 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepairing Neural Networks for Safety in Robotic Systems using Predictive Models
Nov 07, 2024



This paper introduces a new method for safety-aware robot learning, focusing on repairing policies using predictive models. Our method combines behavioral cloning with neural network repair in a two-step supervised learning framework. It first learns a policy from expert demonstrations and then applies repair subject to predictive models to enforce safety constraints. The predictive models can encompass various aspects relevant to robot learning applications, such as proprioceptive states and collision likelihood. Our experimental results demonstrate that the learned policy successfully adheres to a predefined set of safety constraints on two applications: mobile robot navigation, and real-world lower-leg prostheses. Additionally, we have shown that our method effectively reduces repeated interaction with the robot, leading to substantial time savings during the learning process.
A Behavior Architecture for Fast Humanoid Robot Door Traversals
Nov 05, 2024



Towards the role of humanoid robots as squad mates in urban operations and other domains, we identified doors as a major area lacking capability development. In this paper, we focus on the ability of humanoid robots to navigate and deal with doors. Human-sized doors are ubiquitous in many environment domains and the humanoid form factor is uniquely suited to operate and traverse them. We present an architecture which incorporates GPU accelerated perception and a tree based interactive behavior coordination system with a whole body motion and walking controller. Our system is capable of performing door traversals on a variety of door types. It supports rapid authoring of behaviors for unseen door types and techniques to achieve re-usability of those authored behaviors. The behaviors are modelled using trees and feature logical reactivity and action sequences that can be executed with layered concurrency to increase speed. Primitive actions are built on top of our existing whole body controller which supports manipulation while walking. We include a perception system using both neural networks and classical computer vision for door mechanism detection outside of the lab environment. We present operator-robot interdependence analysis charts to explore how human cognition is combined with artificial intelligence to produce complex robot behavior. Finally, we present and discuss real robot performances of fast door traversals on our Nadia humanoid robot. Videos online at https://www.youtube.com/playlist?list=PLXuyT8w3JVgMPaB5nWNRNHtqzRK8i68dy.
Enhancing State Estimation in Robots: A Data-Driven Approach with Differentiable Ensemble Kalman Filters
Aug 19, 2023This paper introduces a novel state estimation framework for robots using differentiable ensemble Kalman filters (DEnKF). DEnKF is a reformulation of the traditional ensemble Kalman filter that employs stochastic neural networks to model the process noise implicitly. Our work is an extension of previous research on differentiable filters, which has provided a strong foundation for our modular and end-to-end differentiable framework. This framework enables each component of the system to function independently, leading to improved flexibility and versatility in implementation. Through a series of experiments, we demonstrate the flexibility of this model across a diverse set of real-world tracking tasks, including visual odometry and robot manipulation. Moreover, we show that our model effectively handles noisy observations, is robust in the absence of observations, and outperforms state-of-the-art differentiable filters in terms of error metrics. Specifically, we observe a significant improvement of at least 59% in translational error when using DEnKF with noisy observations. Our results underscore the potential of DEnKF in advancing state estimation for robotics. Code for DEnKF is available at https://github.com/ir-lab/DEnKF
Certifiably-correct Control Policies for Safe Learning and Adaptation in Assistive Robotics
Mar 12, 2023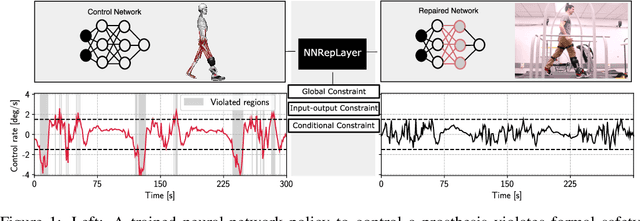



Guaranteeing safety in human-centric applications is critical in robot learning as the learned policies may demonstrate unsafe behaviors in formerly unseen scenarios. We present a framework to locally repair an erroneous policy network to satisfy a set of formal safety constraints using Mixed Integer Quadratic Programming (MIQP). Our MIQP formulation explicitly imposes the safety constraints to the learned policy while minimizing the original loss function. The policy network is then verified to be locally safe. We demonstrate the application of our framework to derive safe policies for a robotic lower-leg prosthesis.
Safe Robot Learning in Assistive Devices through Neural Network Repair
Mar 08, 2023



Assistive robotic devices are a particularly promising field of application for neural networks (NN) due to the need for personalization and hard-to-model human-machine interaction dynamics. However, NN based estimators and controllers may produce potentially unsafe outputs over previously unseen data points. In this paper, we introduce an algorithm for updating NN control policies to satisfy a given set of formal safety constraints, while also optimizing the original loss function. Given a set of mixed-integer linear constraints, we define the NN repair problem as a Mixed Integer Quadratic Program (MIQP). In extensive experiments, we demonstrate the efficacy of our repair method in generating safe policies for a lower-leg prosthesis.
Learning Predictive Models for Ergonomic Control of Prosthetic Devices
Nov 13, 2020


