 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Should We Teach Robots? A Comparison of Kinesthetic, Joystick, and Gesture-Based Teaching
May 27, 2026Instructing robots from demonstrations can be done through different teaching modalities, each with different usability and performance trade-offs. This paper compares kinesthetic guidance, joystick teleoperation, and hand gestures in a user study with eight participants. We evaluate replay success, modified NASA-TLX workload, and common teaching errors across three manipulation tasks. Kinesthetic guidance produced the shortest demonstrations, lowest workload, and highest success on the more orientation-sensitive and contact-rich tasks. Joystick teleoperation performed best on simple peg picking. Hand-gesture teaching, although less reliable overall, performed better than expected and in some cases achieved results comparable to kinesthetic guidance.
Learning Compositional Symbolic Task Rules from Demonstrations with Inductive Logic Programming
May 26, 2026Learning from Demonstration~(LfD) should capture not only how a task is executed, but also its high-level task structure that explains the demonstrated behavior. As robots become more autonomous, such task representations must be inspectable, reusable, and human-interpretable. To address this, we study how to represent and learn robotic tasks with inductive logic programming~(ILP) by decomposing a complex task into a series of simpler learning objectives at different abstraction (ontological) levels. The system infers symbolic rules from demonstrations and prior (domain) knowledge, and reuses learned rules when learning higher-level task structure. We evaluate the approach in a synthetic block-assembly scenario and show that the learned abstractions are interpretable and support strong generalization to harder, held-out tasks with unseen objects. These results provide preliminary evidence that decomposed ILP is a feasible approach to task-level LfD.
Learning Transferable Motor Skills for Geometry-Aware Robotic Surface Tasks
May 24, 2026Robotic surface-interaction tasks, such as spray painting or welding, require both accurate geometric planning and precise motion execution. While modern motion planners generate valid geometric paths, they often lack the expert motor patterns observed in human operators. Conversely, learning from demonstration often tightly couples task execution to the specific training geometry, limiting transferability. We propose a modular framework that decouples geometric motion planning from execution-level expertise. Expert behavior is represented as a vocabulary of interpretable, atomic motor rules, such as velocity scaling and orientation offsets, that systematically modify a geometrically planned reference path. We train a multimodal neural network to infer rule parameters jointly from kinematic trajectory data and CAD model geometry. We evaluate our approach through dynamic simulation on L-shaped and window-shaped objects, demonstrating on simulated data that the model successfully extracts velocity and orientation rules across both topologies.
See and Switch: Vision-Based Branching for Interactive Robot-Skill Programming
Mar 09, 2026Programming robots by demonstration (PbD) is an intuitive concept, but scaling it to real-world variability remains a challenge for most current teaching frameworks. Conditional task graphs are very expressive and can be defined incrementally, which fits very well with the PbD idea. However, acting using conditional task graphs requires reliable perception-grounded online branch selection. In this paper, we present See & Switch, an interactive teaching-and-execution framework that represents tasks as user-extendable graphs of skill parts connected via decision states (DS), enabling conditional branching during replay. Unlike prior approaches that rely on manual branching or low-dimensional signals (e.g., proprioception), our vision-based Switcher uses eye-in-hand images (high-dimensional) to select among competing successor skill parts and to detect out-of-distribution contexts that require new demonstrations. We integrate kinesthetic teaching, joystick control, and hand gestures via an input-modality-abstraction layer and demonstrate that our proposed method is teaching modality-independent, enabling efficient in-situ recovery demonstrations. The system is validated in experiments on three challenging dexterous manipulation tasks. We evaluate our method under diverse conditions and furthermore conduct user studies with 8 participants. We show that the proposed method reliably performs branch selection and anomaly detection for novice users, achieving 90.7 % and 87.9 % accuracy, respectively, across 576 real-robot rollouts. We provide all code and data required to reproduce our experiments at http://imitrob.ciirc.cvut.cz/publications/seeandswitch.
TransforMerger: Transformer-based Voice-Gesture Fusion for Robust Human-Robot Communication
Apr 02, 2025



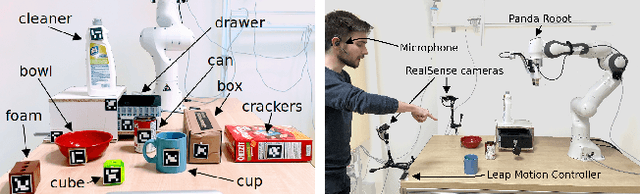
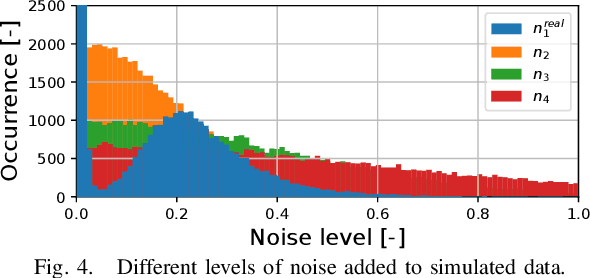
As human-robot collaboration advances, natural and flexible communication methods are essential for effective robot control. Traditional methods relying on a single modality or rigid rules struggle with noisy or misaligned data as well as with object descriptions that do not perfectly fit the predefined object names (e.g. 'Pick that red object'). We introduce TransforMerger, a transformer-based reasoning model that infers a structured action command for robotic manipulation based on fused voice and gesture inputs. Our approach merges multimodal data into a single unified sentence, which is then processed by the language model. We employ probabilistic embeddings to handle uncertainty and we integrate contextual scene understanding to resolve ambiguous references (e.g., gestures pointing to multiple objects or vague verbal cues like "this"). We evaluate TransforMerger in simulated and real-world experiments, demonstrating its robustness to noise, misalignment, and missing information. Our results show that TransforMerger outperforms deterministic baselines, especially in scenarios requiring more contextual knowledge, enabling more robust and flexible human-robot communication. Code and datasets are available at: http://imitrob.ciirc.cvut.cz/publications/transformerger.
