 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHANDOFF: Humanoid Agentic Task-Space Whole-Body Control via Distilled Complementary Teachers
Jun 04, 2026For a humanoid robot to be deployed in the real world, the choice of command space (i.e., the interface between task planning and whole-body control) is crucial. Existing whole-body controllers typically demand dense kinematic or spatial references that planners struggle to synthesize from task semantics. We instead propose a compact, explicit interface that is intuitive, general, modular, and expressive enough for diverse manipulation skills. To this end, we introduce HANDOFF, a single humanoid whole-body controller that follows this interface and is distilled via multi-teacher KL distillation under a context-conditioned gating scheme into a mixture-of-experts student from three complementary specialists: whole-body motion tracking with safety-filtered data, locomotion, and fall-recovery. On the Unitree G1, HANDOFF matches state-of-the-art velocity tracking and offers one of the largest robust manipulation workspaces. We further demonstrate hardware feasibility through multiple natural-language-driven task roll-outs, powered by a VLM-driven agentic planner with no task-specific data or controller fine-tuning.
Embedding Classical Balance Control Principles in Reinforcement Learning for Humanoid Recovery
Mar 09, 2026Humanoid robots remain vulnerable to falls and unrecoverable failure states, limiting their practical utility in unstructured environments. While reinforcement learning has demonstrated stand-up behaviors, existing approaches treat recovery as a pure task-reward problem without an explicit representation of the balance state. We present a unified RL policy that addresses this limitation by embedding classical balance metrics: capture point, center-of-mass state, and centroidal momentum, as privileged critic inputs and shaping rewards directly around these quantities during training, while the actor relies solely on proprioception for zero-shot hardware transfer. Without reference trajectories or scripted contacts, a single policy spans the full recovery spectrum: ankle and hip strategies for small disturbances, corrective stepping under large pushes, and compliant falling with multi-contact stand-up using the hands, elbows, and knees. Trained on the Unitree H1-2 in Isaac Lab, the policy achieves a 93.4% recovery rate across randomized initial poses and unscripted fall configurations. An ablation study shows that removing the balance-informed structure causes stand-up learning to fail entirely, confirming that these metrics provide a meaningful learning signal rather than incidental structure. Sim-to-sim transfer to MuJoCo and preliminary hardware experiments further demonstrate cross-environment generalization. These results show that embedding interpretable balance structure into the learning framework substantially reduces time spent in failure states and broadens the envelope of autonomous recovery.
Stability-Aware Retargeting for Humanoid Multi-Contact Teleoperation
Oct 05, 2025Teleoperation is a powerful method to generate reference motions and enable humanoid robots to perform a broad range of tasks. However, teleoperation becomes challenging when using hand contacts and non-coplanar surfaces, often leading to motor torque saturation or loss of stability through slipping. We propose a centroidal stability-based retargeting method that dynamically adjusts contact points and posture during teleoperation to enhance stability in these difficult scenarios. Central to our approach is an efficient analytical calculation of the stability margin gradient. This gradient is used to identify scenarios for which stability is highly sensitive to teleoperation setpoints and inform the local adjustment of these setpoints. We validate the framework in simulation and hardware by teleoperating manipulation tasks on a humanoid, demonstrating increased stability margins. We also demonstrate empirically that higher stability margins correlate with improved impulse resilience and joint torque margin.
Estimating Spatially-Dependent GPS Errors Using a Swarm of Robots
Jun 24, 2025External factors, including urban canyons and adversarial interference, can lead to Global Positioning System (GPS) inaccuracies that vary as a function of the position in the environment. This study addresses the challenge of estimating a static, spatially-varying error function using a team of robots. We introduce a State Bias Estimation Algorithm (SBE) whose purpose is to estimate the GPS biases. The central idea is to use sensed estimates of the range and bearing to the other robots in the team to estimate changes in bias across the environment. A set of drones moves in a 2D environment, each sampling data from GPS, range, and bearing sensors. The biases calculated by the SBE at estimated positions are used to train a Gaussian Process Regression (GPR) model. We use a Sparse Gaussian process-based Informative Path Planning (IPP) algorithm that identifies high-value regions of the environment for data collection. The swarm plans paths that maximize information gain in each iteration, further refining their understanding of the environment's positional bias landscape. We evaluated SBE and IPP in simulation and compared the IPP methodology to an open-loop strategy.
Humanoid Locomotion and Manipulation: Current Progress and Challenges in Control, Planning, and Learning
Jan 03, 2025



