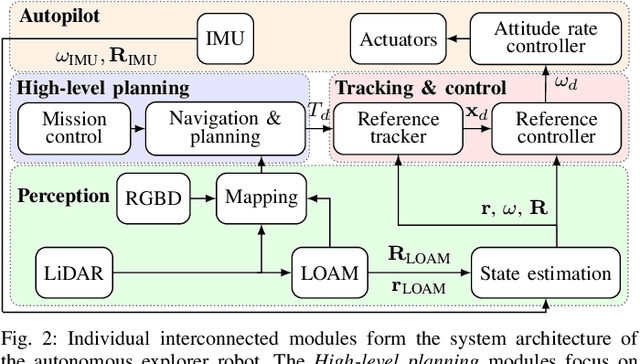

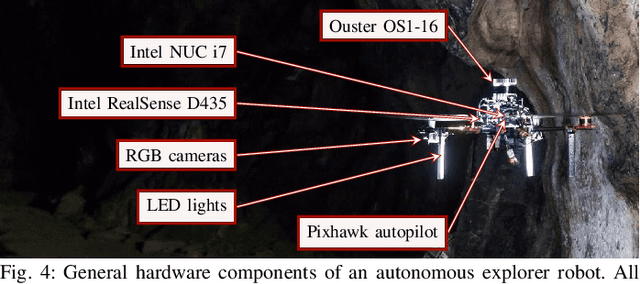
This paper presents a self-contained system for the robust utilization of aerial robots in the autonomous exploration of cave environments to help human explorers, first responders, and speleologists. The proposed system is generally applicable to an arbitrary exploration task within an unknown and unstructured subterranean environment and interconnects crucial robotic subsystems to provide full autonomy of the robots. Such subsystems primarily include mapping, path and trajectory planning, localization, control, and decision making. Due to the diversity, complexity, and structural uncertainty of natural cave environments, the proposed system allows for the possible use of any arbitrary exploration strategy for a single robot, as well as for a cooperating team. A multi-robot cooperation strategy that maximizes the limited flight time of each aerial robot is proposed for exploration and search & rescue scenarios where the homing of all deployed robots back to an initial location is not required The entire system is validated in a comprehensive experimental analysis comprising of hours of flight time in a real-world cave environment, as well as by hundreds of hours within a state-of-the-art virtual testbed that was developed for the DARPA Subterranean Challenge robotic competition. Among others, experimental results include multiple real-world exploration flights traveling over 470 meters on a single battery in a demanding unknown cave environment.
MRS Modular UAV Hardware Platforms for Supporting Research in Real-World Outdoor and Indoor Environments
Feb 09, 2023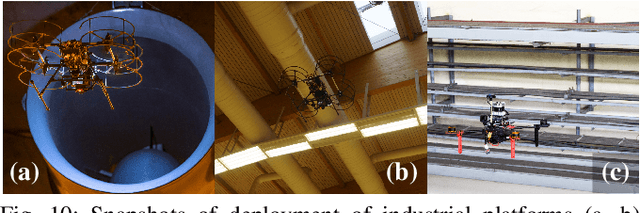
This paper presents a family of autonomous Unmanned Aerial Vehicles (UAVs) platforms designed for a diverse range of indoor and outdoor applications. The proposed UAV design is highly modular in terms of used actuators, sensor configurations, and even UAV frames. This allows to achieve, with minimal effort, a proper experimental setup for single, as well as, multi robot scenarios. Presented platforms are intended to facilitate the transition from simulations, and simplified laboratory experiments, into the deployment of aerial robots into uncertain and hard-to-model real-world conditions. We present mechanical designs, electric configurations, and dynamic models of the UAVs, followed by numerous recommendations and technical details required for building such a fully autonomous UAV system for experimental verification of scientific achievements. To show strength and high variability of the proposed system, we present results of tens of completely different real-robot experiments in various environments using distinct actuator and sensory configurations.
* 10 pages, 17 figures, conference
UAVs Beneath the Surface: Cooperative Autonomy for Subterranean Search and Rescue in DARPA SubT
Jun 16, 2022

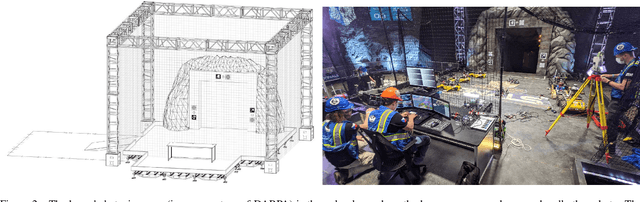

This paper presents a novel approach for autonomous cooperating UAVs in search and rescue operations in subterranean domains with complex topology. The proposed system was ranked second in the Virtual Track of the DARPA SubT Finals as part of the team CTU-CRAS-NORLAB. In contrast to the winning solution that was developed specifically for the Virtual Track, the proposed solution also proved to be a robust system for deployment onboard physical UAVs flying in the extremely harsh and confined environment of the real-world competition. The proposed approach enables fully autonomous and decentralized deployment of a UAV team with seamless simulation-to-world transfer, and proves its advantage over less mobile UGV teams in the flyable space of diverse environments. The main contributions of the paper are present in the mapping and navigation pipelines. The mapping approach employs novel map representations -- SphereMap for efficient risk-aware long-distance planning, FacetMap for surface coverage, and the compressed topological-volumetric LTVMap for allowing multi-robot cooperation under low-bandwidth communication. These representations are used in navigation together with novel methods for visibility-constrained informed search in a general 3D environment with no assumptions about the environment structure, while balancing deep exploration with sensor-coverage exploitation. The proposed solution also includes a visual-perception pipeline for on-board detection and localization of objects of interest in four RGB stream at 5 Hz each without a dedicated GPU. Apart from participation in the DARPA SubT, the performance of the UAV system is supported by extensive experimental verification in diverse environments with both qualitative and quantitative evaluation.