MuBlE: MuJoCo and Blender simulation Environment and Benchmark for Task Planning in Robot Manipulation
Mar 04, 2025Current embodied reasoning agents struggle to plan for long-horizon tasks that require to physically interact with the world to obtain the necessary information (e.g. 'sort the objects from lightest to heaviest'). The improvement of the capabilities of such an agent is highly dependent on the availability of relevant training environments. In order to facilitate the development of such systems, we introduce a novel simulation environment (built on top of robosuite) that makes use of the MuJoCo physics engine and high-quality renderer Blender to provide realistic visual observations that are also accurate to the physical state of the scene. It is the first simulator focusing on long-horizon robot manipulation tasks preserving accurate physics modeling. MuBlE can generate mutlimodal data for training and enable design of closed-loop methods through environment interaction on two levels: visual - action loop, and control - physics loop. Together with the simulator, we propose SHOP-VRB2, a new benchmark composed of 10 classes of multi-step reasoning scenarios that require simultaneous visual and physical measurements.
ILeSiA: Interactive Learning of Situational Awareness from Camera Input
Sep 30, 2024Learning from demonstration is a promising way of teaching robots new skills. However, a central problem when executing acquired skills is to recognize risks and failures. This is essential since the demonstrations usually cover only a few mostly successful cases. Inevitable errors during execution require specific reactions that were not apparent in the demonstrations. In this paper, we focus on teaching the robot situational awareness from an initial skill demonstration via kinesthetic teaching and sparse labeling of autonomous skill executions as safe or risky. At runtime, our system, called ILeSiA, detects risks based on the perceived camera images by encoding the images into a low-dimensional latent space representation and training a classifier based on the encoding and the provided labels. In this way, ILeSiA boosts the confidence and safety with which robotic skills can be executed. Our experiments demonstrate that classifiers, trained with only a small amount of user-provided data, can successfully detect numerous risks. The system is flexible because the risk cases are defined by labeling data. This also means that labels can be added as soon as risks are identified by a human supervisor. We provide all code and data required to reproduce our experiments at imitrob.ciirc.cvut.cz/publications/ilesia.
Closed Loop Interactive Embodied Reasoning for Robot Manipulation
Apr 23, 2024Embodied reasoning systems integrate robotic hardware and cognitive processes to perform complex tasks typically in response to a natural language query about a specific physical environment. This usually involves changing the belief about the scene or physically interacting and changing the scene (e.g. 'Sort the objects from lightest to heaviest'). In order to facilitate the development of such systems we introduce a new simulating environment that makes use of MuJoCo physics engine and high-quality renderer Blender to provide realistic visual observations that are also accurate to the physical state of the scene. Together with the simulator we propose a new benchmark composed of 10 classes of multi-step reasoning scenarios that require simultaneous visual and physical measurements. Finally, we develop a new modular Closed Loop Interactive Reasoning (CLIER) approach that takes into account the measurements of non-visual object properties, changes in the scene caused by external disturbances as well as uncertain outcomes of robotic actions. We extensively evaluate our reasoning approach in simulation and in the real world manipulation tasks with a success rate above 76% and 64%, respectively.
