 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-grasp deformable object discrimination: the effect of gripper morphology, sensing modalities, and action parameters
Apr 13, 2022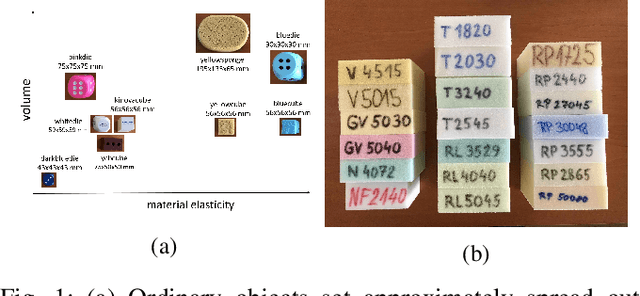
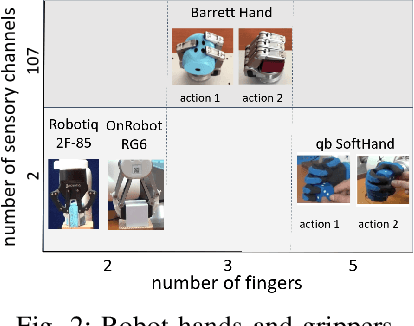
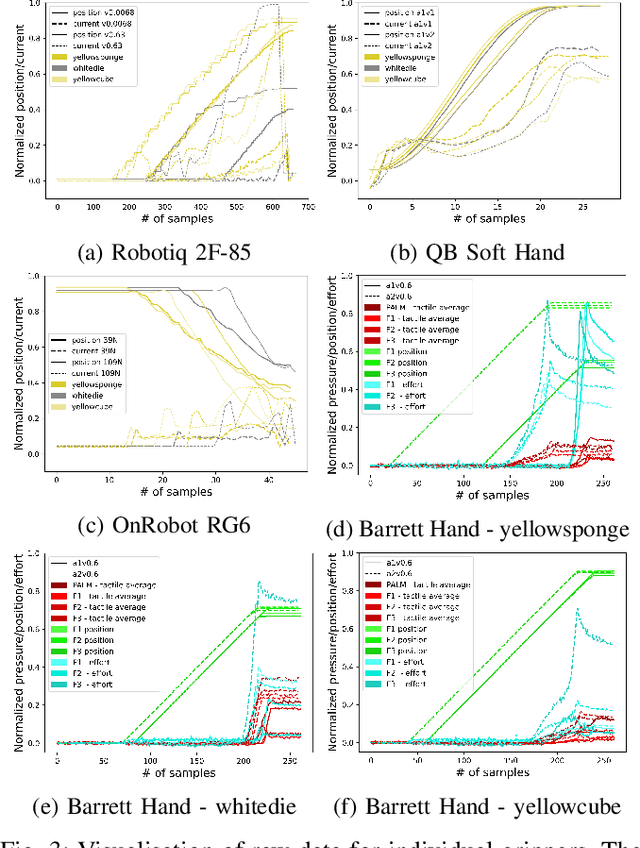
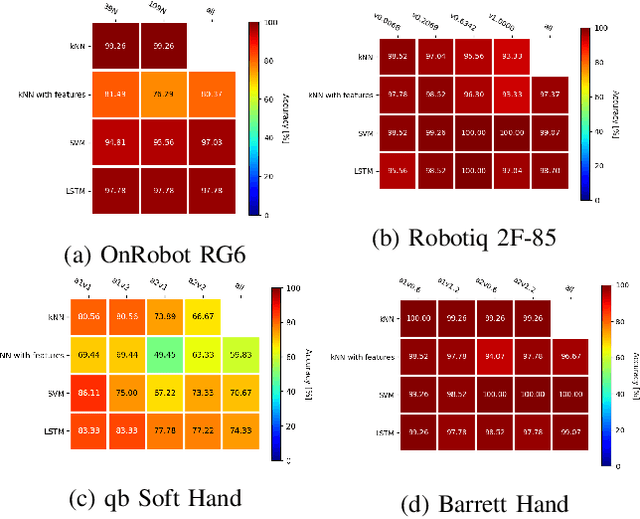
We studied the discrimination of deformable objects by grasping them using 4 different robot hands / grippers: Barrett hand (3 fingers with adjustable configuration, 96 tactile, 8 position, 3 torque sensors), qb SoftHand (5 fingers, 1 motor, position and current feedback), and two industrial type parallel jaw grippers with position and effort feedback (Robotiq 2F-85 and OnRobot RG6). A set of 9 ordinary objects differing in size and stiffness and another highly challenging set of 20 polyurethane foams differing in material properties only was used. We systematically compare the grippers' performance, together with the effects of: (1) type of classifier (k-NN, SVM, LSTM) operating on raw time series or on features, (2) action parameters (grasping configuration and speed of squeezing), (3) contribution of sensory modalities. Classification results are complemented by visualization of the data using PCA. We found: (i) all the grippers but the qb SoftHand could reliably distinguish the ordinary objects set; (ii) Barrett Hand reached around 95% accuracy on the foams; OnRobot RG6 around 75% and Robotiq 2F-85 around 70%; (iii) across all grippers, SVM over features and LSTM on raw time series performed best; (iv) faster compression speeds degrade classification performance; (v) transfer learning between compression speeds worked well for the Barrett Hand only; transfer between grasping configurations is limited; (vi) ablation experiments provided intriguing insights -- sometimes a single sensory channel suffices for discrimination. Overall, the Barrett Hand as a complex and expensive device with rich sensory feedback provided best results, but uncalibrated parallel jaw grippers without tactile sensors can have sufficient performance for single-grasp object discrimination based on position and effort data only. Transfer learning between the different robot hands remains a challenge.