 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmoBipedNav: Emotion-aware Social Navigation for Bipedal Robots with Deep Reinforcement Learning
Mar 16, 2025This study presents an emotion-aware navigation framework -- EmoBipedNav -- using deep reinforcement learning (DRL) for bipedal robots walking in socially interactive environments. The inherent locomotion constraints of bipedal robots challenge their safe maneuvering capabilities in dynamic environments. When combined with the intricacies of social environments, including pedestrian interactions and social cues, such as emotions, these challenges become even more pronounced. To address these coupled problems, we propose a two-stage pipeline that considers both bipedal locomotion constraints and complex social environments. Specifically, social navigation scenarios are represented using sequential LiDAR grid maps (LGMs), from which we extract latent features, including collision regions, emotion-related discomfort zones, social interactions, and the spatio-temporal dynamics of evolving environments. The extracted features are directly mapped to the actions of reduced-order models (ROMs) through a DRL architecture. Furthermore, the proposed framework incorporates full-order dynamics and locomotion constraints during training, effectively accounting for tracking errors and restrictions of the locomotion controller while planning the trajectory with ROMs. Comprehensive experiments demonstrate that our approach exceeds both model-based planners and DRL-based baselines. The hardware videos and open-source code are available at https://gatech-lidar.github.io/emobipednav.github.io/.
Humanoid Locomotion and Manipulation: Current Progress and Challenges in Control, Planning, and Learning
Jan 03, 2025



Humanoid robots have great potential to perform various human-level skills. These skills involve locomotion, manipulation, and cognitive capabilities. Driven by advances in machine learning and the strength of existing model-based approaches, these capabilities have progressed rapidly, but often separately. Therefore, a timely overview of current progress and future trends in this fast-evolving field is essential. This survey first summarizes the model-based planning and control that have been the backbone of humanoid robotics for the past three decades. We then explore emerging learning-based methods, with a focus on reinforcement learning and imitation learning that enhance the versatility of loco-manipulation skills. We examine the potential of integrating foundation models with humanoid embodiments, assessing the prospects for developing generalist humanoid agents. In addition, this survey covers emerging research for whole-body tactile sensing that unlocks new humanoid skills that involve physical interactions. The survey concludes with a discussion of the challenges and future trends.
Socially Acceptable Bipedal Robot Navigation via Social Zonotope Network Model Predictive Control
Jun 24, 2024This study addresses the challenge of social bipedal navigation in a dynamic, human-crowded environment, a research area largely underexplored in legged robot navigation. We present a zonotope-based framework that couples prediction and motion planning for a bipedal ego-agent to account for bidirectional influence with the surrounding pedestrians. This framework incorporates a Social Zonotope Network (SZN), a neural network that predicts future pedestrian reachable sets and plans future socially acceptable reachable set for the ego-agent. SZN generates the reachable sets as zonotopes for efficient reachability-based planning, collision checking, and online uncertainty parameterization. Locomotion-specific losses are added to the SZN training process to adhere to the dynamic limits of the bipedal robot that are not explicitly present in the human crowds data set. These loss functions enable the SZN to generate locomotion paths that are more dynamically feasible for improved tracking. SZN is integrated with a Model Predictive Controller (SZN-MPC) for footstep planning for our bipedal robot Digit. SZN-MPC solves for collision-free trajectory by optimizing through SZN's gradients. and Our results demonstrate the framework's effectiveness in producing a socially acceptable path, with consistent locomotion velocity, and optimality. The SZN-MPC framework is validated with extensive simulations and hardware experiments.
Bipedal Safe Navigation over Uncertain Rough Terrain: Unifying Terrain Mapping and Locomotion Stability
Mar 25, 2024We study the problem of bipedal robot navigation in complex environments with uncertain and rough terrain. In particular, we consider a scenario in which the robot is expected to reach a desired goal location by traversing an environment with uncertain terrain elevation. Such terrain uncertainties induce not only untraversable regions but also robot motion perturbations. Thus, the problems of terrain mapping and locomotion stability are intertwined. We evaluate three different kernels for Gaussian process (GP) regression to learn the terrain elevation. We also learn the motion deviation resulting from both the terrain as well as the discrepancy between the reduced-order Prismatic Inverted Pendulum Model used for planning and the full-order locomotion dynamics. We propose a hierarchical locomotion-dynamics-aware sampling-based navigation planner. The global navigation planner plans a series of local waypoints to reach the desired goal locations while respecting locomotion stability constraints. Then, a local navigation planner is used to generate a sequence of dynamically feasible footsteps to reach local waypoints. We develop a novel trajectory evaluation metric to minimize motion deviation and maximize information gain of the terrain elevation map. We evaluate the efficacy of our planning framework on Digit bipedal robot simulation in MuJoCo.
