 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Reflectance Transformation Imaging by a Team of Unmanned Aerial Vehicles
Mar 02, 2023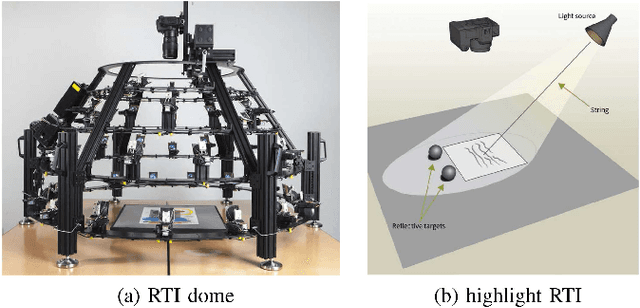

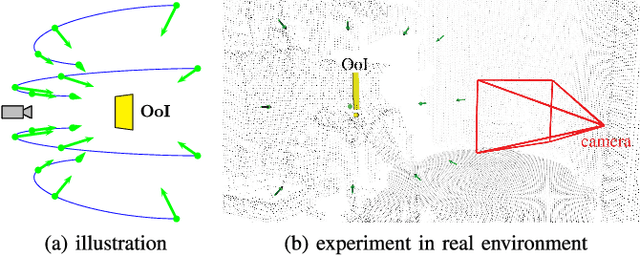
A Reflectance Transformation Imaging technique (RTI) realized by multi-rotor Unmanned Aerial Vehicles (UAVs) with a focus on deployment in difficult to access buildings is presented in this letter. RTI is a computational photographic method that captures a surface shape and color of a subject and enables its interactive re-lighting from any direction in a software viewer, revealing details that are not visible with the naked eye. The input of RTI is a set of images captured by a static camera, each one under illumination from a different known direction. We present an innovative approach applying two multi-rotor UAVs to perform this scanning procedure in locations that are hardly accessible or even inaccessible for people. The proposed system is designed for its safe deployment within real-world scenarios in historical buildings with priceless historical value.
System for multi-robotic exploration of underground environments CTU-CRAS-NORLAB in the DARPA Subterranean Challenge
Oct 12, 2021
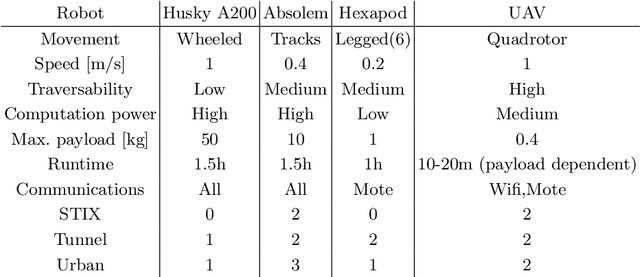
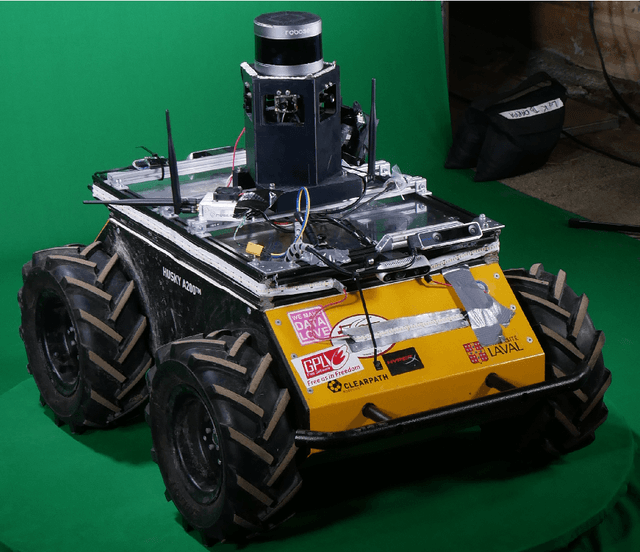
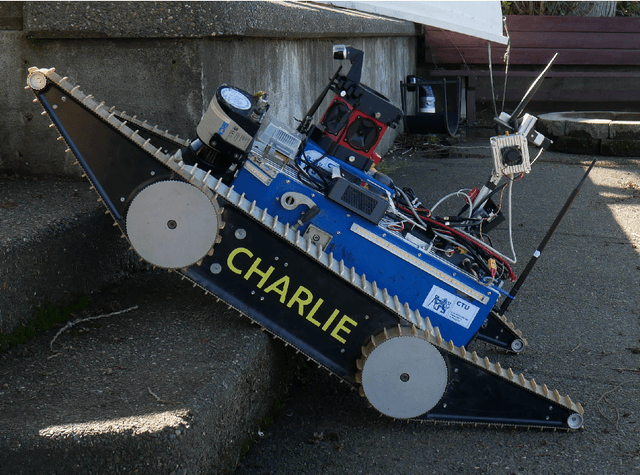
We present a field report of CTU-CRAS-NORLAB team from the Subterranean Challenge (SubT) organised by the Defense Advanced Research Projects Agency (DARPA). The contest seeks to advance technologies that would improve the safety and efficiency of search-and-rescue operations in GPS-denied environments. During the contest rounds, teams of mobile robots have to find specific objects while operating in environments with limited radio communication, e.g. mining tunnels, underground stations or natural caverns. We present a heterogeneous exploration robotic system of the CTU-CRAS-NORLAB team, which achieved the third rank at the SubT Tunnel and Urban Circuit rounds and surpassed the performance of all other non-DARPA-funded teams. The field report describes the team's hardware, sensors, algorithms and strategies, and discusses the lessons learned by participating at the DARPA SubT contest.