 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRMS: Redundancy-Minimizing Point Cloud Sampling for Real-Time Pose Estimation in Degenerated Environments
Paper and Code


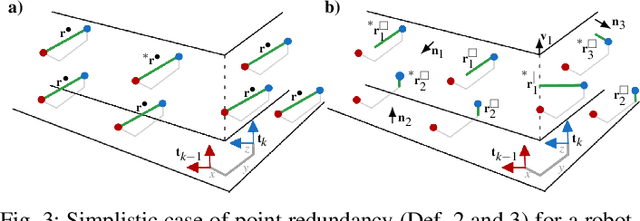

The typical point cloud sampling methods used in state estimation for mobile robots preserve a high level of point redundancy. The point redundancy slows down the estimation pipeline and can make real-time estimation drift in geometrically symmetrical and structureless environments. We propose a novel point cloud sampling method that is capable of lowering the effects of geometrical degeneracies by minimizing redundancy within the cloud. The proposed method is an alternative to the commonly used sparsification methods that normalize the density of points to comply with the constraints on the real-time capabilities of a robot. In contrast to density normalization, our method builds on the fact that linear and planar surfaces contain a high level of redundancy propagated into iterative estimation pipelines. We define the concept of gradient flow quantifying the surface underlying a point. We also show that maximizing the entropy of the gradient flow minimizes point redundancy for robot ego-motion estimation. We integrate the proposed method into the point-based KISS-ICP and feature-based LOAM odometry pipelines and evaluate it experimentally on KITTI, Hilti-Oxford, and custom datasets from multirotor UAVs. The experiments show that the proposed sampling technique outperforms state-of-the-art methods in well-conditioned as well as in geometrically-degenerated settings, in both accuracy and speed.