 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDronument: System for Reliable Deployment of Micro Aerial Vehicles in Dark Areas of Large Historical Monuments
Paper and Code
Mar 06, 2023
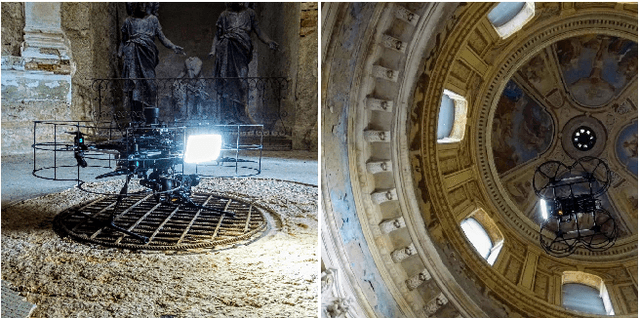


This letter presents a self-contained system for robust deployment of autonomous aerial vehicles in environments without access to global navigation systems and with limited lighting conditions. The proposed system, application-tailored for documentation in dark areas of large historical monuments, uses a unique and reliable aerial platform with a multi-modal lightweight sensory setup to acquire data in human-restricted areas with adverse lighting conditions, especially in areas that are high above the ground. The introduced localization method relies on an easy-to-obtain 3-D point cloud of a historical building, while it copes with a lack of visible light by fusing active laser-based sensors. The approach does not rely on any external localization, or on a preset motion-capture system. This enables fast deployment in the interiors of investigated structures while being computationally undemanding enough to process data online, onboard an MAV equipped with ordinary processing resources. The reliability of the system is analyzed, is quantitatively evaluated on a set of aerial trajectories performed inside a real-world church, and is deployed onto the aerial platform in the position control feedback loop to demonstrate the reliability of the system in the safety-critical application of historical monuments documentation.