 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-only UAV State Estimation for Fast Flights Without External Localization Systems: A2RL Drone Racing Finalist Approach
Feb 02, 2026Fast flights with aggressive maneuvers in cluttered GNSS-denied environments require fast, reliable, and accurate UAV state estimation. In this paper, we present an approach for onboard state estimation of a high-speed UAV using a monocular RGB camera and an IMU. Our approach fuses data from Visual-Inertial Odometry (VIO), an onboard landmark-based camera measurement system, and an IMU to produce an accurate state estimate. Using onboard measurement data, we estimate and compensate for VIO drift through a novel mathematical drift model. State-of-the-art approaches often rely on more complex hardware (e.g., stereo cameras or rangefinders) and use uncorrected drifting VIO velocities, orientation, and angular rates, leading to errors during fast maneuvers. In contrast, our method corrects all VIO states (position, orientation, linear and angular velocity), resulting in accurate state estimation even during rapid and dynamic motion. Our approach was thoroughly validated through 1600 simulations and numerous real-world experiments. Furthermore, we applied the proposed method in the A2RL Drone Racing Challenge 2025, where our team advanced to the final four out of 210 teams and earned a medal.
Deployment of Reliable Visual Inertial Odometry Approaches for Unmanned Aerial Vehicles in Real-world Environment
Feb 03, 2023Integration of Visual Inertial Odometry (VIO) methods into a modular control system designed for deployment of Unmanned Aerial Vehicles (UAVs) and teams of cooperating UAVs in real-world conditions are presented in this paper. Reliability analysis and fair performance comparison of several methods integrated into a control pipeline for achieving full autonomy in real conditions is provided. Although most VIO algorithms achieve excellent localization precision and negligible drift on artificially created datasets, the aspects of reliability in non-ideal situations, robustness to degraded sensor data, and the effects of external disturbances and