 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Deployment of an Autonomous Unmanned Ground Vehicle for Urban Firefighting Scenarios
Jul 08, 2021
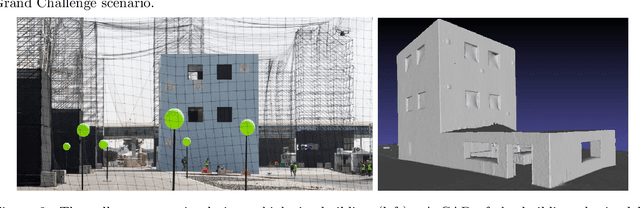
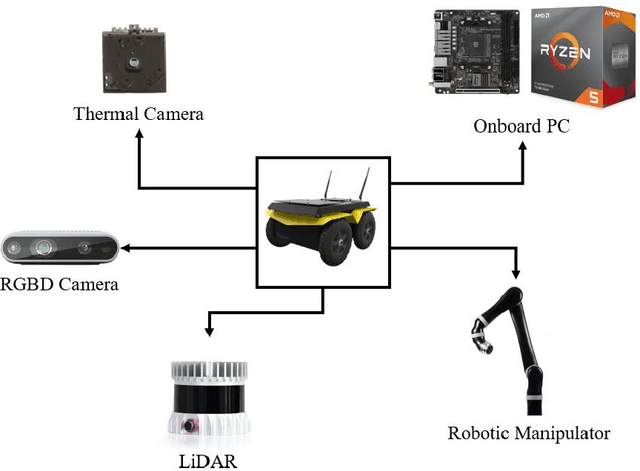
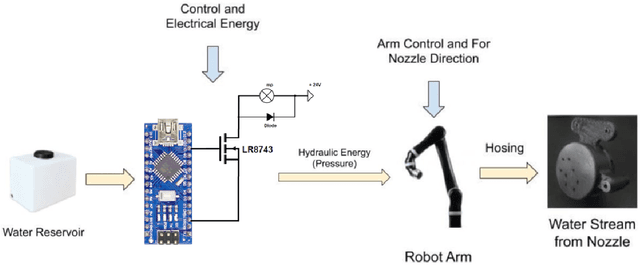
Autonomous mobile robots have the potential to solve missions that are either too complex or dangerous to be accomplished by humans. In this paper, we address the design and autonomous deployment of a ground vehicle equipped with a robotic arm for urban firefighting scenarios. We describe the hardware design and algorithm approaches for autonomous navigation, planning, fire source identification and abatement in unstructured urban scenarios. The approach employs on-board sensors for autonomous navigation and thermal camera information for source identification. A custom electro{mechanical pump is responsible to eject water for fire abatement. The proposed approach is validated through several experiments, where we show the ability to identify and abate a sample heat source in a building. The whole system was developed and deployed during the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020, for Challenge No. 3 Fire Fighting Inside a High-Rise Building and during the Grand Challenge where our approach scored the highest number of points among all UGV solutions and was instrumental to win the first place.