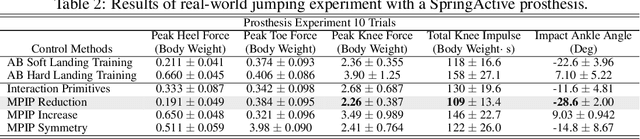
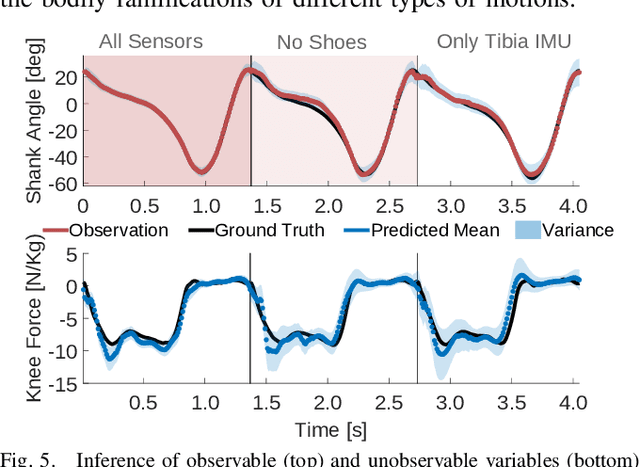
We present Model-Predictive Interaction Primitives -- a robot learning framework for assistive motion in human-machine collaboration tasks which explicitly accounts for biomechanical impact on the human musculoskeletal system. First, we extend Interaction Primitives to enable predictive biomechanics: the prediction of future biomechanical states of a human partner conditioned on current observations and intended robot control signals. In turn, we leverage this capability within a model-predictive control strategy to identify the future ergonomic and biomechanical ramifications of potential robot actions. Optimal control trajectories are selected so as to minimize future physical impact on the human musculoskeletal system. We empirically demonstrate that our approach minimizes knee or muscle forces via generated control actions selected according to biomechanical cost functions. Experiments are performed in synthetic and real-world experiments involving powered prosthetic devices.
Predictive Modeling of Periodic Behavior for Human-Robot Symbiotic Walking
May 27, 2020
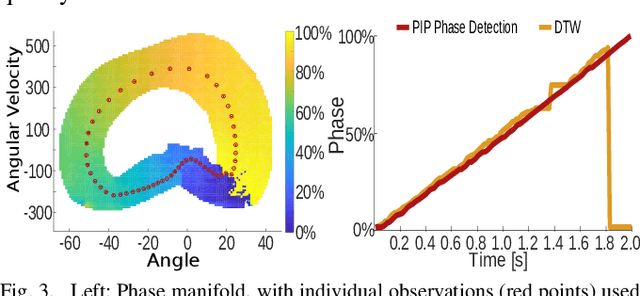
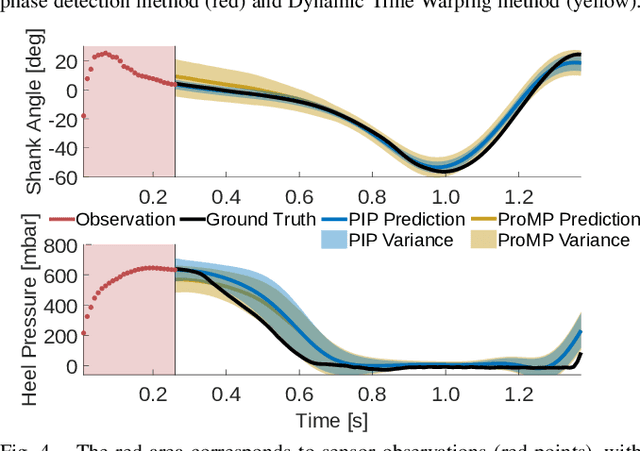
We propose in this paper Periodic Interaction Primitives - a probabilistic framework that can be used to learn compact models of periodic behavior. Our approach extends existing formulations of Interaction Primitives to periodic movement regimes, i.e., walking. We show that this model is particularly well-suited for learning data-driven, customized models of human walking, which can then be used for generating predictions over future states or for inferring latent, biomechanical variables. We also demonstrate how the same framework can be used to learn controllers for a robotic prosthesis using an imitation learning approach. Results in experiments with human participants indicate that Periodic Interaction Primitives efficiently generate predictions and ankle angle control signals for a robotic prosthetic ankle, with MAE of 2.21 degrees in 0.0008s per inference. Performance degrades gracefully in the presence of noise or sensor fall outs. Compared to alternatives, this algorithm functions 20 times faster and performed 4.5 times more accurately on test subjects.