 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Heterogeneous Capabilities in Multi-Agent Systems for Environmental Conflict Resolution
Jun 03, 2022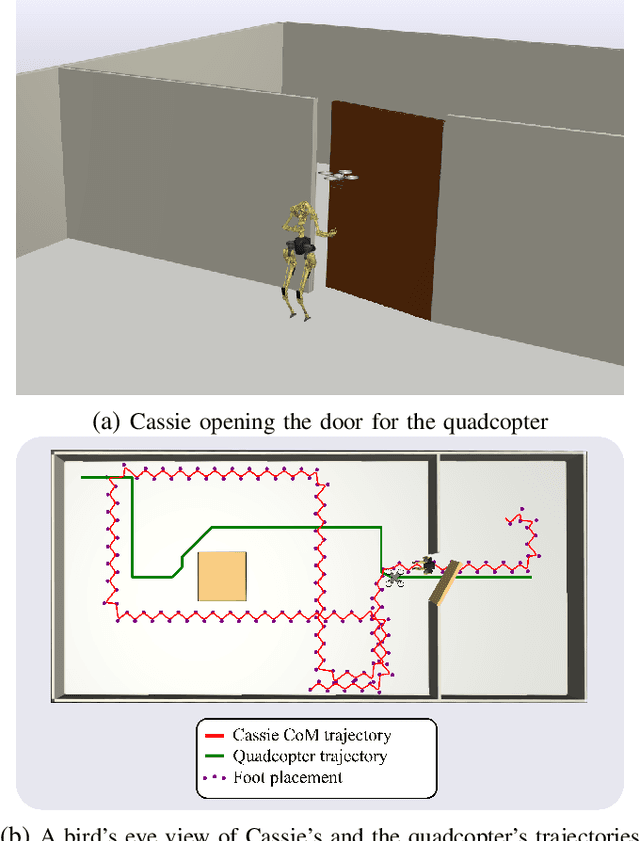
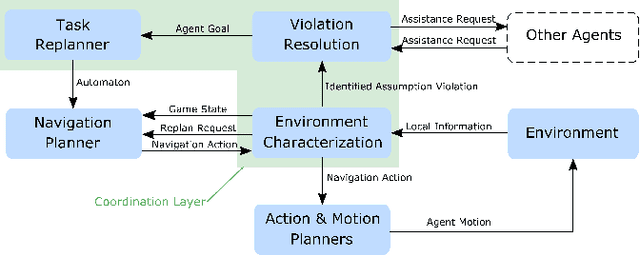
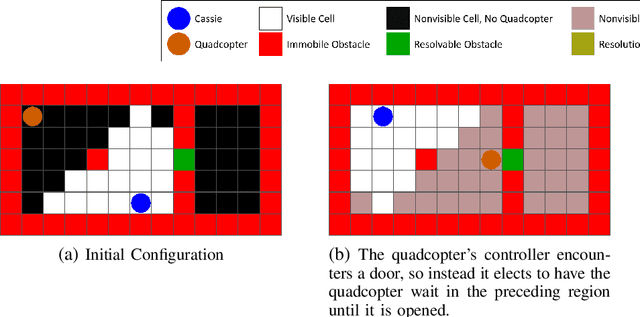
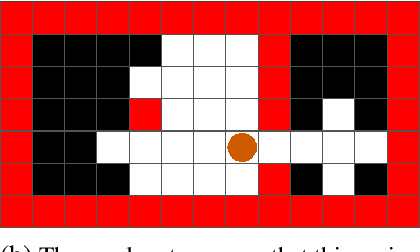
In this paper, we introduce a high-level controller synthesis framework that enables teams of heterogeneous agents to assist each other in resolving environmental conflicts that appear at runtime. This conflict resolution method is built upon temporal-logic-based reactive synthesis to guarantee safety and task completion under specific environment assumptions. In heterogeneous multi-agent systems, every agent is expected to complete its own tasks in service of a global team objective. However, at runtime, an agent may encounter un-modeled obstacles (e.g., doors or walls) that prevent it from achieving its own task. To address this problem, we take advantage of the capability of other heterogeneous agents to resolve the obstacle. A controller framework is proposed to redirect agents with the capability of resolving the appropriate obstacles to the required target when such a situation is detected. A set of case studies involving a bipedal robot Digit and a quadcopter are used to evaluate the controller performance in action. Additionally, we implement the proposed framework on a physical multi-agent robotic system to demonstrate its viability for real world applications.