feedback control coupling are not well studied. These imperfections, which are inherently present in cases of real-world deployment of UAVs, negatively affect the ability of the most used VIO approaches to output a sensible pose estimation. We identify the conditions that are critical for a reliable flight under VIO localization and propose workarounds and compensations for situations in which such conditions cannot be achieved. The performance of the UAV system with integrated VIO methods is quantitatively analyzed w.r.t. RTK ground truth and the ability to provide reliable pose estimation for the feedback control is demonstrated onboard a UAV that is tracking dynamic trajectories under challenging illumination.
SphereMap: Dynamic Multi-Layer Graph Structure for Rapid Safety-Aware UAV Planning
Feb 03, 2023



A flexible topological representation consisting of a two-layer graph structure built on-board an Unmanned Aerial Vehicle (UAV) by continuously filling the free space of an occupancy map with intersecting spheres is proposed in this \paper{}. Most state-of-the-art planning methods find the shortest paths while keeping the UAV at a pre-defined distance from obstacles. Planning over the proposed structure reaches this pre-defined distance only when necessary, maintaining a safer distance otherwise, while also being orders of magnitude faster than other state-of-the-art methods. Furthermore, we demonstrate how this graph representation can be converted into a lightweight shareable topological-volumetric map of the environment, which enables decentralized multi-robot cooperation. The proposed approach was successfully validated in several kilometers of real subterranean environments, such as caves, devastated industrial buildings, and in the harsh and complex setting of the final event of the DARPA SubT Challenge, which aims to mimic the conditions of real search and rescue missions as closely as possible, and where our approach achieved the \nth{2} place in the virtual track.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022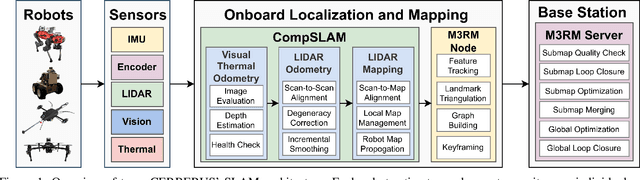
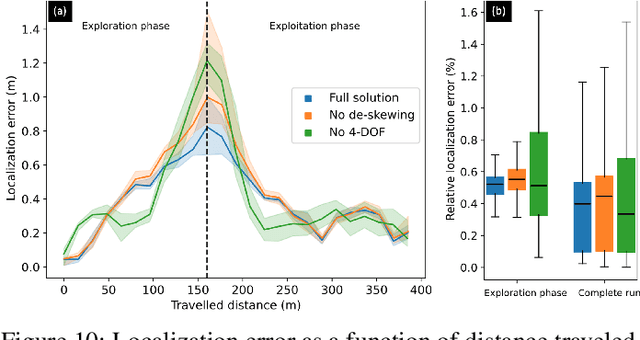
