 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating online elasticity estimation of soft objects using standard robot grippers
Jan 16, 2024Standard robot grippers are not designed for elasticity estimation. In this work, a professional biaxial compression device was used as a control setup to study the accuracy with which material properties can be estimated by two standard parallel jaw grippers and a force/torque sensor mounted at the robot wrist. Using three sets of deformable objects, different parameters were varied to observe their effect on measuring material characteristics: (1) repeated compression cycles, (2) compression speed, and (3) the surface area of the gripper jaws. Gripper effort versus position curves were obtained and transformed into stress/strain curves. The modulus of elasticity was estimated at different strain points. Viscoelasticity was assessed using the energy absorbed in a compression/decompression cycle, the Kelvin-Voigt, and Hunt-Crossley models. Our results can be summarized as follows: (1) better results were obtained with slower compression speeds, while additional compression cycles or surface area did not improve estimation; (2) the robot grippers, even after calibration, were found to have a limited capability of delivering accurate estimates of absolute values of Young's modulus and viscoelasticity; (3) relative ordering of material characteristics was largely consistent across different grippers; (4) despite the nonlinear characteristics of deformable objects, fitting linear stress/strain approximations led to more stable results than local estimates of Young's modulus; (5) to assess viscoelasticity, the Hunt-Crossley model worked best. Finally, we show that a two-dimensional space representing elasticity and viscoelasticity estimates is advantageous for the discrimination of deformable objects. A single-grasp, online, classification and sorting of such objects is thus possible. An additional contribution is the dataset and data processing codes that we make publicly available.
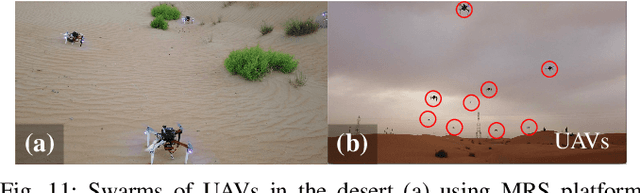
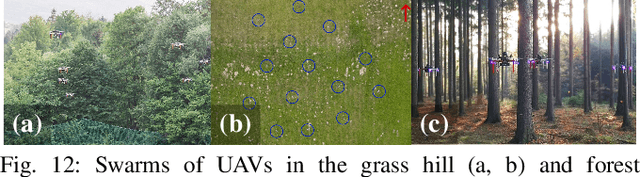
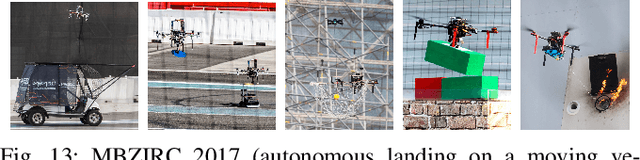
MRS Drone: A Modular Platform for Real-World Deployment of Aerial Multi-Robot Systems
Jun 12, 2023This paper presents a modular autonomous Unmanned Aerial Vehicle (UAV) platform called the Multi-robot Systems (MRS) Drone that can be used in a large range of indoor and outdoor applications. The MRS Drone features unique modularity with respect to changes in actuators, frames, and sensory configuration. As the name suggests, the platform is specially tailored for deployment within a MRS group. The MRS Drone contributes to the state-of-the-art of UAV platforms by allowing smooth real-world deployment of multiple aerial robots, as well as by outperforming other platforms with its modularity. For real-world multi-robot deployment in various applications, the platform is easy to both assemble and modify. Moreover, it is accompanied by a realistic simulator to enable safe pre-flight testing and a smooth transition to complex real-world experiments. In this manuscript, we present mechanical and electrical designs, software architecture, and technical specifications to build a fully autonomous multi UAV system. Finally, we demonstrate the full capabilities and the unique modularity of the MRS Drone in various real-world applications that required a diverse range of platform configurations.
MRS Modular UAV Hardware Platforms for Supporting Research in Real-World Outdoor and Indoor Environments
Feb 09, 2023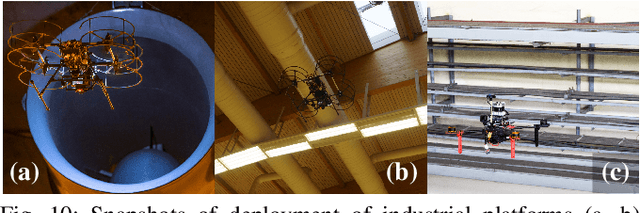
This paper presents a family of autonomous Unmanned Aerial Vehicles (UAVs) platforms designed for a diverse range of indoor and outdoor applications. The proposed UAV design is highly modular in terms of used actuators, sensor configurations, and even UAV frames. This allows to achieve, with minimal effort, a proper experimental setup for single, as well as, multi robot scenarios. Presented platforms are intended to facilitate the transition from simulations, and simplified laboratory experiments, into the deployment of aerial robots into uncertain and hard-to-model real-world conditions. We present mechanical designs, electric configurations, and dynamic models of the UAVs, followed by numerous recommendations and technical details required for building such a fully autonomous UAV system for experimental verification of scientific achievements. To show strength and high variability of the proposed system, we present results of tens of completely different real-robot experiments in various environments using distinct actuator and sensory configurations.