Integrated Task and Motion Planning for Safe Legged Navigation in Partially Observable Environments
Oct 23, 2021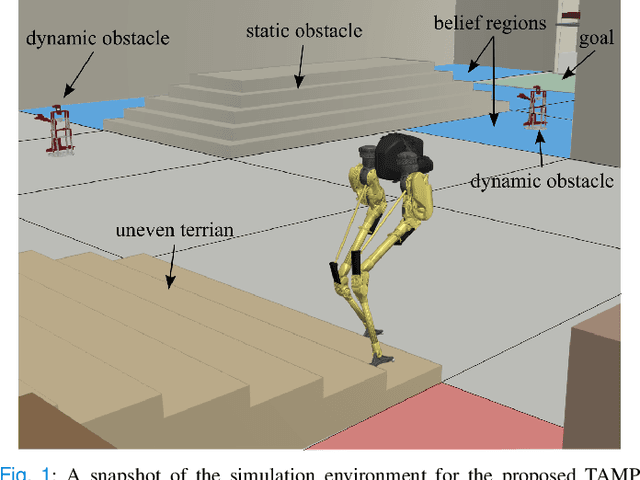
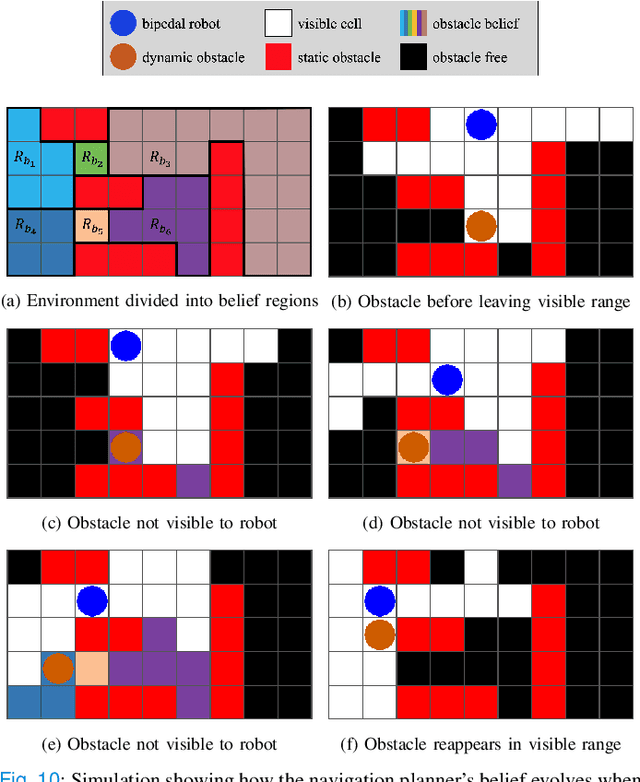
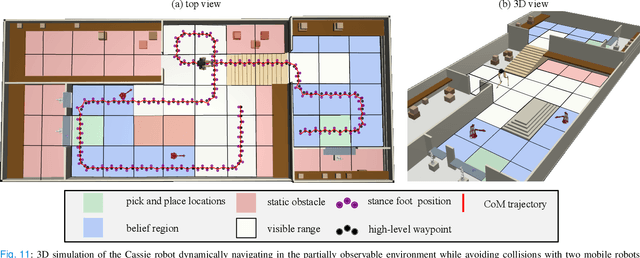
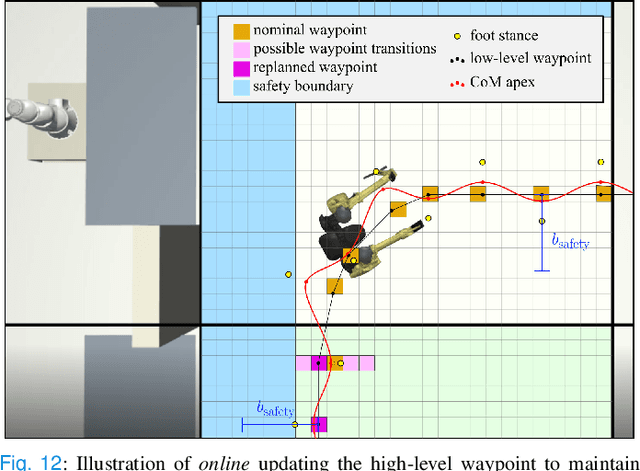
This study proposes a hierarchically integrated framework for safe task and motion planning (TAMP) of bipedal locomotion in a partially observable environment with dynamic obstacles and uneven terrain. The high-level task planner employs linear temporal logic (LTL) for a reactive game synthesis between the robot and its environment and provides a formal guarantee on navigation safety and task completion. To address environmental partial observability, a belief abstraction is employed at the high-level navigation planner to estimate the dynamic obstacles' location when they are out of the robot's local field of view. Accordingly, a synthesized action planner sends a set of locomotion actions including walking step, step height, and heading angle change, to the middle-level motion planner, while incorporating safe locomotion specifications extracted from safety theorems based on a reduced-order model (ROM) of the locomotion process. The motion planner employs the ROM to design safety