Humanoid robots have great potential to perform various human-level skills. These skills involve locomotion, manipulation, and cognitive capabilities. Driven by advances in machine learning and the strength of existing model-based approaches, these capabilities have progressed rapidly, but often separately. Therefore, a timely overview of current progress and future trends in this fast-evolving field is essential. This survey first summarizes the model-based planning and control that have been the backbone of humanoid robotics for the past three decades. We then explore emerging learning-based methods, with a focus on reinforcement learning and imitation learning that enhance the versatility of loco-manipulation skills. We examine the potential of integrating foundation models with humanoid embodiments, assessing the prospects for developing generalist humanoid agents. In addition, this survey covers emerging research for whole-body tactile sensing that unlocks new humanoid skills that involve physical interactions. The survey concludes with a discussion of the challenges and future trends.
A Behavior Architecture for Fast Humanoid Robot Door Traversals
Nov 05, 2024



Towards the role of humanoid robots as squad mates in urban operations and other domains, we identified doors as a major area lacking capability development. In this paper, we focus on the ability of humanoid robots to navigate and deal with doors. Human-sized doors are ubiquitous in many environment domains and the humanoid form factor is uniquely suited to operate and traverse them. We present an architecture which incorporates GPU accelerated perception and a tree based interactive behavior coordination system with a whole body motion and walking controller. Our system is capable of performing door traversals on a variety of door types. It supports rapid authoring of behaviors for unseen door types and techniques to achieve re-usability of those authored behaviors. The behaviors are modelled using trees and feature logical reactivity and action sequences that can be executed with layered concurrency to increase speed. Primitive actions are built on top of our existing whole body controller which supports manipulation while walking. We include a perception system using both neural networks and classical computer vision for door mechanism detection outside of the lab environment. We present operator-robot interdependence analysis charts to explore how human cognition is combined with artificial intelligence to produce complex robot behavior. Finally, we present and discuss real robot performances of fast door traversals on our Nadia humanoid robot. Videos online at https://www.youtube.com/playlist?list=PLXuyT8w3JVgMPaB5nWNRNHtqzRK8i68dy.
High-Speed and Impact Resilient Teleoperation of Humanoid Robots
Sep 06, 2024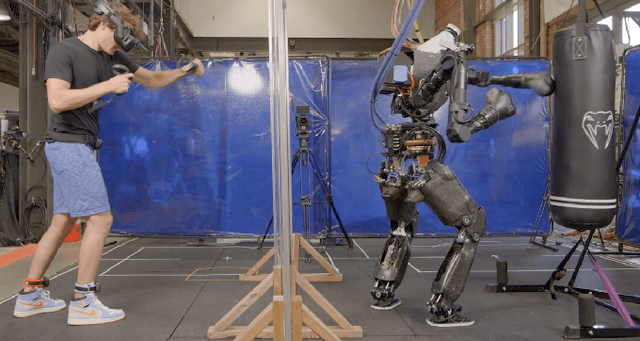
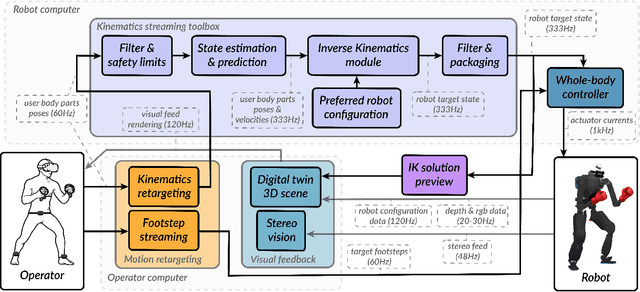