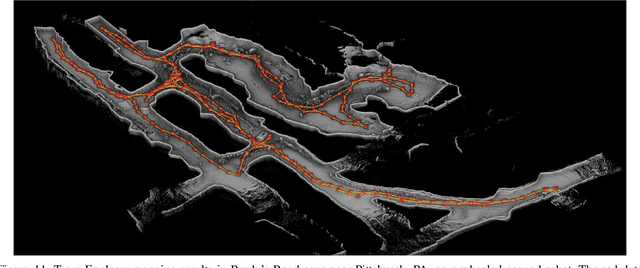
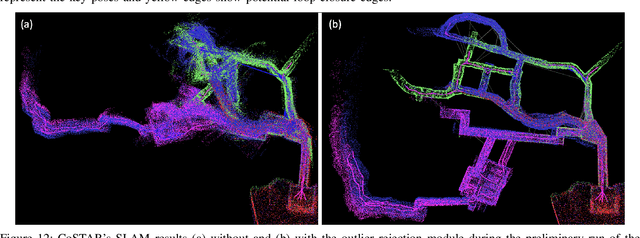
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
System for multi-robotic exploration of underground environments CTU-CRAS-NORLAB in the DARPA Subterranean Challenge
Oct 12, 2021
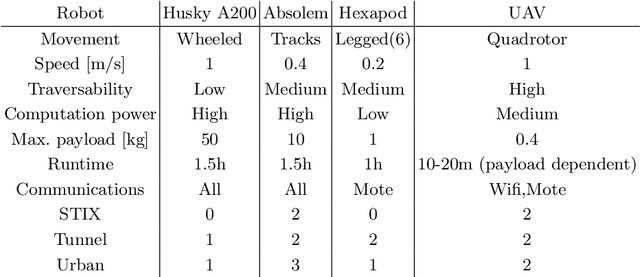
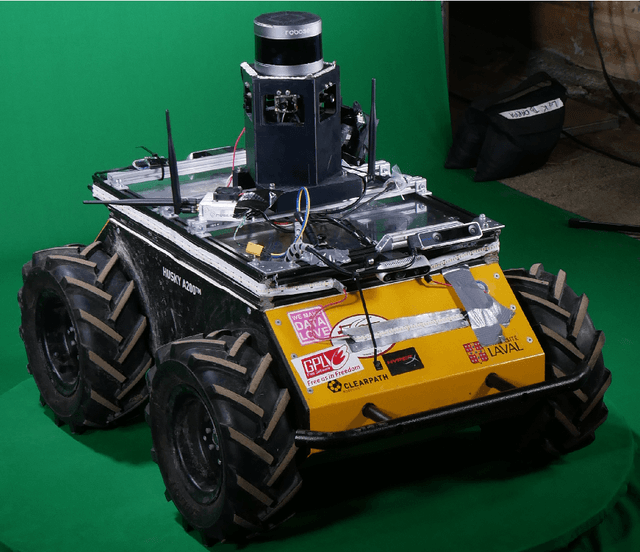
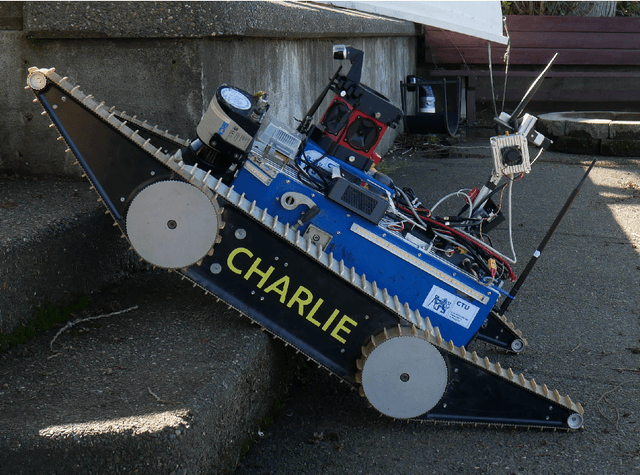
We present a field report of CTU-CRAS-NORLAB team from the Subterranean Challenge (SubT) organised by the Defense Advanced Research Projects Agency (DARPA). The contest seeks to advance technologies that would improve the safety and efficiency of search-and-rescue operations in GPS-denied environments. During the contest rounds, teams of mobile robots have to find specific objects while operating in environments with limited radio communication, e.g. mining tunnels, underground stations or natural caverns. We present a heterogeneous exploration robotic system of the CTU-CRAS-NORLAB team, which achieved the third rank at the SubT Tunnel and Urban Circuit rounds and surpassed the performance of all other non-DARPA-funded teams. The field report describes the team's hardware, sensors, algorithms and strategies, and discusses the lessons learned by participating at the DARPA SubT contest.
Data-driven Policy Transfer with Imprecise Perception Simulation
Apr 05, 2018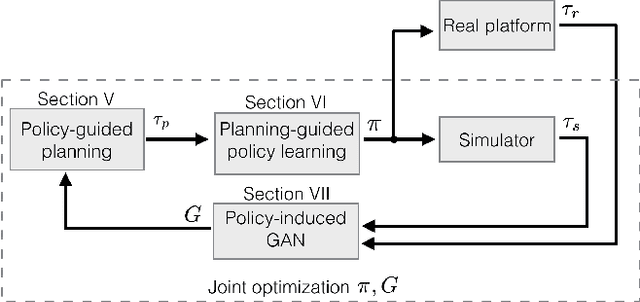
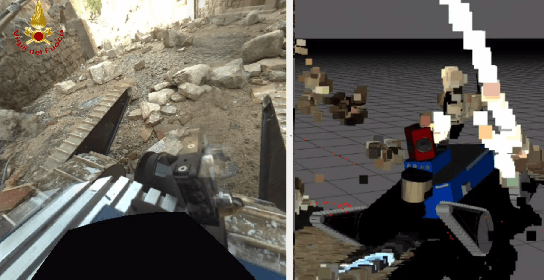
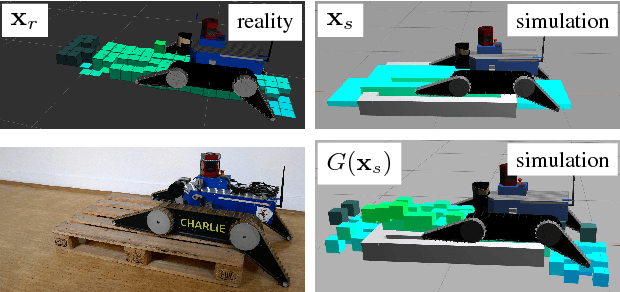
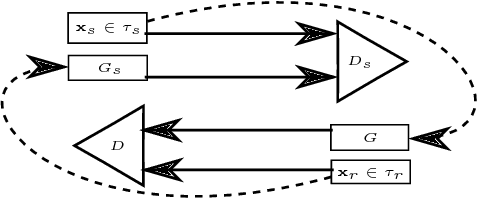
The paper presents a complete pipeline for learning continuous motion control policies for a mobile robot when only a non-differentiable physics simulator of robot-terrain interactions is available. The multi-modal state estimation of the robot is also complex and difficult to simulate, so we simultaneously learn a generative model which refines simulator outputs. We propose a coarse-to-fine learning paradigm, where the coarse motion planning is alternated with imitation learning and policy transfer to the real robot. The policy is jointly optimized with the generative model. We evaluate the method on a real-world platform in a batch of experiments.