 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
A Behavior Architecture for Fast Humanoid Robot Door Traversals
Nov 05, 2024



Towards the role of humanoid robots as squad mates in urban operations and other domains, we identified doors as a major area lacking capability development. In this paper, we focus on the ability of humanoid robots to navigate and deal with doors. Human-sized doors are ubiquitous in many environment domains and the humanoid form factor is uniquely suited to operate and traverse them. We present an architecture which incorporates GPU accelerated perception and a tree based interactive behavior coordination system with a whole body motion and walking controller. Our system is capable of performing door traversals on a variety of door types. It supports rapid authoring of behaviors for unseen door types and techniques to achieve re-usability of those authored behaviors. The behaviors are modelled using trees and feature logical reactivity and action sequences that can be executed with layered concurrency to increase speed. Primitive actions are built on top of our existing whole body controller which supports manipulation while walking. We include a perception system using both neural networks and classical computer vision for door mechanism detection outside of the lab environment. We present operator-robot interdependence analysis charts to explore how human cognition is combined with artificial intelligence to produce complex robot behavior. Finally, we present and discuss real robot performances of fast door traversals on our Nadia humanoid robot. Videos online at https://www.youtube.com/playlist?list=PLXuyT8w3JVgMPaB5nWNRNHtqzRK8i68dy.
A Boosted Machine Learning Framework for the Improvement of Phase and Crystal Structure Prediction of High Entropy Alloys Using Thermodynamic and Configurational Parameters
Sep 02, 2023The reason behind the remarkable properties of High-Entropy Alloys (HEAs) is rooted in the diverse phases and the crystal structures they contain. In the realm of material informatics, employing machine learning (ML) techniques to classify phases and crystal structures of HEAs has gained considerable significance. In this study, we assembled a new collection of 1345 HEAs with varying compositions to predict phases. Within this collection, there were 705 sets of data that were utilized to predict the crystal structures with the help of thermodynamics and electronic configuration. Our study introduces a methodical framework i.e., the Pearson correlation coefficient that helps in selecting the strongly co-related features to increase the prediction accuracy. This study employed five distinct boosting algorithms to predict phases and crystal structures, offering an enhanced