 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
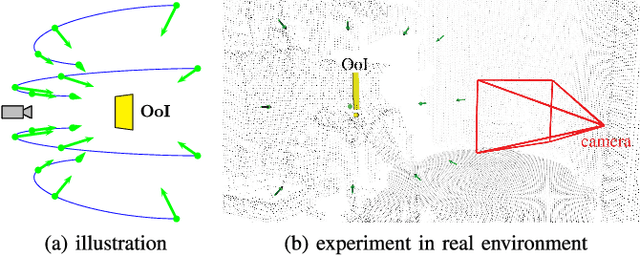
Add to EdgeFast Collective Evasion in Self-Localized Swarms of Unmanned Aerial Vehicles
Aug 20, 2024A novel approach for achieving fast evasion in self-localized swarms of Unmanned Aerial Vehicles (UAVs) threatened by an intruding moving object is presented in this paper. Motivated by natural self-organizing systems, the presented approach of fast and collective evasion enables the UAV swarm to avoid dynamic objects (interferers) that are actively approaching the group. The main objective of the proposed technique is the fast and safe escape of the swarm from an interferer ~discovered in proximity. This method is inspired by the collective behavior of groups of certain animals, such as schools of fish or flocks of birds. These animals use the limited information of their sensing organs and decentralized control to achieve reliable and effective group motion. The system presented in this paper is intended to execute the safe coordination of UAV swarms with a large number of agents. Similar to natural swarms, this system propagates a fast shock of information about detected interferers throughout the group to achieve dynamic and collective evasion. The proposed system is fully decentralized using only onboard sensors to mutually localize swarm agents and interferers, similar to how animals accomplish this behavior. As a result, the communication structure between swarm agents is not overwhelmed by information about the state (position and velocity) of each individual and it is reliable to communication dropouts. The proposed system and theory were numerically evaluated and verified in real-world experiments.
Autonomous Reflectance Transformation Imaging by a Team of Unmanned Aerial Vehicles
Mar 02, 2023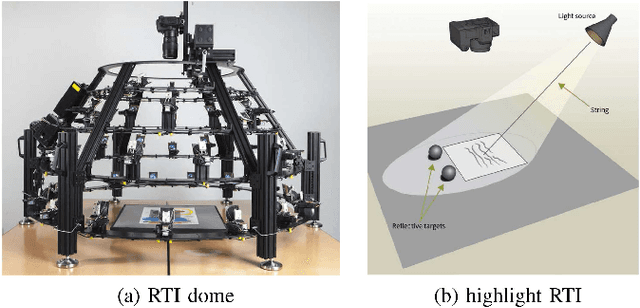