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Bipedal Social Navigation
Mar 25, 2024This study addresses the challenge of bipedal navigation in a dynamic human-crowded environment, a research area that remains largely underexplored in the field of legged navigation. We propose two cascaded zonotope-based neural networks: a Pedestrian Prediction Network (PPN) for pedestrians' future trajectory prediction and an Ego-agent Social Network (ESN) for ego-agent social path planning. Representing future paths as zonotopes allows for efficient reachability-based planning and collision checking. The ESN is then integrated with a Model Predictive Controller (ESN-MPC) for footstep planning for our bipedal robot Digit designed by Agility Robotics. ESN-MPC solves for a collision-free optimal trajectory by optimizing through the gradients of ESN. ESN-MPC optimal trajectory is sent to the low-level controller for full-order simulation of Digit. The overall proposed framework is validated with extensive simulations on randomly generated initial settings with varying human crowd densities.
Socially Acceptable Bipedal Navigation: A Signal-Temporal-Logic- Driven Approach for Safe Locomotion
Oct 15, 2023Social navigation for bipedal robots remains relatively unexplored due to the highly complex, nonlinear dynamics of bipedal locomotion. This study presents a preliminary exploration of social navigation for bipedal robots in a human crowded environment. We propose a social path planner that ensures the locomotion safety of the bipedal robot while navigating under a social norm. The proposed planner leverages a conditional variational autoencoder architecture and learns from human crowd datasets to produce a socially acceptable path plan. Robot-specific locomotion safety is formally enforced by incorporating signal temporal logic specifications during the learning process. We demonstrate the integration of the social path planner with a model predictive controller and a low-level passivity controller to enable comprehensive full-body joint control of Digit in a dynamic simulation.