Mobile Manipulator for Autonomous Localization, Grasping and Precise Placement of Construction Material in a Semi-structured Environment
Nov 16, 2020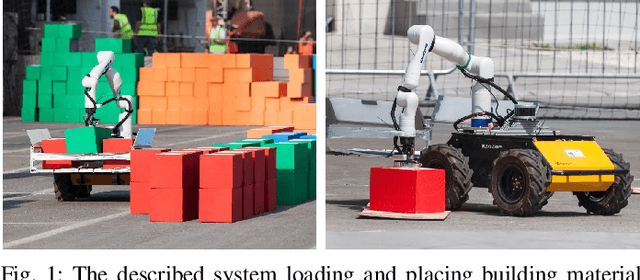
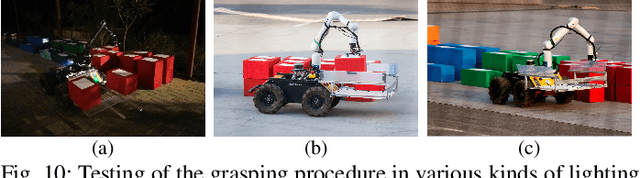
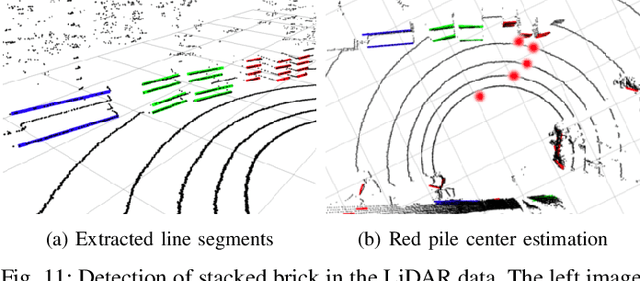
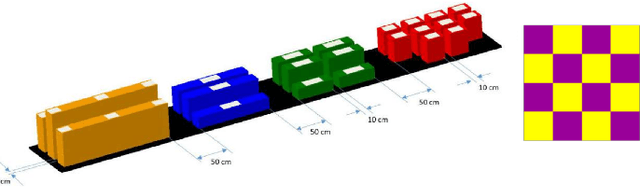
Mobile manipulators have the potential to revolutionize modern agriculture, logistics and manufacturing. In this work, we present the design of a ground-based mobile manipulator for automated structure assembly. The proposed system is capable of autonomous localization, grasping, transportation and deployment of construction material in a semi-structured environment. Special effort was put into making the system invariant to lighting changes, and not reliant on external positioning systems. Therefore, the presented system is self-contained and capable of operating in outdoor and indoor conditions alike. Finally, we present means to extend the perceptive radius of the vehicle by using it in cooperation with an autonomous drone, which provides aerial reconnaissance. Performance of the proposed system has been evaluated in a series of experiments conducted in real-world conditions.
Cooperative Pollution Source Localization and Cleanup with a Bio-inspired Swarm Robot Aggregation
Jul 22, 2019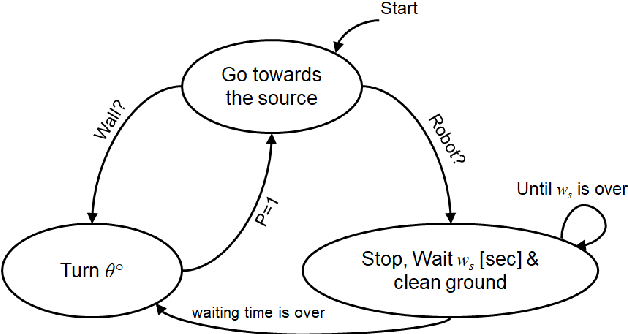
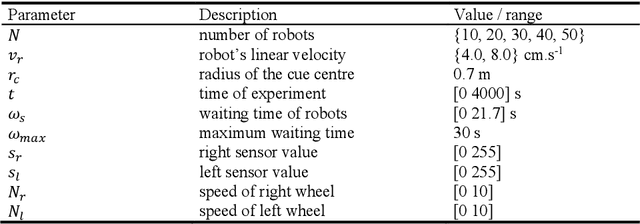
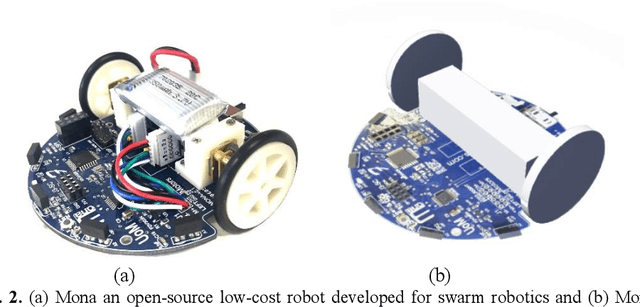

Using robots for exploration of extreme and hazardous environments has the potential to significantly improve human safety. For example, robotic solutions can be deployed to find the source of a chemical leakage and clean the contaminated area. This paper demonstrates a proof-of-concept bio-inspired exploration method using a swarm robotic system, which is based on a combination of two bio-inspired behaviours: aggregation, and pheromone tracking. The main idea of the work presented is to follow pheromone trails to find the source of a chemical leakage and then carry out a decontamination task by aggregating at the critical zone. Using experiments conducted by a simulated model of a Mona robot, we evaluate the effects of population size and robot speed on the ability of the swarm in a decontamination task. The results indicate the feasibility of deploying robotic swarms in an exploration and cleaning task in an extreme environment.