criteria and a sampling algorithm to generate non-periodic motion plans that accurately track high-level actions. To address external perturbations, this study also investigates safe sequential composition of the keyframe locomotion state and achieves robust transitions against external perturbations through reachability analysis. A set of ROM-based hyperparameters are finally interpolated to design whole-body locomotion gaits generated by trajectory optimization and validate the viable deployment of the ROM-based TAMP to the full-body trajectory generation for a 20-degrees-of-freedom Cassie bipedal robot designed by Agility Robotics. The proposed framework is validated by a set of scenarios in uneven, partially observable environments with dynamical obstacles.
Towards Safe Locomotion Navigation in Partially Observable Environments with Uneven Terrain
Sep 10, 2020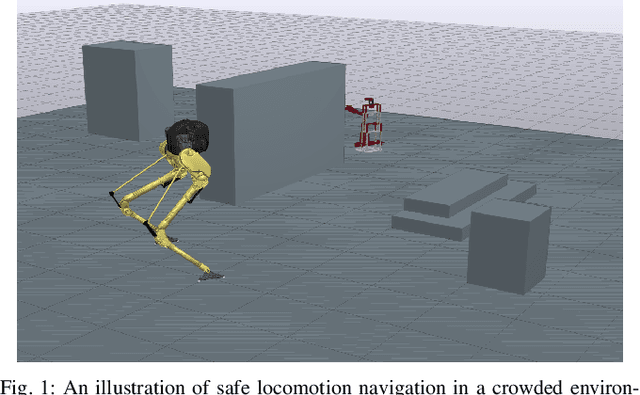
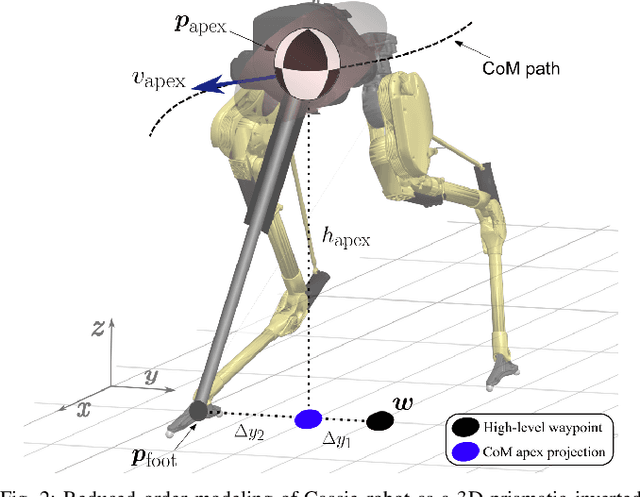
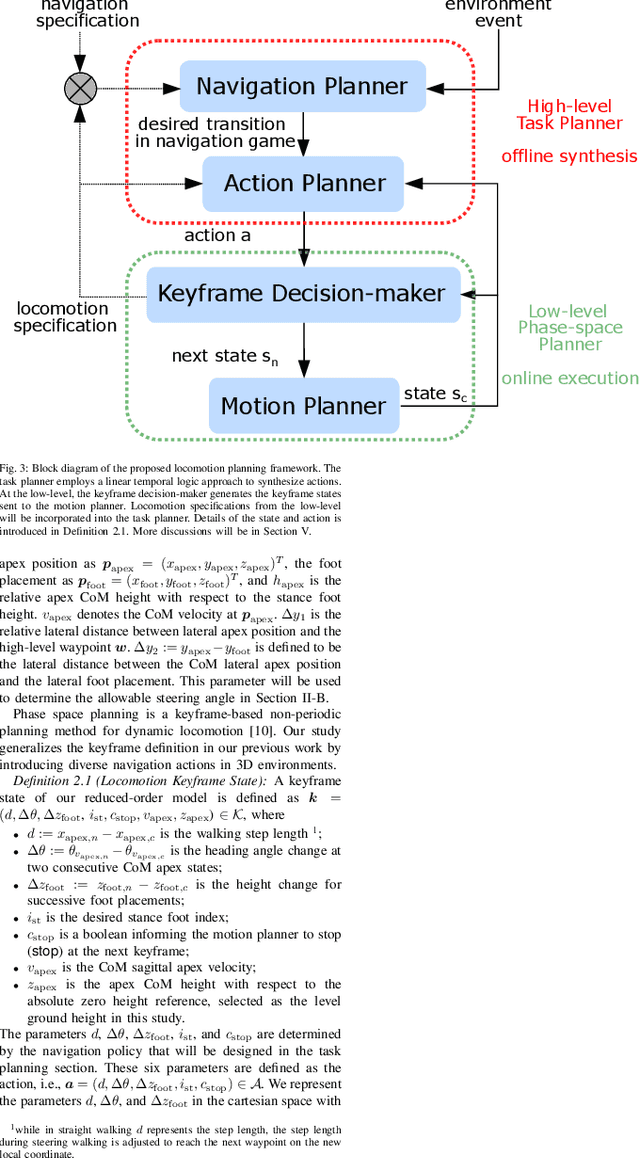
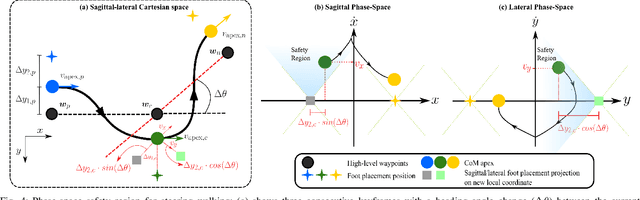
This study proposes an integrated task and motion planning method for dynamic locomotion in partially observable environments with multi-level safety guarantees. This layered planning framework is composed of a high-level symbolic task planner and a low-level phase-space motion planner. A belief abstraction at the task planning level enables belief estimation of dynamic obstacle locations and guarantees navigation safety with collision avoidance. The high-level task planner, i.e., a two-level navigation planner, employs linear temporal logic for a reactive game synthesis between the robot and its environment while incorporating low-level safe keyframe policies into formal task specification design. The synthesized task planner commands a series of locomotion actions including walking step length, step height, and heading angle changes, to the underlying keyframe decision-maker, which further determines the robot center-of-mass apex velocity keyframe. The low-level phase-space planner uses a reduced-order locomotion model to generate non-periodic trajectories meeting balancing safety criteria for straight and steering walking. These criteria are characterized by constraints on locomotion keyframe states, and are used to define keyframe transition policies via viability kernels. Simulation results of a Cassie bipedal robot designed by Agility Robotics demonstrate locomotion maneuvering in a three-dimensional, partially observable environment consisting of dynamic obstacles and uneven terrain.