Integrated Task and Motion Planning for Safe Legged Navigation in Partially Observable Environments
Oct 23, 2021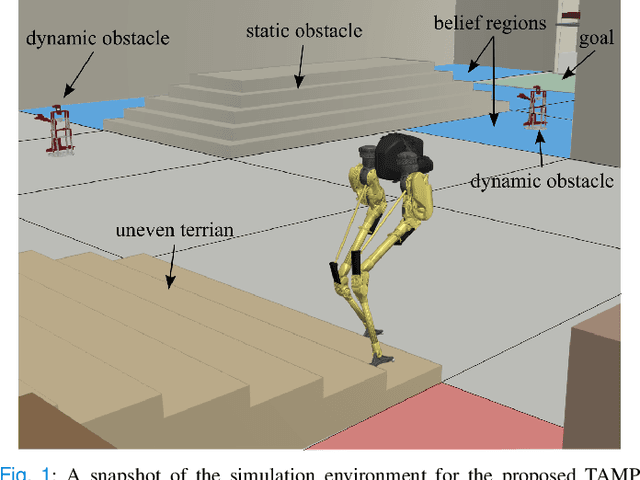
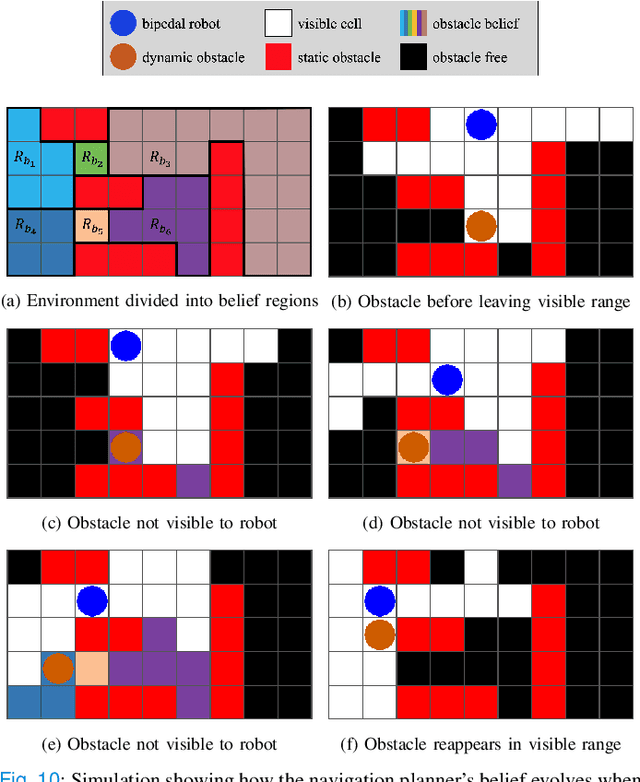
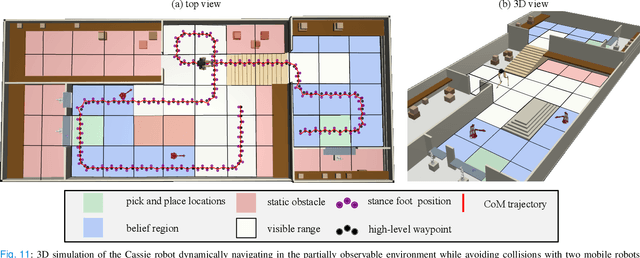
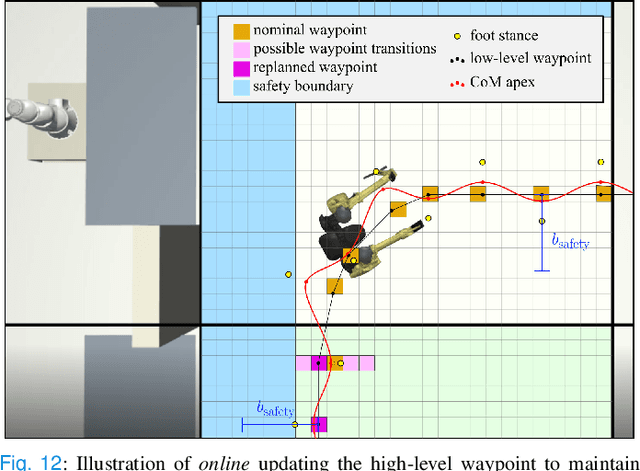
This study proposes a hierarchically integrated framework for safe task and motion planning (TAMP) of bipedal locomotion in a partially observable environment with dynamic obstacles and uneven terrain. The high-level task planner employs linear temporal logic (LTL) for a reactive game synthesis between the robot and its environment and provides a formal guarantee on navigation safety and task completion. To address environmental partial observability, a belief abstraction is employed at the high-level navigation planner to estimate the dynamic obstacles' location when they are out of the robot's local field of view. Accordingly, a synthesized action planner sends a set of locomotion actions including walking step, step height, and heading angle change, to the middle-level motion planner, while incorporating safe locomotion specifications extracted from safety theorems based on a reduced-order model (ROM) of the locomotion process. The motion planner employs the ROM to design safety criteria and a sampling algorithm to generate non-periodic motion plans that accurately track high-level actions. To address external perturbations, this study also investigates safe sequential composition of the keyframe locomotion state and achieves robust transitions against external perturbations through reachability analysis. A set of ROM-based hyperparameters are finally interpolated to design whole-body locomotion gaits generated by trajectory optimization and validate the viable deployment of the ROM-based TAMP to the full-body trajectory generation for a 20-degrees-of-freedom Cassie bipedal robot designed by Agility Robotics. The proposed framework is validated by a set of scenarios in uneven, partially observable environments with dynamical obstacles.