A Reflectance Transformation Imaging technique (RTI) realized by multi-rotor Unmanned Aerial Vehicles (UAVs) with a focus on deployment in difficult to access buildings is presented in this letter. RTI is a computational photographic method that captures a surface shape and color of a subject and enables its interactive re-lighting from any direction in a software viewer, revealing details that are not visible with the naked eye. The input of RTI is a set of images captured by a static camera, each one under illumination from a different known direction. We present an innovative approach applying two multi-rotor UAVs to perform this scanning procedure in locations that are hardly accessible or even inaccessible for people. The proposed system is designed for its safe deployment within real-world scenarios in historical buildings with priceless historical value.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022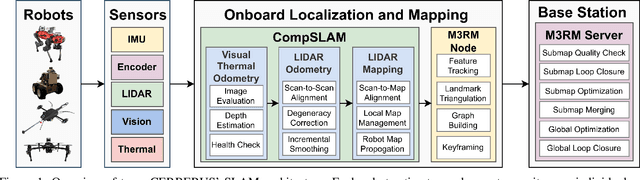
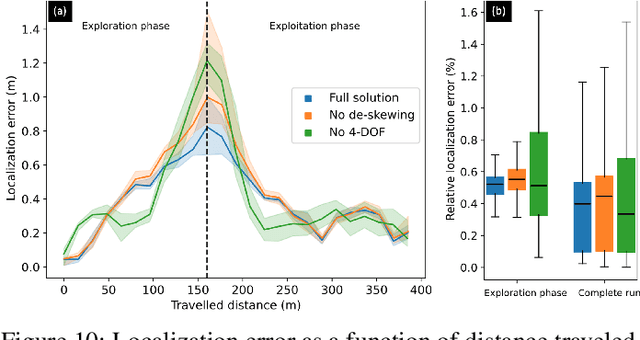
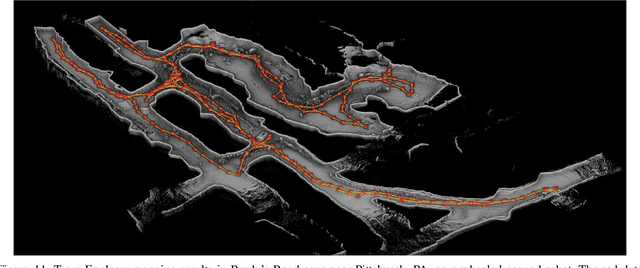
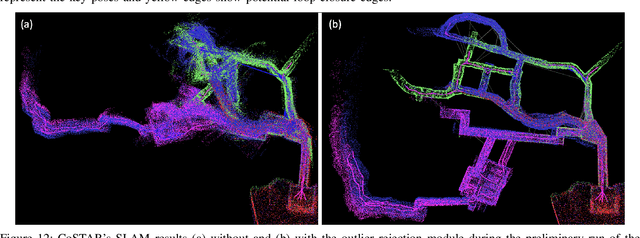
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
System for multi-robotic exploration of underground environments CTU-CRAS-NORLAB in the DARPA Subterranean Challenge
Oct 12, 2021
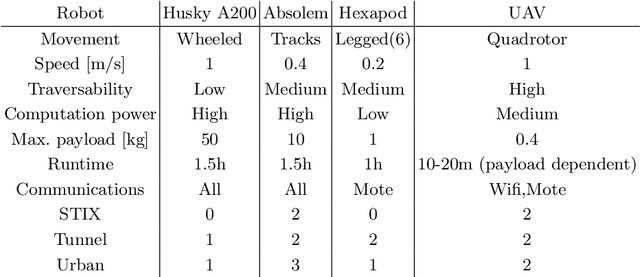
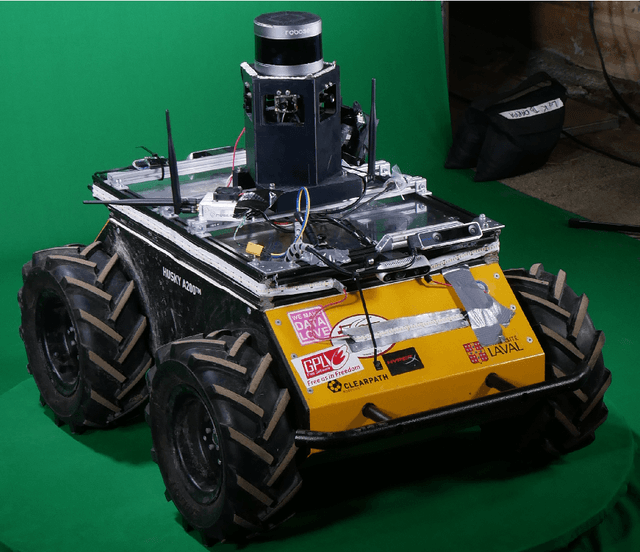
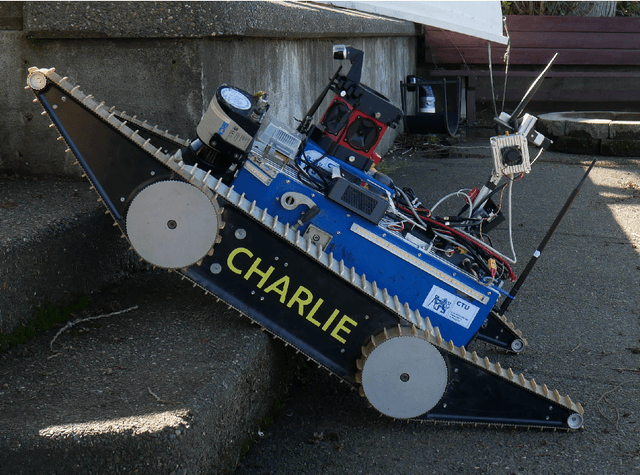
We present a field report of CTU-CRAS-NORLAB team from the Subterranean Challenge (SubT) organised by the Defense Advanced Research Projects Agency (DARPA). The contest seeks to advance technologies that would improve the safety and efficiency of search-and-rescue operations in GPS-denied environments. During the contest rounds, teams of mobile robots have to find specific objects while operating in environments with limited radio communication, e.g. mining tunnels, underground stations or natural caverns. We present a heterogeneous exploration robotic system of the CTU-CRAS-NORLAB team, which achieved the third rank at the SubT Tunnel and Urban Circuit rounds and surpassed the performance of all other non-DARPA-funded teams. The field report describes the team's hardware, sensors, algorithms and strategies, and discusses the lessons learned by participating at the DARPA SubT contest.