guideline for improving the accuracy of these predictions. Among all these algorithms, XGBoost gives the highest accuracy of prediction (94.05%) for phases and LightGBM gives the highest accuracy of prediction of crystal structure of the phases (90.07%). The quantification of the influence exerted by parameters on the model's accuracy was conducted and a new approach was made to elucidate the contribution of individual parameters in the process of phase prediction and crystal structure prediction.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022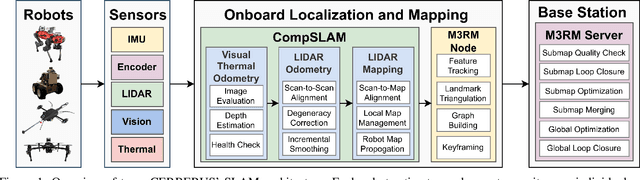
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
LAMP 2.0: A Robust Multi-Robot SLAM System for Operation in Challenging Large-Scale Underground Environments
May 31, 2022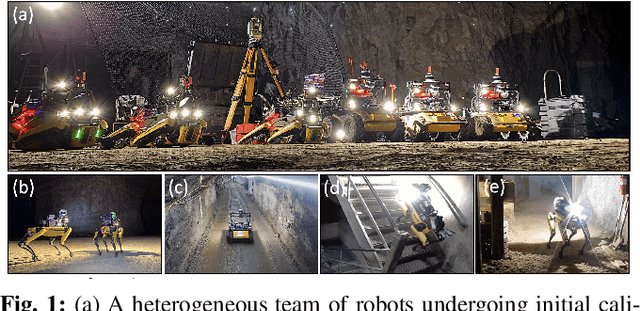
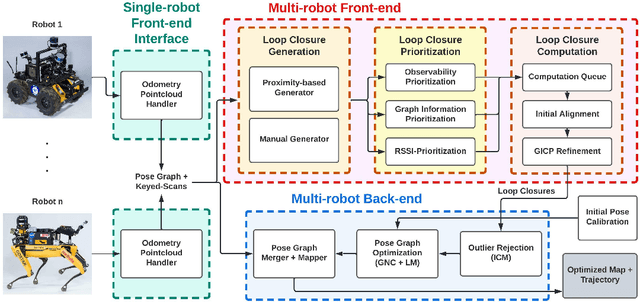
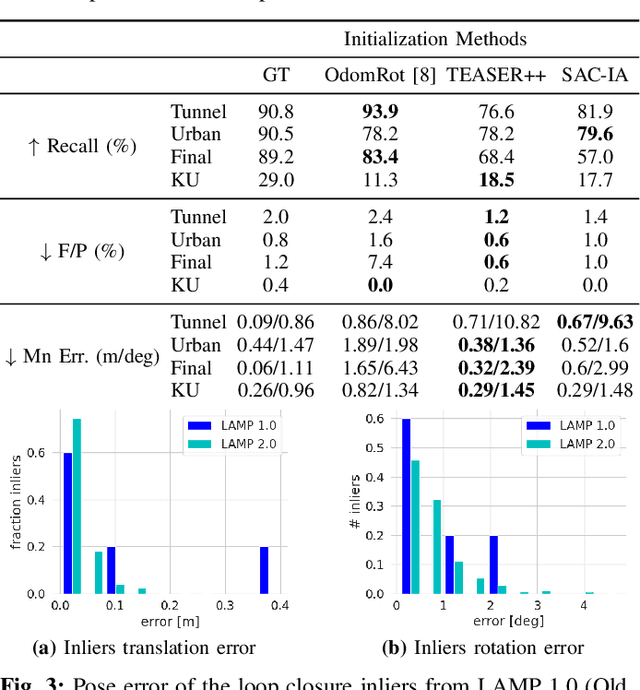
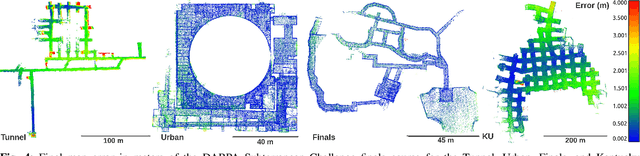
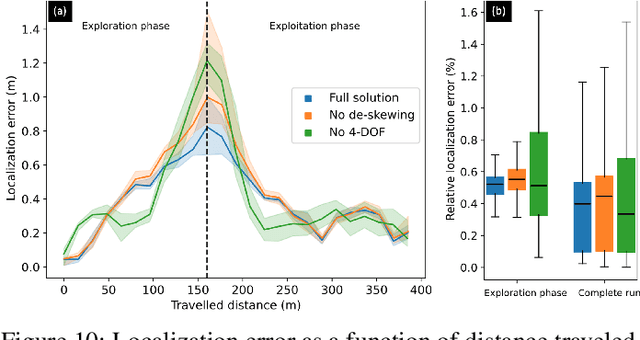
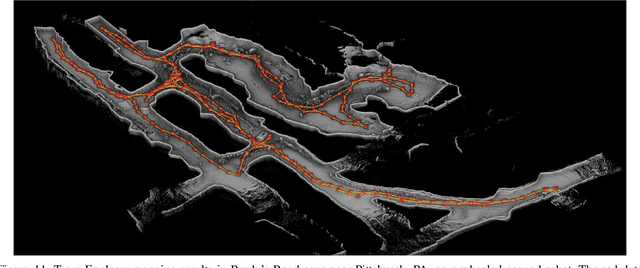
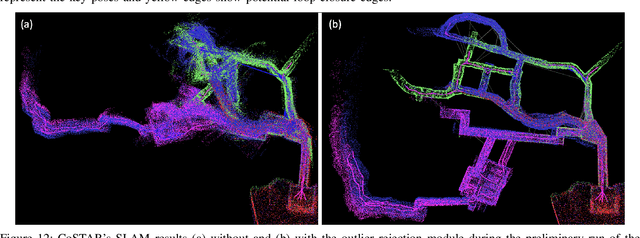
Search and rescue with a team of heterogeneous mobile robots in unknown and large-scale underground environments requires high-precision localization and mapping. This crucial requirement is faced with many challenges in complex and perceptually-degraded subterranean environments, as the onboard perception system is required to operate in off-nominal conditions (poor visibility due to darkness and dust, rugged and muddy terrain, and the presence of self-similar and ambiguous scenes). In a disaster response scenario and in the absence of prior information about the environment, robots must rely on noisy sensor data and perform Simultaneous Localization and Mapping (SLAM) to build a 3D map of the environment and localize themselves and potential survivors. To that end, this paper reports on a multi-robot SLAM system developed by team CoSTAR in the context of the DARPA Subterranean Challenge. We extend our previous work, LAMP, by incorporating a single-robot front-end interface that is adaptable to different odometry sources and lidar configurations, a scalable multi-robot front-end to support inter- and intra-robot loop closure detection for large scale environments and multi-robot teams, and a robust back-end equipped with an outlier-resilient pose graph optimization based on Graduated Non-Convexity. We provide a detailed ablation study on the multi-robot front-end and back-end, and assess the overall system performance in challenging real-world datasets collected across mines, power plants, and caves in the United States. We also release our multi-robot back-end datasets (and the corresponding ground truth), which can serve as challenging benchmarks for large-scale underground SLAM.