Towards Safe Locomotion Navigation in Partially Observable Environments with Uneven Terrain
Sep 10, 2020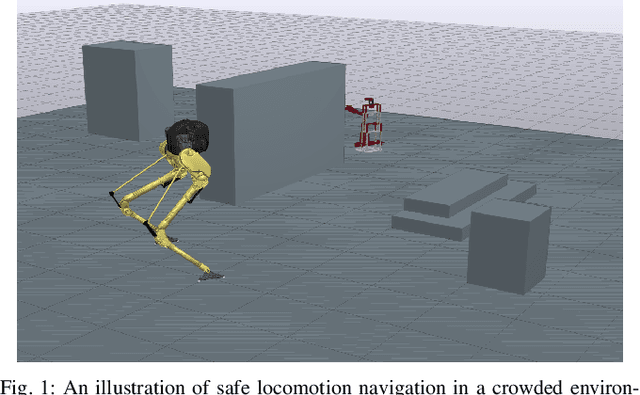
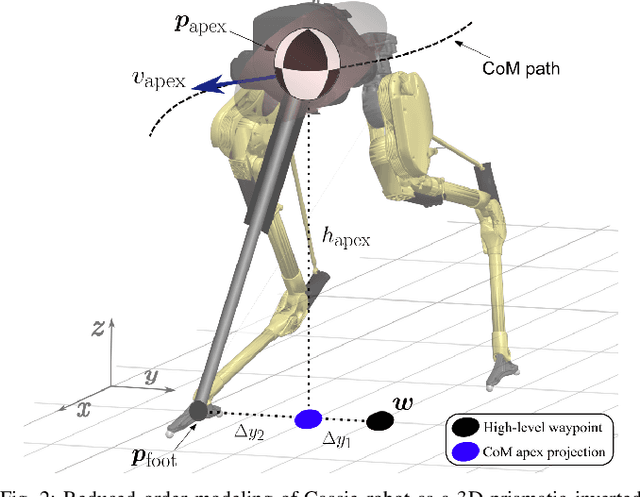
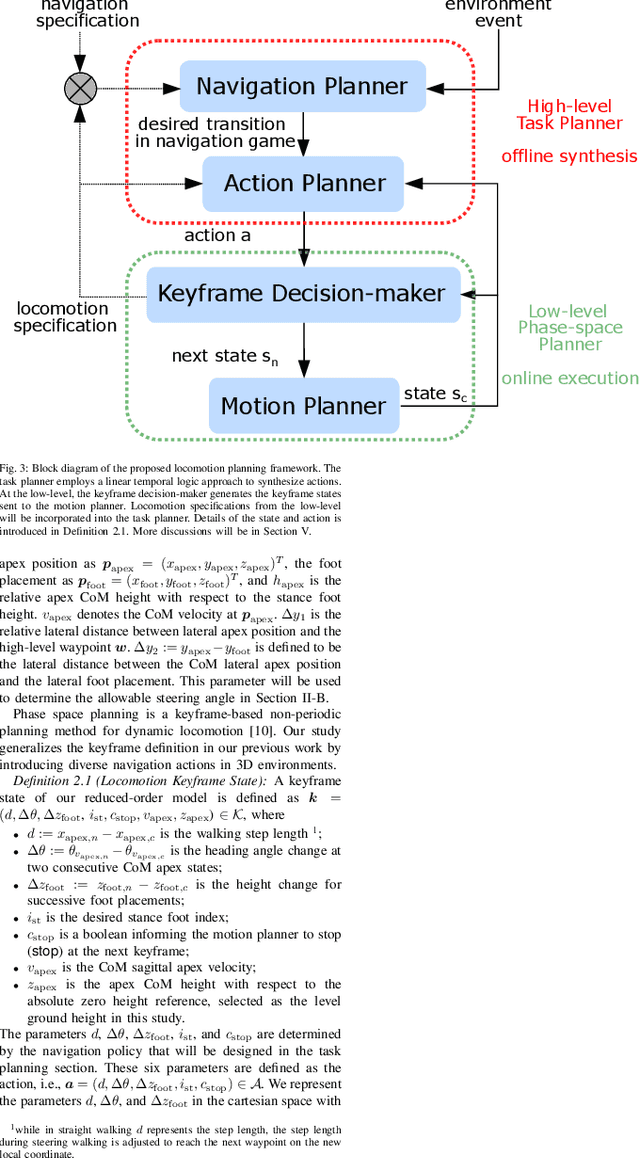
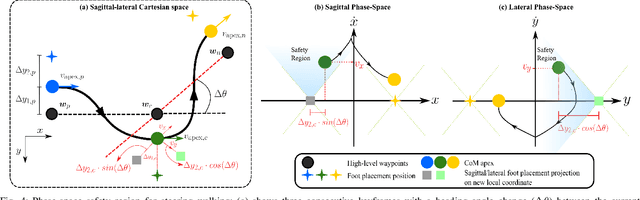
This study proposes an integrated task and motion planning method for dynamic locomotion in partially observable environments with multi-level safety guarantees. This layered planning framework is composed of a high-level symbolic task planner and a low-level phase-space motion planner. A belief abstraction at the task planning level enables belief estimation of dynamic obstacle locations and guarantees navigation safety with collision avoidance. The high-level task planner, i.e., a two-level navigation planner, employs linear temporal logic for a reactive game synthesis between the robot and its environment while incorporating low-level safe keyframe policies into formal task specification design. The synthesized task planner commands a series of locomotion actions including walking step length, step height, and heading angle changes, to the underlying keyframe decision-maker, which further determines the robot center-of-mass apex velocity keyframe. The low-level phase-space planner uses a reduced-order locomotion model to generate non-periodic trajectories meeting balancing safety criteria for straight and steering walking. These criteria are characterized by constraints on locomotion keyframe states, and are used to define keyframe transition policies via viability kernels. Simulation results of a Cassie bipedal robot designed by Agility Robotics demonstrate locomotion maneuvering in a three-dimensional, partially observable environment consisting of dynamic obstacles and uneven terrain.