 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Exploration of Cave Environments by Unmanned Aerial Vehicles
Paper and Code
Mar 06, 2023
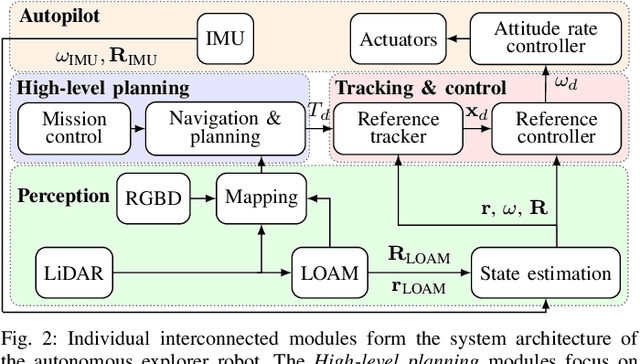

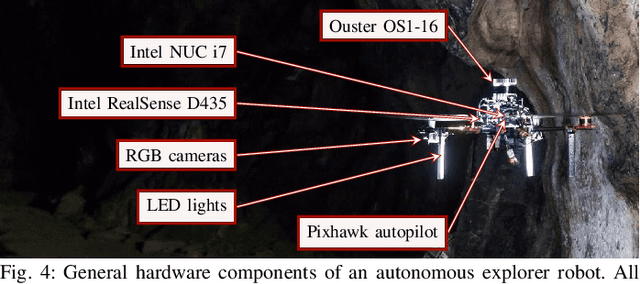
This paper presents a self-contained system for the robust utilization of aerial robots in the autonomous exploration of cave environments to help human explorers, first responders, and speleologists. The proposed system is generally applicable to an arbitrary exploration task within an unknown and unstructured subterranean environment and interconnects crucial robotic subsystems to provide full autonomy of the robots. Such subsystems primarily include mapping, path and trajectory planning, localization, control, and decision making. Due to the diversity, complexity, and structural uncertainty of natural cave environments, the proposed system allows for the possible use of any arbitrary exploration strategy for a single robot, as well as for a cooperating team. A multi-robot cooperation strategy that maximizes the limited flight time of each aerial robot is proposed for exploration and search & rescue scenarios where the homing of all deployed robots back to an initial location is not required The entire system is validated in a comprehensive experimental analysis comprising of hours of flight time in a real-world cave environment, as well as by hundreds of hours within a state-of-the-art virtual testbed that was developed for the DARPA Subterranean Challenge robotic competition. Among others, experimental results include multiple real-world exploration flights traveling over 470 meters on a single battery in a demanding unknown cave environment.