Bridging Language, Vision and Action: Multimodal VAEs in Robotic Manipulation Tasks
Apr 02, 2024
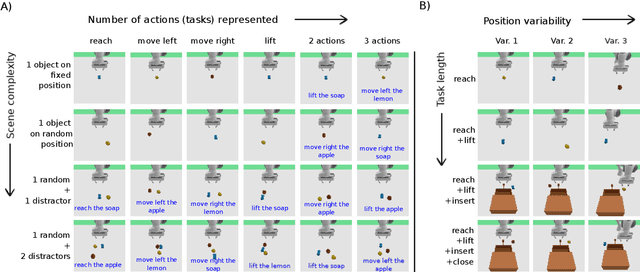

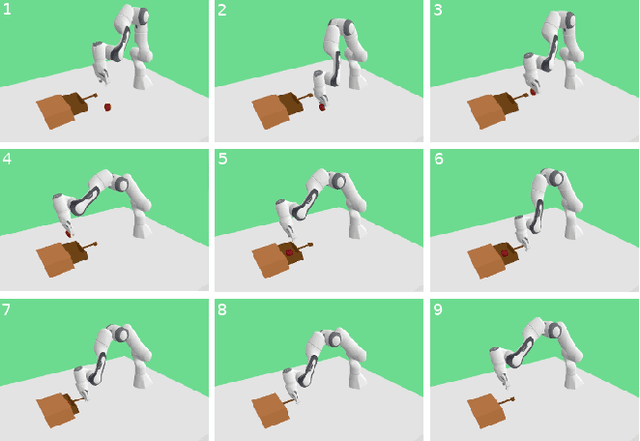
In this work, we focus on unsupervised vision-language-action mapping in the area of robotic manipulation. Recently, multiple approaches employing pre-trained large language and vision models have been proposed for this task. However, they are computationally demanding and require careful fine-tuning of the produced outputs. A more lightweight alternative would be the implementation of multimodal Variational Autoencoders (VAEs) which can extract the latent features of the data and integrate them into a joint representation, as has been demonstrated mostly on image-image or image-text data for the state-of-the-art models. Here we explore whether and how can multimodal VAEs be employed in unsupervised robotic manipulation tasks in a simulated environment. Based on the obtained results, we propose a model-invariant training alternative that improves the models' performance in a simulator by up to 55%. Moreover, we systematically evaluate the challenges raised by the individual tasks such as object or robot position variability, number of distractors or the task length. Our work thus also sheds light on the potential benefits and limitations of using the current multimodal VAEs for unsupervised learning of robotic motion trajectories based on vision and language.
Tell and show: Combining multiple modalities to communicate manipulation tasks to a robot
Apr 02, 2024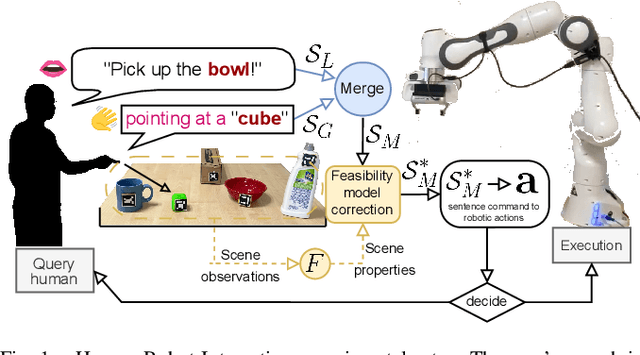
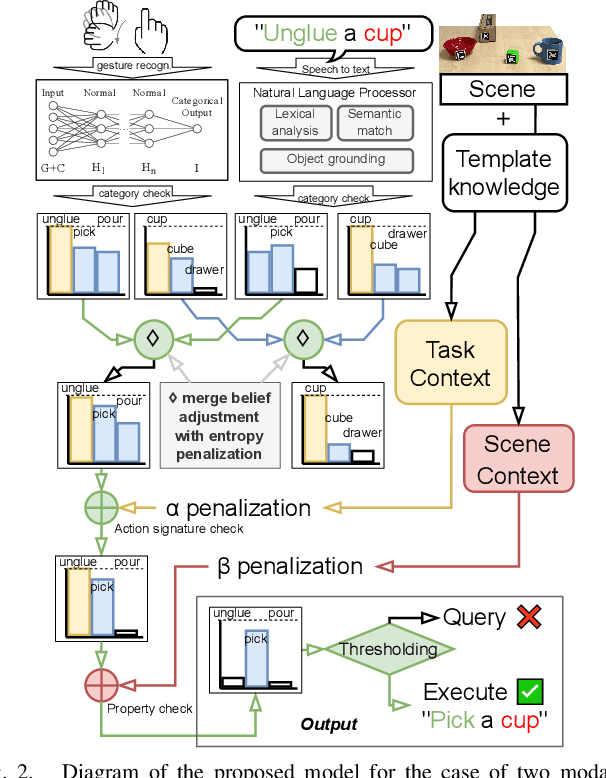
As human-robot collaboration is becoming more widespread, there is a need for a more natural way of communicating with the robot. This includes combining data from several modalities together with the context of the situation and background knowledge. Current approaches to communication typically rely only on a single modality or are often very rigid and not robust to missing, misaligned, or noisy data. In this paper, we propose a novel method that takes inspiration from sensor fusion approaches to combine uncertain information from multiple modalities and enhance it with situational awareness (e.g., considering object properties or the scene setup). We first evaluate the proposed solution on simulated bimodal datasets (gestures and language) and show by several ablation experiments the importance of various components of the system and its robustness to noisy, missing, or misaligned observations. Then we implement and evaluate the model on the real setup. In human-robot interaction, we must also consider whether the selected action is probable enough to be executed or if we should better query humans for clarification. For these purposes, we enhance our model with adaptive entropy-based thresholding that detects the appropriate thresholds for different types of interaction showing similar performance as fine-tuned fixed thresholds.