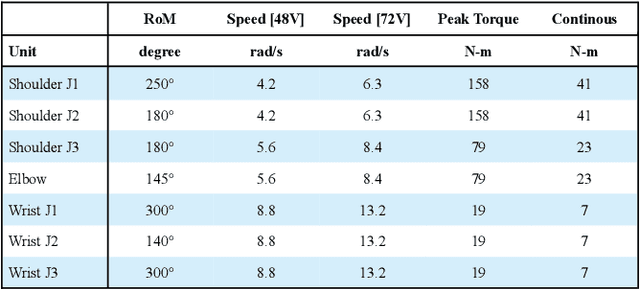
Teleoperation of humanoid robots has long been a challenging domain, necessitating advances in both hardware and software to achieve seamless and intuitive control. This paper presents an integrated solution based on several elements: calibration-free motion capture and retargeting, low-latency fast whole-body kinematics streaming toolbox and high-bandwidth cycloidal actuators. Our motion retargeting approach stands out for its simplicity, requiring only 7 IMUs to generate full-body references for the robot. The kinematics streaming toolbox, ensures real-time, responsive control of the robot's movements, significantly reducing latency and enhancing operational efficiency. Additionally, the use of cycloidal actuators makes it possible to withstand high speeds and impacts with the environment. Together, these approaches contribute to a teleoperation framework that offers unprecedented performance. Experimental results on the humanoid robot Nadia demonstrate the effectiveness of the integrated system.
Physically Consistent Online Inertial Adaptation for Humanoid Loco-manipulation
May 13, 2024



The ability to accomplish manipulation and locomotion tasks in the presence of significant time-varying external loads is a remarkable skill of humans that has yet to be replicated convincingly by humanoid robots. Such an ability will be a key requirement in the environments we envision deploying our robots: dull, dirty, and dangerous. External loads constitute a large model bias, which is typically unaccounted for. In this work, we enable our humanoid robot to engage in loco-manipulation tasks in the presence of significant model bias due to external loads. We propose an online estimation and control framework involving the combination of a physically consistent extended Kalman filter for inertial parameter estimation coupled to a whole-body controller. We showcase our results both in simulation and in hardware, where weights are mounted on Nadia's wrist links as a proxy for engaging in tasks where large external loads are applied to the robot.
Multi-Contact Inertial Estimation and Localization in Legged Robots
Mar 25, 2024



Optimal estimation is a promising tool for multi-contact inertial estimation and localization. To harness its advantages in robotics, it is crucial to solve these large and challenging optimization problems efficiently. To tackle this, we (i) develop a multiple-shooting solver that exploits both temporal and parametric structures through a parametrized Riccati recursion. Additionally, we (ii) propose an inertial local manifold that ensures its full physical consistency. It also enhances convergence compared to the singularity-free log-Cholesky approach. To handle its singularities, we (iii) introduce a nullspace approach in our optimal estimation solver. We (iv) finally develop the analytical derivatives of contact dynamics for both inertial parametrizations. Our framework can successfully solve estimation problems for complex maneuvers such as brachiation in humanoids. We demonstrate its numerical capabilities across various robotics tasks and its benefits in experimental trials with the Go1 robot.
Efficient, Dynamic Locomotion through Step Placement with Straight Legs and Rolling Contacts
Oct 19, 2023For humans, fast, efficient walking over flat ground represents the vast majority of locomotion that an individual experiences on a daily basis, and for an effective, real-world humanoid robot the same will likely be the case. In this work, we propose a locomotion controller for efficient walking over near-flat ground using a relatively simple, model-based controller that utilizes a novel combination of several interesting design features including an ALIP-based step adjustment strategy, stance leg length control as an alternative to center of mass height control, and rolling contact for heel-to-toe motion of the stance foot. We then present the results of this controller on our robot Nadia, both in simulation and on hardware. These results include validation of this controller's ability to perform fast, reliable forward walking at 0.75 m/s along with backwards walking, side-stepping, turning in place, and push recovery. We also present an efficiency comparison between the proposed control strategy and our baseline walking controller over three steady-state walking speeds. Lastly, we demonstrate some of the benefits of utilizing rolling contact in the stance foot, specifically the reduction of necessary positive and negative work throughout the stride.