* 10 pages, 17 figures, conference
Single-grasp deformable object discrimination: the effect of gripper morphology, sensing modalities, and action parameters
Apr 13, 2022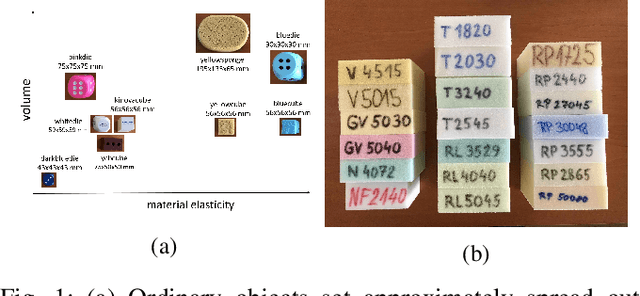
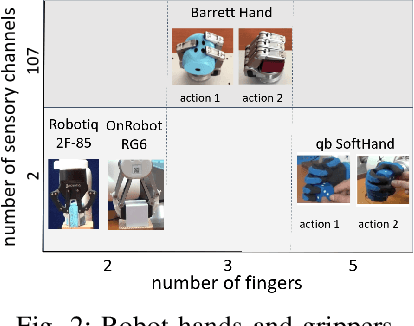
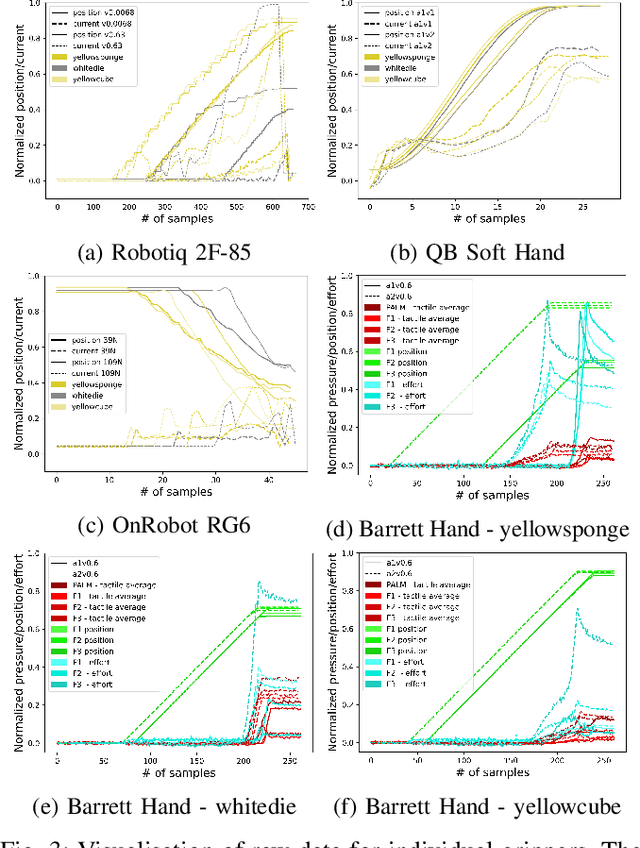
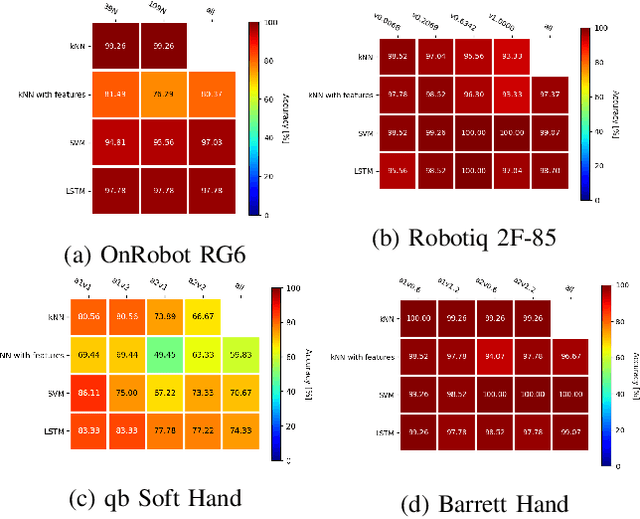
We studied the discrimination of deformable objects by grasping them using 4 different robot hands / grippers: Barrett hand (3 fingers with adjustable configuration, 96 tactile, 8 position, 3 torque sensors), qb SoftHand (5 fingers, 1 motor, position and current feedback), and two industrial type parallel jaw grippers with position and effort feedback (Robotiq 2F-85 and OnRobot RG6). A set of 9 ordinary objects differing in size and stiffness and another highly challenging set of 20 polyurethane foams differing in material properties only was used. We systematically compare the grippers' performance, together with the effects of: (1) type of classifier (k-NN, SVM, LSTM) operating on raw time series or on features, (2) action parameters (grasping configuration and speed of squeezing), (3) contribution of sensory modalities. Classification results are complemented by visualization of the data using PCA. We found: (i) all the grippers but the qb SoftHand could reliably distinguish the ordinary objects set; (ii) Barrett Hand reached around 95% accuracy on the foams; OnRobot RG6 around 75% and Robotiq 2F-85 around 70%; (iii) across all grippers, SVM over features and LSTM on raw time series performed best; (iv) faster compression speeds degrade classification performance; (v) transfer learning between compression speeds worked well for the Barrett Hand only; transfer between grasping configurations is limited; (vi) ablation experiments provided intriguing insights -- sometimes a single sensory channel suffices for discrimination. Overall, the Barrett Hand as a complex and expensive device with rich sensory feedback provided best results, but uncalibrated parallel jaw grippers without tactile sensors can have sufficient performance for single-grasp object discrimination based on position and effort data only. Transfer learning between the different robot hands remains a challenge.